e-Series_Service_Manual_CN.pdf - 第76页
优傲机器人 6. 故障排除 维修手册 70 维修手册 版权 © 2009 – 2020 优傲机器人公 司版权所有。保留所有权利。 C4A2 与安全控制板 A uP 之间的 通信丢失 a) 检查主机板与安全控制 板 之间的 TCP/IP 连接 。 b) 执行完整的重启序列。 c) 更换安全控制板 C4A3 与安全控制板 B uP 之间的 通信丢失 a) 检查主机板与安全控制 板 之间的 TCP/IP 连接 。 b) 执行完整的重启序列。 …
6. 故障排除
优傲机器人
维修手册
69
维修手册
版权 © 2009–2020 优傲机器人公司版权所有。保留所有权利。
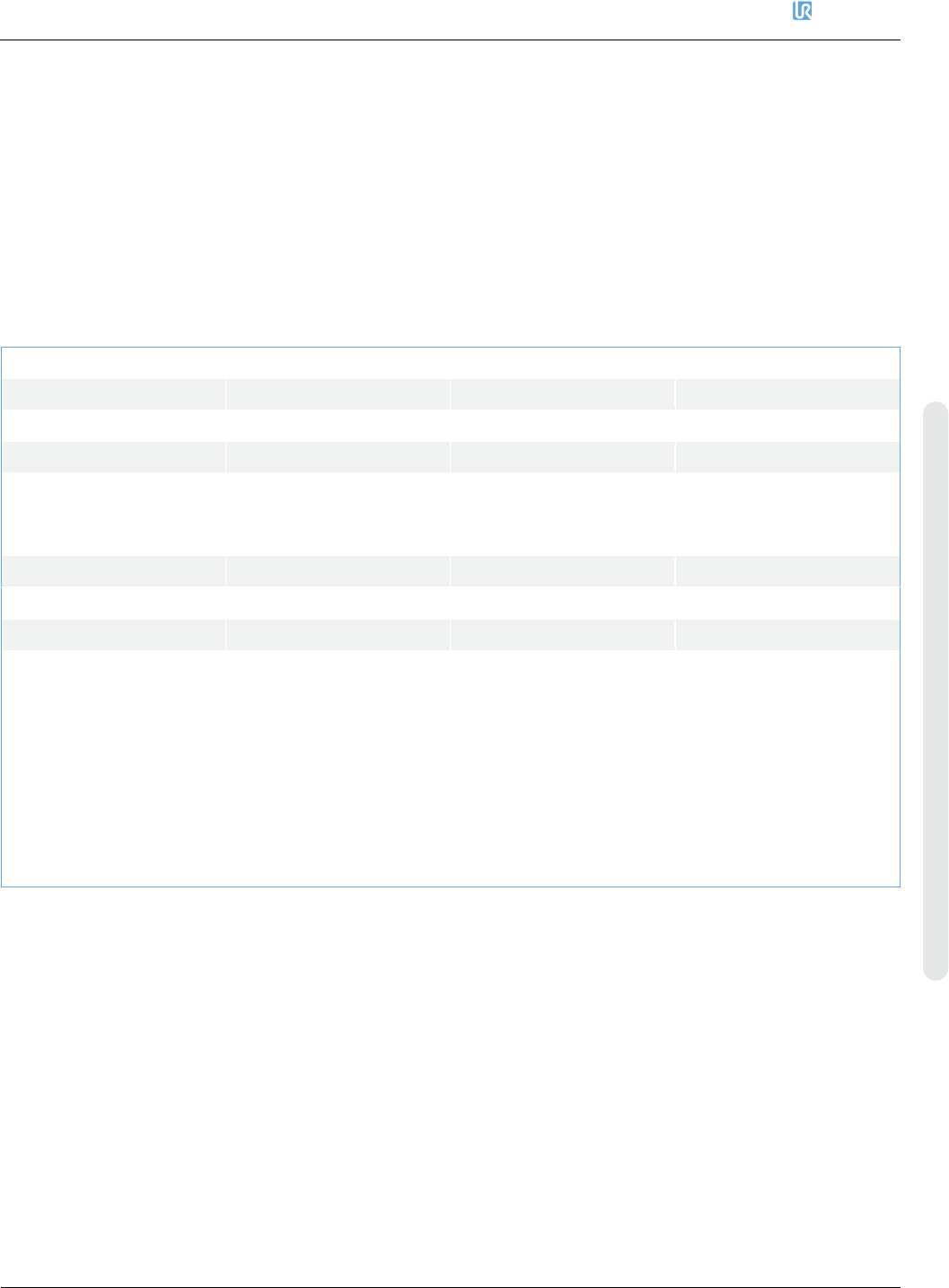
6.3. 错误代码
在错误代码中,多个术语用于同一个组件和代码,直到 C271 在机器人世代之间共享。
⚫ 在安全控制板上:处理器 A = A uP = SafetySys1
