e-Series_Service_Manual_CN.pdf - 第20页
优傲机器人 3. 建议的检查活动 维修手册 14 维修手册 版权 © 2009 – 2020 优傲机器人公 司版权所有。保留所有权利。 2. 按住 “F reedrive (自由驱动) ” 。状态更 改为 反向 驱动 标准示教器 3PE 示教器 3. 像在自由驱动模式下一 样移动机 器人。只要按下 “Freedrive (自由 驱动) ” 按钮 ,关节制动 器就 会释放。 注意 机械臂反向驱动模式下 移动时会 “ 很重 ” ,所以需要 …
3. 建议的检查活动
优傲机器人
维修手册
13
维修手册
版权 © 2009–2020 优傲机器人公司版权所有。保留所有权利。
自由驱动
1. 根据工具规格,拆下附属装置或设置工具中心点(TCP)/有效负载/CoG。
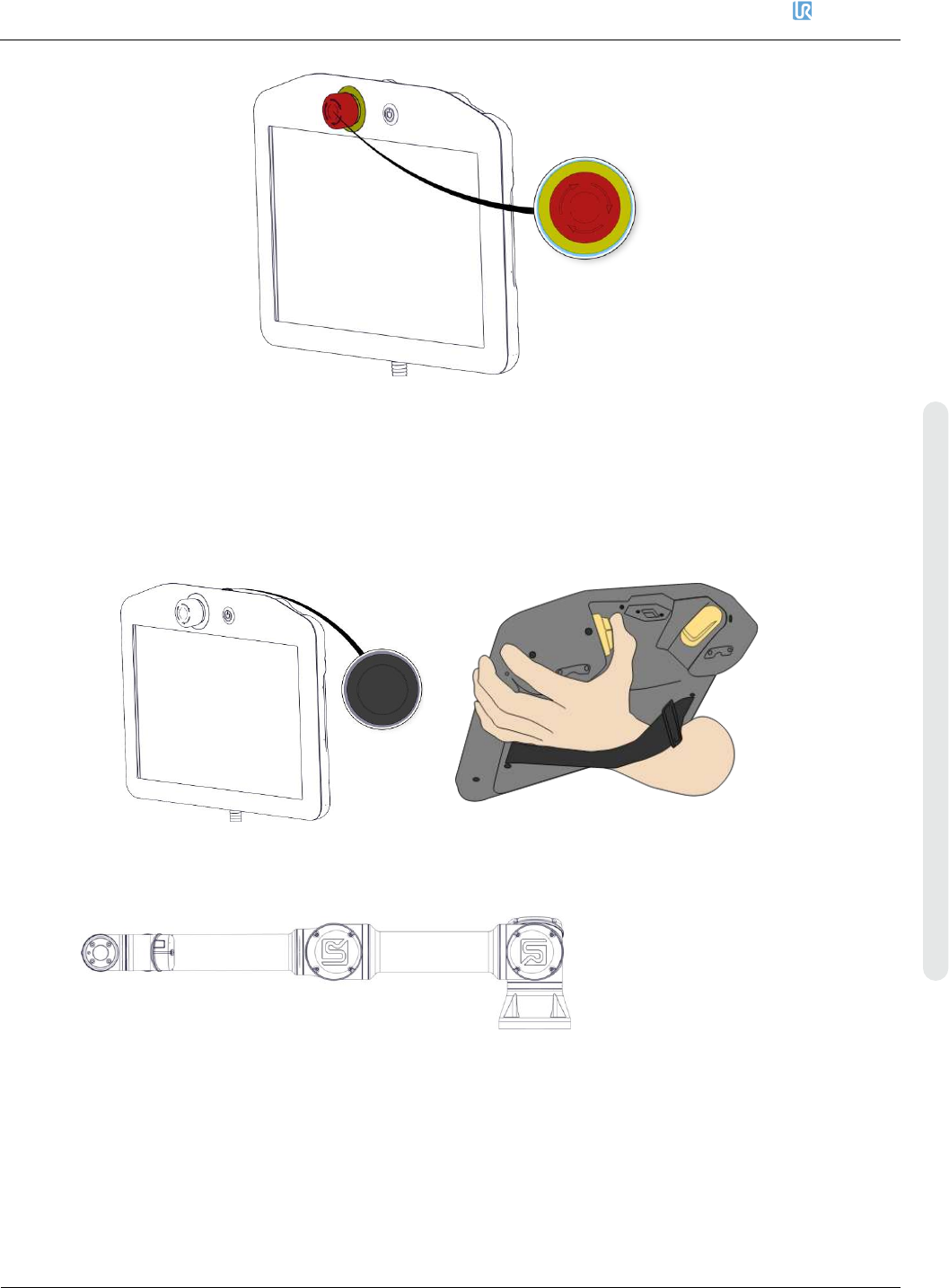
2. 若要在自由驱动模式下移动机械臂:
⚫ 按住在标准示教器上的“Freedrive(自由驱动)”按钮。
⚫ 如果是 3PE 示教器,则要快速轻按,然后轻轻按住 3PE 按钮。
