e-Series_Service_Manual_CN.pdf - 第31页
4. 维修和更换零件 优傲 机器人 维修手册 25 维修手册 版权 © 2009 – 2020 优傲机器人公 司版权所有。保留所有权利。 4.2.7. 螺纹连接 以下两节描述拆卸和组 装螺纹连接关节的方式。 螺纹连接位置 UR3e UR5e Ur10e 和 UR16e
优傲机器人
4. 维修和更换零件
维修手册
24
维修手册
版权 © 2009–2020 优傲机器人公司版权所有。保留所有权利。
尺寸3
尺寸4
4. 维修和更换零件
优傲机器人
维修手册
25
维修手册
版权 © 2009–2020 优傲机器人公司版权所有。保留所有权利。
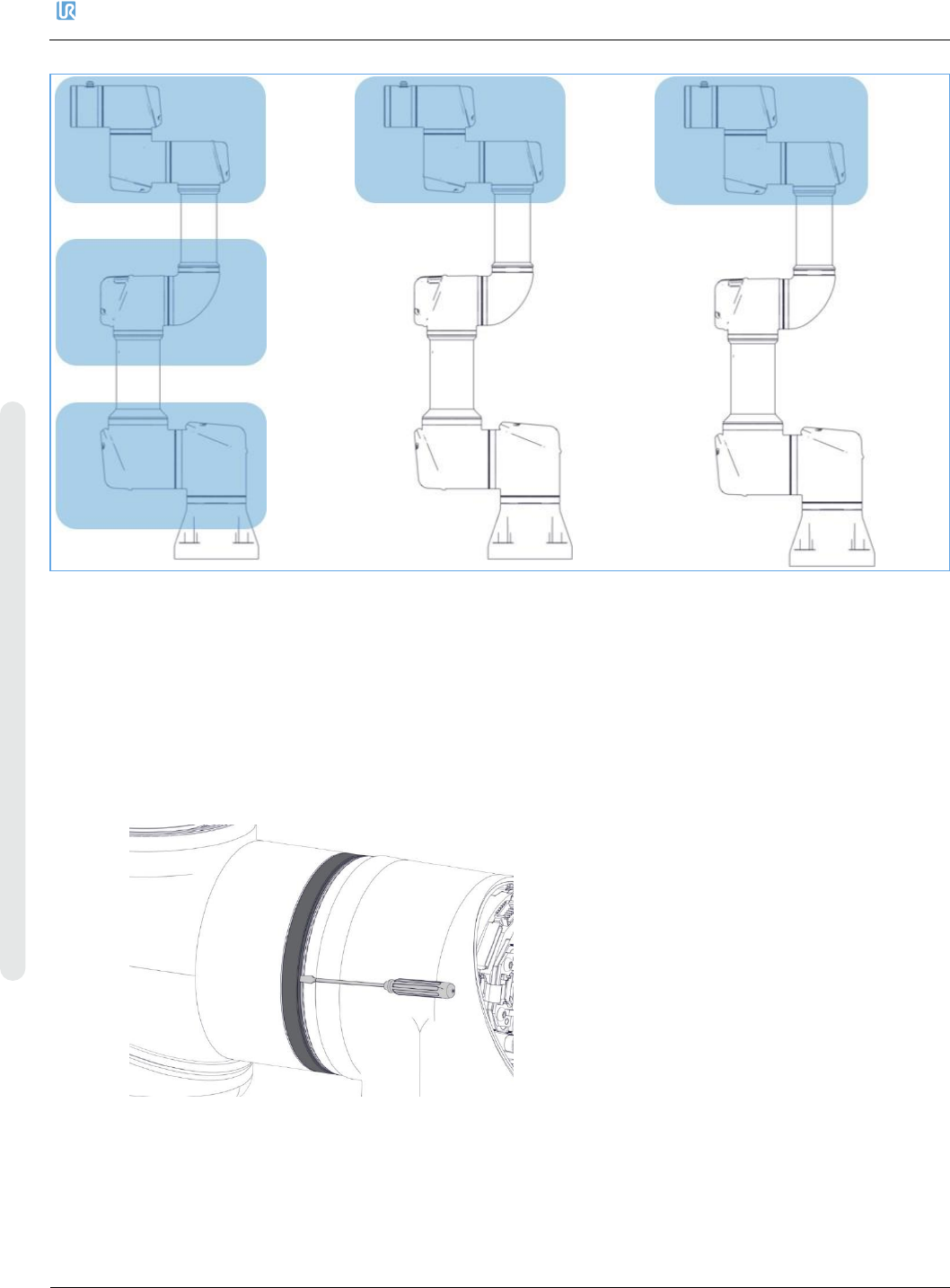
4.2.7. 螺纹连接
以下两节描述拆卸和组装螺纹连接关节的方式。
螺纹连接位置
UR3e
UR5e
Ur10e 和 UR16e
优傲机器人
4. 维修和更换零件
维修手册
26
维修手册
版权 © 2009–2020 优傲机器人公司版权所有。保留所有权利。