⚫ 在安全控制板上:处理器 B = B uP = SafetySys2
⚫ PSU = 电源
⚫ PC = 控制器
错误代码
描述
说明
建议
C0A
无错误
C1A
输出缓冲器过流
C1A1
存储警告的缓冲器过流
C1A2
RS485 的输出缓冲器过
流(控制器 消息出 现问
题)
C2A
输入缓冲器过流
C3A
处理器过载
C4A
通信问题
C4A1
与控制器的通信中断。
安全控制板 与主机 板之
间
a) 检查安全控制板与
主机板之间的网线,
检查脚本或UR+ 软
件是否使安全控制
板与主机板之间的
通信过载。
b) 执行完整的重启序
列。
c) 更新软件
优傲机器人
6. 故障排除
维修手册
70
维修手册
版权 © 2009–2020 优傲机器人公司版权所有。保留所有权利。
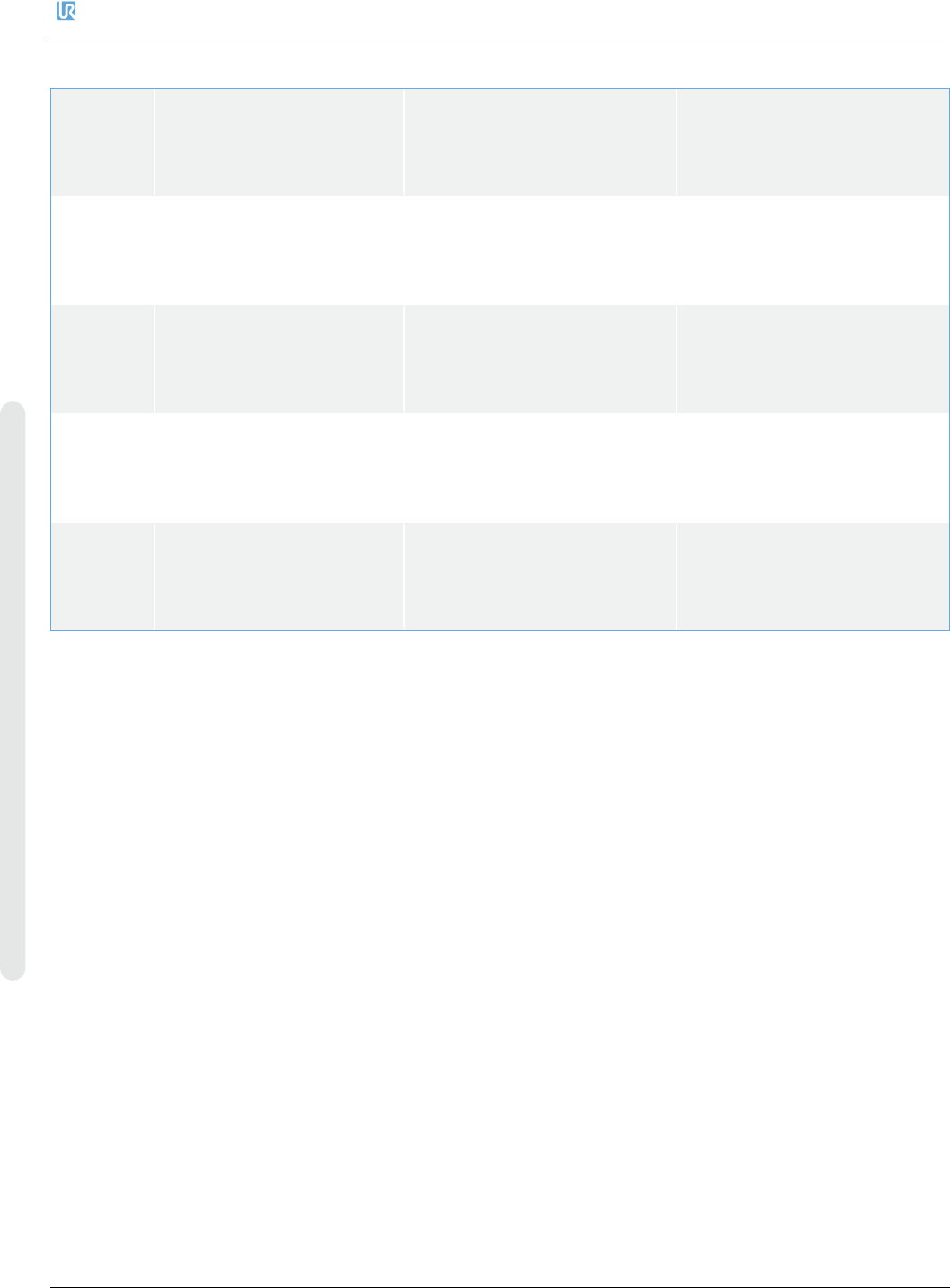
C4A2
与安全控制板 A uP 之间的
通信丢失
a) 检查主机板与安全控制板
之间的TCP/IP连接。
b) 执行完整的重启序列。
c) 更换安全控制板
C4A3