标准示教器
3PE 示教器
3. 将机器人拉/推至水平伸展位置并释放。
4. 确认机械臂可在没有支撑,且未按“Freedrive(自由驱动)”或 3PE 按钮的情况下保持在原位。
反向驱动
如果机械臂将要与某物发生碰撞,则可以使用“Backdrive(反向驱动)”功能将机械臂移动到安全位置,
然后再(重新)初始化。
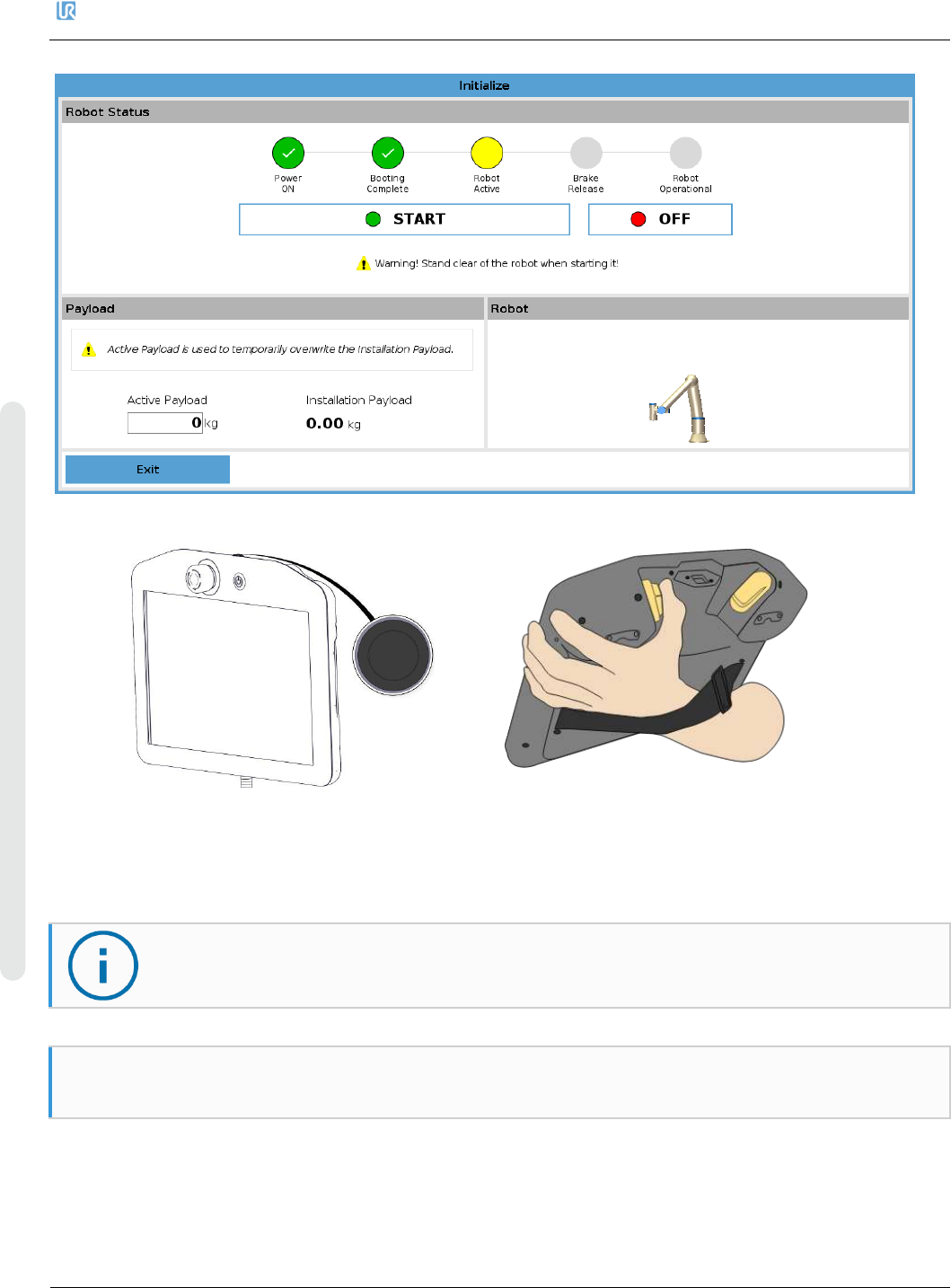
1. 按下“ON(开)”接通电源。状态变更为
机器人启用
优傲机器人
3. 建议的检查活动
维修手册
14
维修手册
版权 © 2009–2020 优傲机器人公司版权所有。保留所有权利。
2. 按住“Freedrive(自由驱动)”。状态更改为
反向驱动
标准示教器
3PE 示教器
3. 像在自由驱动模式下一样移动机器人。只要按下“Freedrive(自由驱动)”按钮,关节制动器就
会释放。
注意
机械臂反向驱动模式下移动时会“很重”,所以需要移动关节。
强制措施
您必须测试所有关节的“反向驱动”模式。
安全设置
确认机器人安全设置是否符合机器人安装风险评估。
额外的安全输入和输出仍在运行
3. 建议的检查活动
