e-Series_Service_Manual_CN.pdf - 第125页
6. 故障排除 优傲 机器人 维修手册 1 19 维修手册 版权 © 2009 – 2020 优傲机器人公 司版权所有。保留所有权利。 C208A 调试认定失败 已执行认定。 注意: 该功能仅用 于测试目的。 C209A 触发了保护性停止 (仅用 于测试目的) 触发了保护性停止。 注意: 该功 能仅用于测试目的。 C210A 如果机器人处于本地 (示 教器) 控制, Socket 为只 读 在 PolyScope 中 设 置 远 程 控…
优傲机器人
6. 故障排除
维修手册
118
维修手册
版权 © 2009–2020 优傲机器人公司版权所有。保留所有权利。
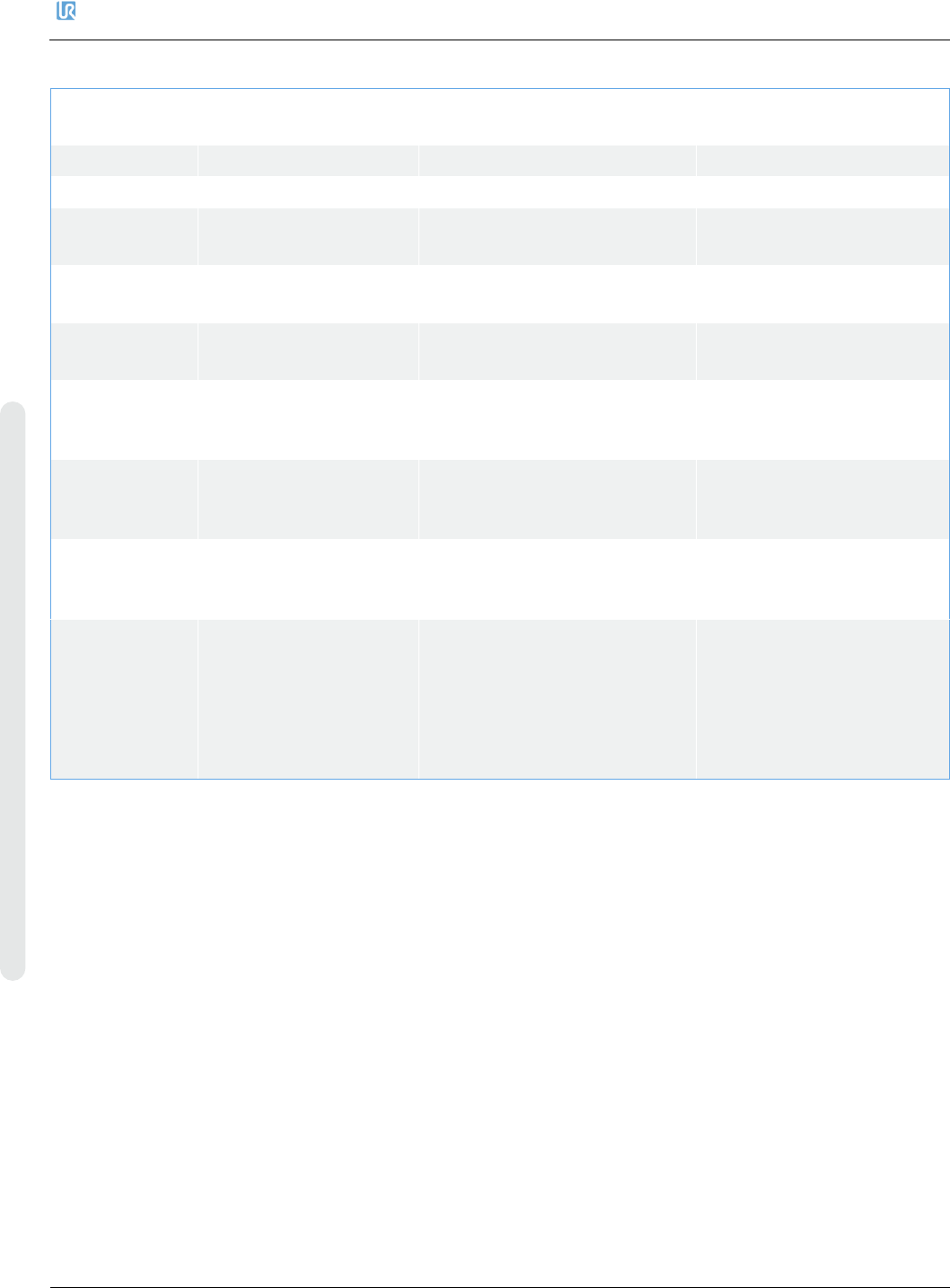
C205A
目标速度与目标位置不
符
C205A0
目标位置与速度不一致
C206A
完整性检查失败
C206A0
目标关节速度与目标关
节位置变化不符 - 底座
C206A1
目标关节速度与目标关
节位置变化不符 - 肩部
C206A2
目标关节速度与目标关
节位置变化不符 - 肘部
C206A3
目标关节速度与目标关
节位置变化不符 - 手腕
1
C206A4