与安全控制板 B uP 之间的
通信丢失
a) 检查主机板与安全控制板
之间的 TCP/IP 连接。
b) 执行完整的重启序列。
c) 更换安全控制板
C4A4
与主示教器 uP 之间的通信
丢失
a) 检查主机板与示教器之间
的 RS485-12V 连接。
b) 执行完整的重启序列。
c) 更换示教器
C4A5
与辅助示教器 uP 之间的通
信丢失
a) 检查主机板与示教器之间
的 RS485-12V 连接。
b) 执行完整的重启序列。
c) 更换示教器
C4A6
与主 EUROMAP67 uP 之间
的通信丢失
a) 检查主机板与示教器之间
的 Euromap67 连接。
b) 执行完整的重启序列。
c) 更换示教器
6. 故障排除
优傲机器人
维修手册
71
维修手册
版权 © 2009–2020 优傲机器人公司版权所有。保留所有权利。
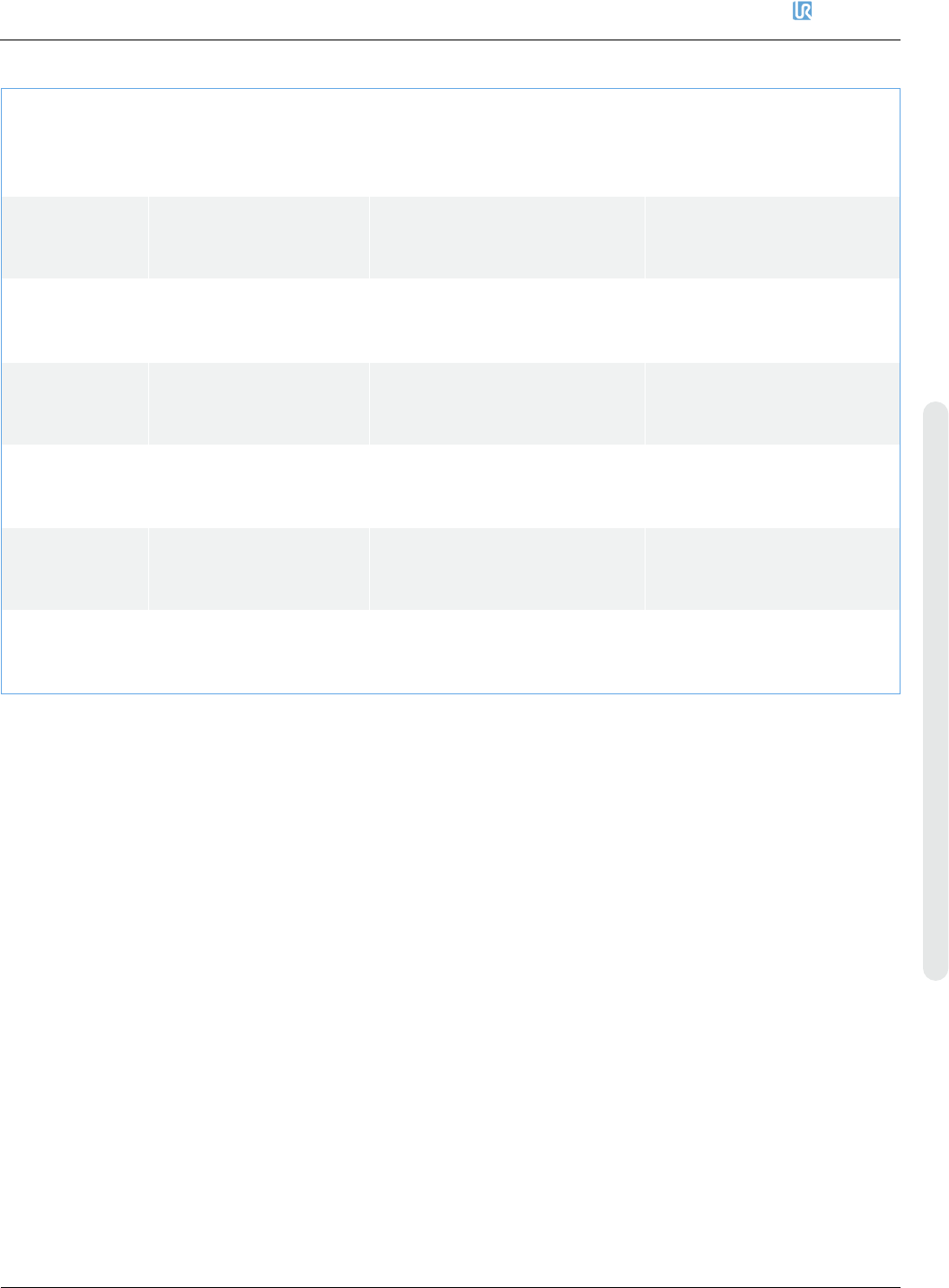
C4A7
与 辅 助 EUROMAP67
uP 之间的通信丢失
a) 检查主机板与示教器之
间的 Euromap67 连接。
b) 执行完整的重启序列。
c) 更换示教器
C4A8
主 EUROMAP67 uP 存
在,但 euromap67 被禁
用
安全配置不正确
a) 更新安全配置中的其他
设置。
b) 执行完整的重启序列
C4A9
辅助 EUROMAP67 uP
存在,但 euromap67 被
禁用
安全配置不正确
a) 更新安全配置中的其他
设置。
b) 执行完整的重启序列
C4A10
主示教器存在,但示教器
安全被禁用
安全配置不正确
a) 更新安全配置中的其他
设置。
b) 执行完整的重启序列
C4A11
辅助示教器 uP 存在,但
示教器安全被禁用
安全配置不正确
a) 更新安全配置中的其他
设置。
b) 执行完整的重启序列
C4A12
与关节 0 之间的通信丢
失
不止 1 个数据包丢失
a) 验证通信电缆的连接是
否正确。
b) 执行完整的重启序列
C4A13
与关节 1 之间的通信丢
失
不止 1 个数据包丢失
a) 验证通信电缆的连接是
否正确。
b) 执行完整的重启序列