拆卸螺纹连接
1. 拆下蓝色盖子上的螺钉,然后按照章节
分离关节与配对关节的通用指南所述,拆下蓝色盖子
2. 按照章节
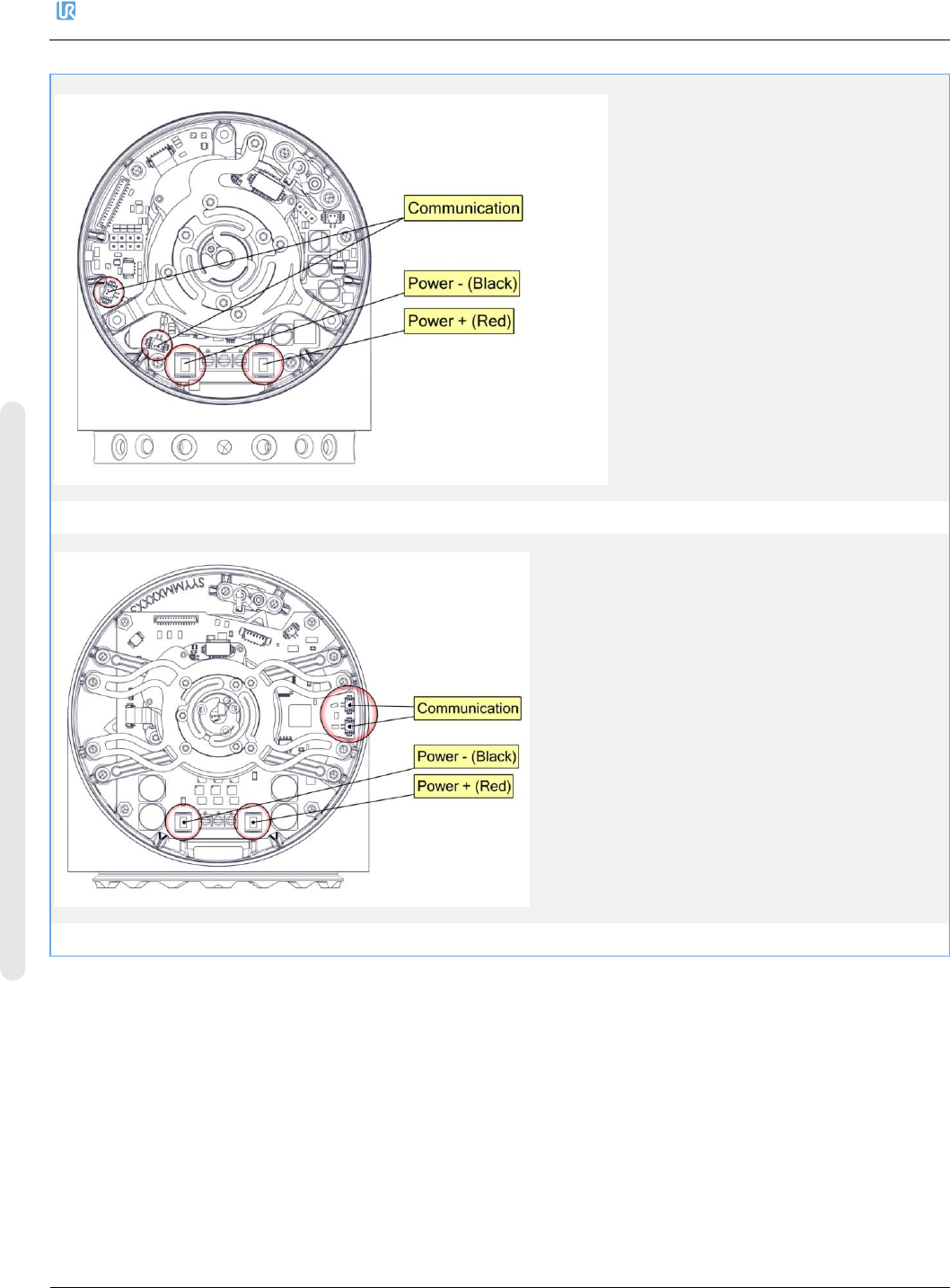
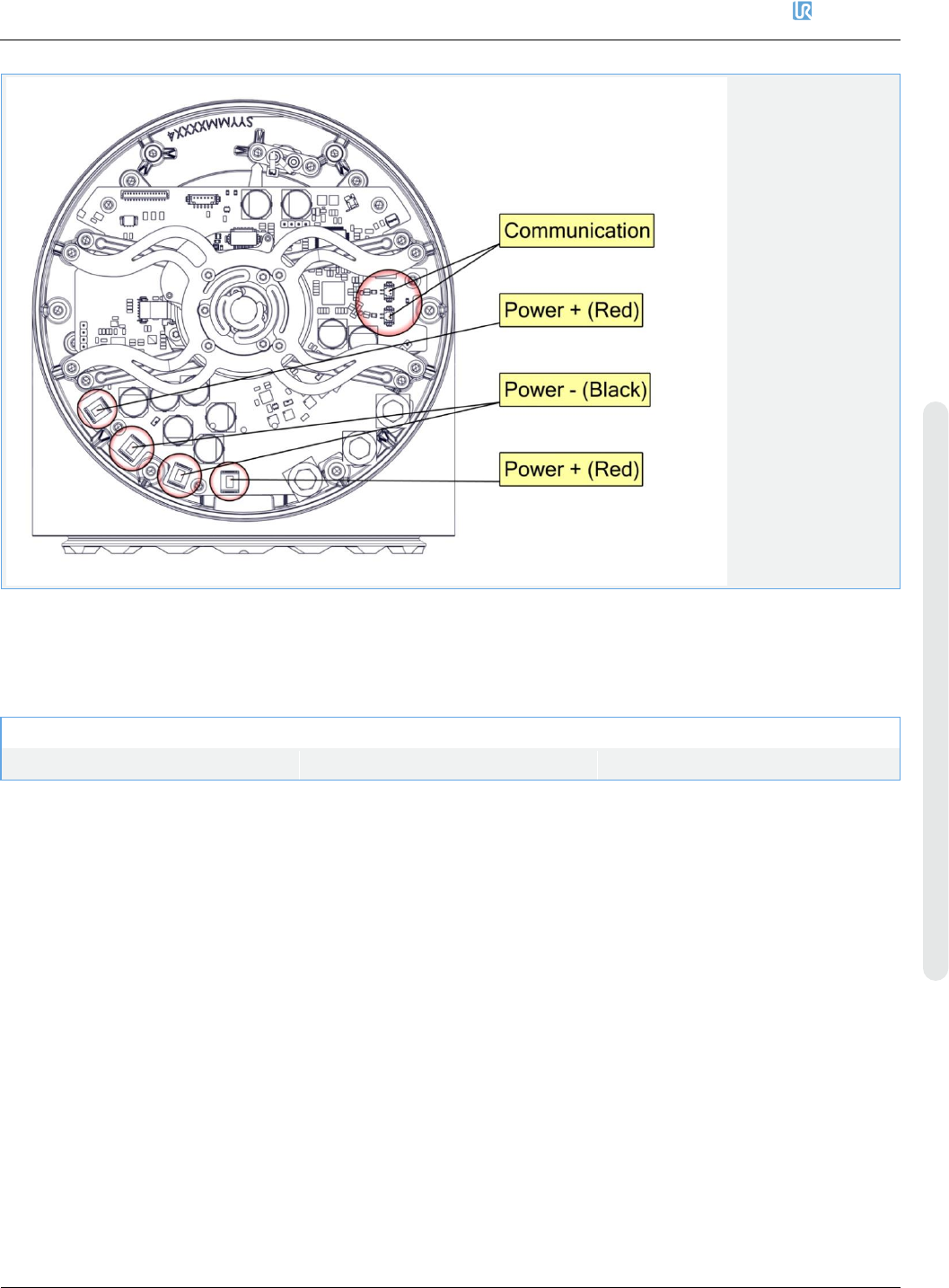
“关节上的电源和通信连接器类型”和“关节上的连接器位置”中所述,轻轻地从端子上拆
下电源和通信线。
3. 可以用小平头螺丝刀推出扁型环。
然后将扁型环滑过关节。