优傲机器人
维修手册
15
维修手册
版权 © 2009–2020 优傲机器人公司版权所有。保留所有权利。
检查哪些安全输入和输出处于可用状态,以及它们是否可通过 PolyScope 或外部设备触发。
备份数据
参见
数据备份章节
3.2.3. 目视检查:控制箱
1. 断开控制箱的电源线。
2. 检查控制板上的端子是否正确插入。如果电线松动,则不能忽视。
3. 检查控制箱内是否有污垢/灰尘。根据需要使用防静电放电的真空吸尘器清洁。
注意
使用压缩空气清洁控制箱会损坏控制箱组件。
⚫ 切勿使用压缩空气清洁控制箱。
3.2.4. 清洁
另请参见与 COVID-19 相关的机器人清洁
清洁示教器触摸屏
使用不含稀释剂或任何腐蚀性添加剂的温和工业清洗剂清洁。请勿使用打磨材料擦拭屏幕。优傲机器人
不推荐使用特定的清洁剂。
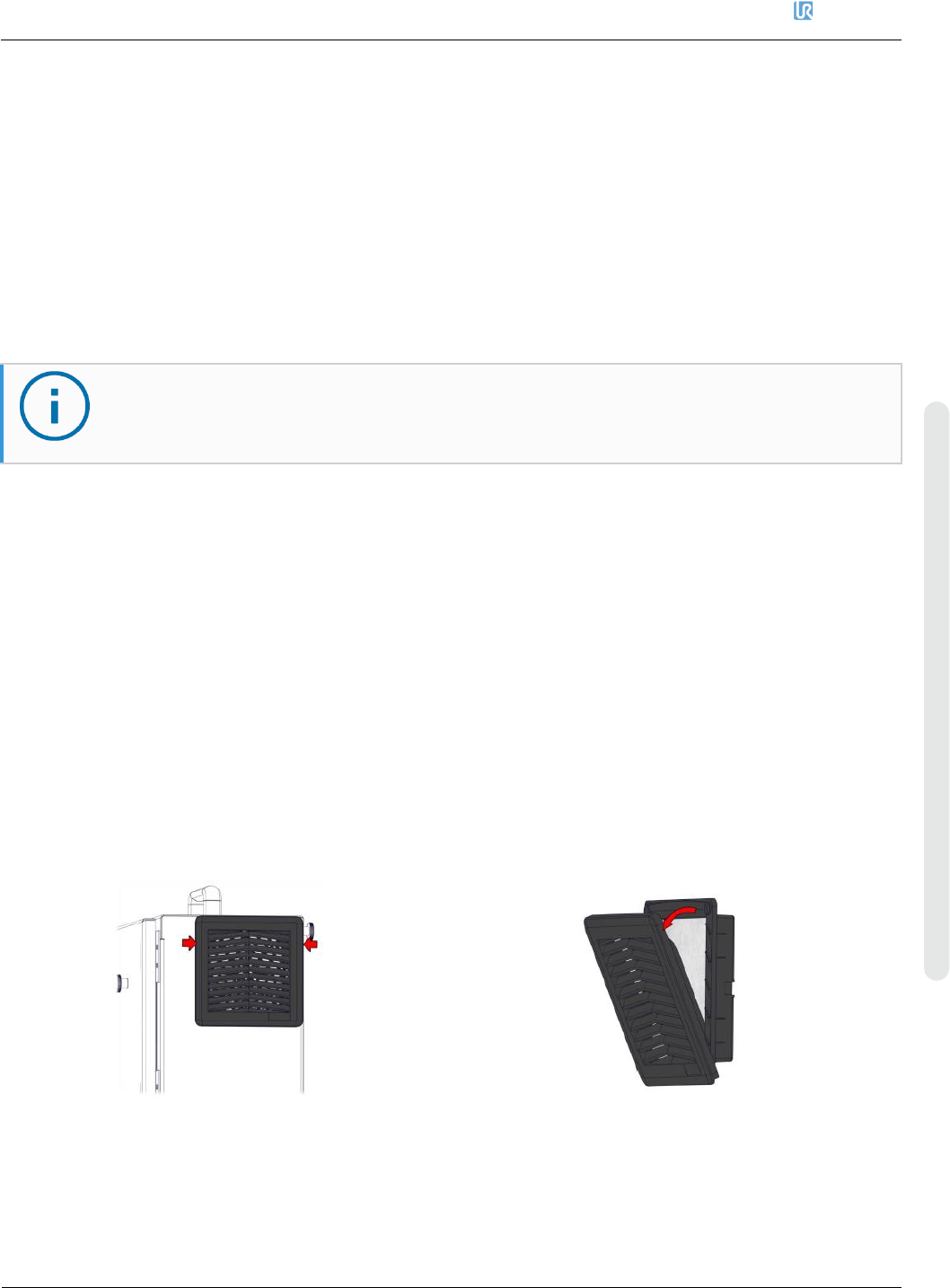
清洁控制箱过滤器
控制箱的两侧各有一个过滤器。
1. 向下图中红色箭头所示的方向拉动,以轻轻地拆除塑料外框。框架向外倾斜。
2. 拆下两个过滤器,然后使用低压空气清洁。
根据需要更换过滤器。