目标关节速度与目标关
节位置变化不符 - 手腕
2
C206A5
目标关节速度与目标关
节位置变化不符 - 手腕
3
C207A
现场总线输入断开
检查现场总线的连接(RTDE
、ModBus、 EtherNet/IP和
Profinet)或在该安装中禁用
现场总线。检查RTDE看门狗
的功能。检查URCap是否也
在使用此功能。
6. 故障排除
优傲机器人
维修手册
119
维修手册
版权 © 2009–2020 优傲机器人公司版权所有。保留所有权利。
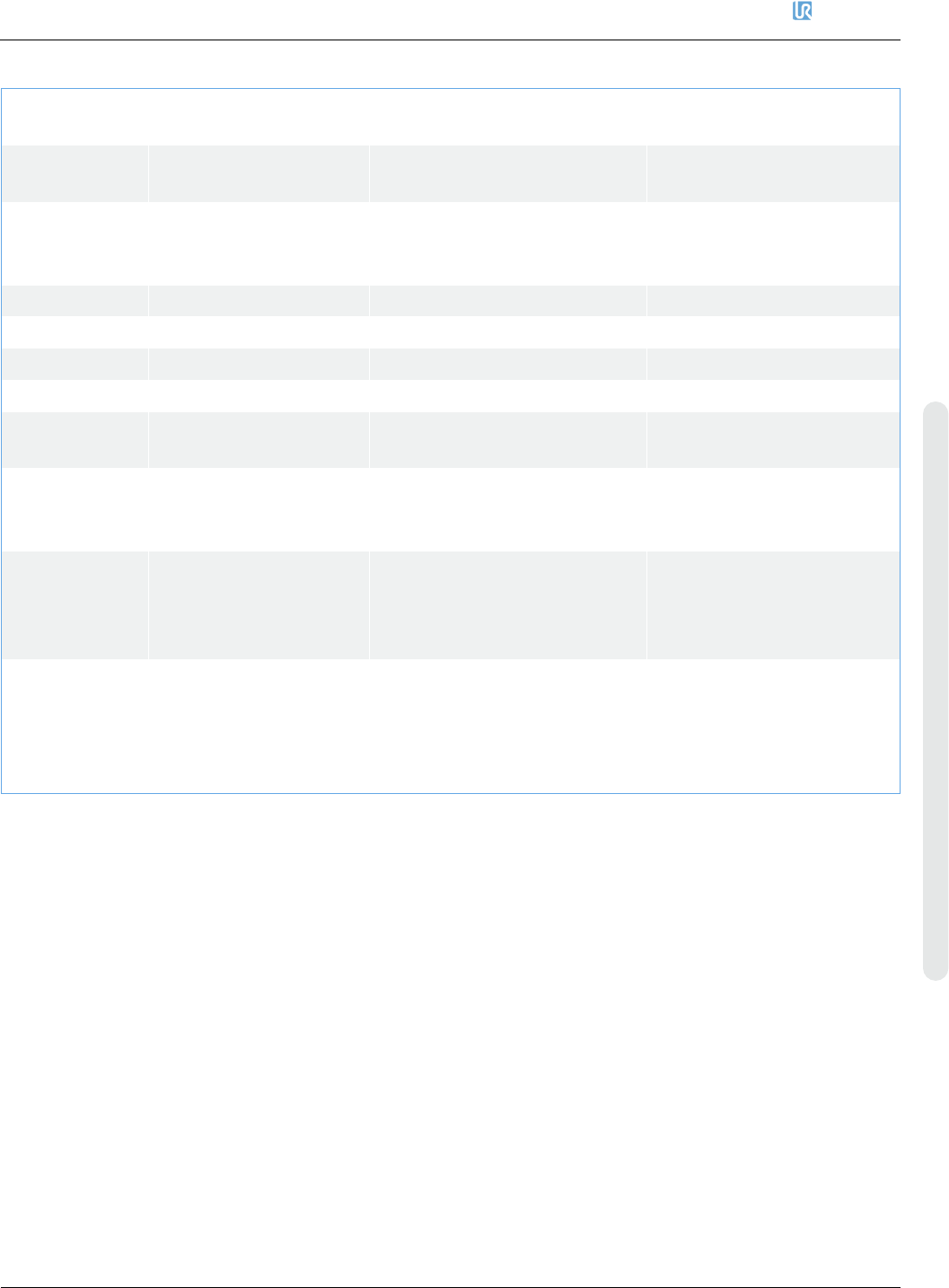
C208A
调试认定失败
已执行认定。注意:该功能仅用
于测试目的。
C209A
触发了保护性停止(仅用
于测试目的)
触发了保护性停止。注意:该功
能仅用于测试目的。
C210A
如果机器人处于本地(示
教器)控制,Socket为只
读
在PolyScope中设置远程控
制机器人,以便在控制器中
接收脚本
C211A
操作模式已更改
C211A0
禁用
C211A1
自动
C211A2
手动
C212A
已加载程序中的名称冲
突
C212A1
在功能名称与程序变量
之 间 出 现 {unsigned} 名
称冲突
某些功能名称和程序变量的名
称相同,这可能会导致混淆。
给程序变量重新命名。
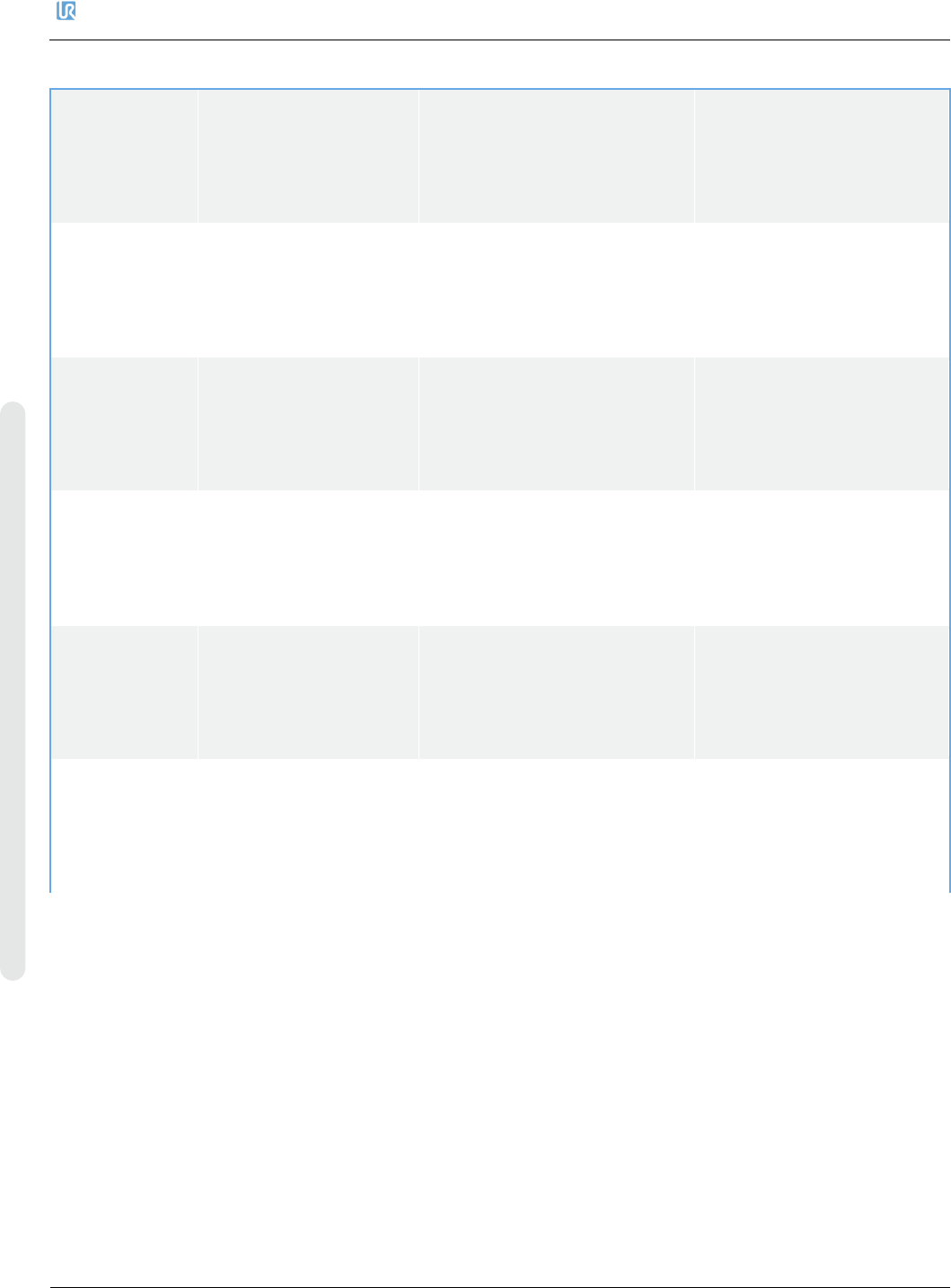
C213A
未 找 到 运 动 学 校 准 (
calibration.conf 文 件 损
坏或丢失)
Calibration.conf文件损坏 或丢
失
如果机器人需要改进其运动
学性能,可能需要进行新的
运动学校准,否则,请忽略
此消息。
C214A
机器人的运动学校准与
关节不符
calibration.conf 中存储的校准
校验和与关节的值不符
如果将程序从另一机器人移
动到这个机器人上,则要重
新对这个机器人进行运动学
校准,以改善运动学性能,
否则请忽略此消息。
优傲机器人
6. 故障排除
维修手册
120
维修手册
版权 © 2009–2020 优傲机器人公司版权所有。保留所有权利。
C214A1
运动学校准校验和与基
座校验和不符
calibration.conf 中存储的校准
校验和与关节的值不符
如果将程序从另一机器人移
动到这个机器人上,则要重
新对这个机器人进行运动学
校准,以改善运动学性能,
否则请忽略此消息。
C214A2
运动学校准校验和与肩
部校验和不符
calibration.conf 中存储的校准
校验和与关节的值不符
如果将程序从另一机器人移
动到这个机器人上,则要重
新对这个机器人进行运动学
校准,以改善运动学性能,
否则请忽略此消息。
C214A3
运动学校准校验和与肘
部校验和不符
calibration.conf 中存储的校准
校验和与关节的值不符
如果将程序从另一机器人移
动到这个机器人上,则要重
新对这个机器人进行运动学
校准,以改善运动学性能,
否则请忽略此消息。
C214A4
运动学校准校验和与手
腕 1 校验和不符
calibration.conf 中存储的校准
校验和与关节的值不符
如果将程序从另一机器人移
动到这个机器人上,则要重
新对这个机器人进行运动学
校准,以改善运动学性能,
否则请忽略此消息。
C214A5
运动学校准校验和与手
腕 2 校验和不符
calibration.conf 中存储的校准
校验和与关节的值不符
如果将程序从另一机器人移
动到这个机器人上,则要重
新对这个机器人进行运动学
校准,以改善运动学性能,
否则请忽略此消息。
C214A6
运动学校准校验和与手
腕 3 校验和不符
calibration.conf 中存储的校准
校验和与关节的值不符
如果将程序从另一机器人移
动到这个机器人上,则要重
新对这个机器人进行运动学
校准,以改善运动学性能,
否则请忽略此消息。