e-Series_Service_Manual_CN.pdf - 第40页
优傲机器人 4. 维修和更换零件 维修手册 34 维修手册 版权 © 2009 – 2020 优傲机器人公 司版权所有。保留所有权利。 4.2.10. 关节验证 更换关节时, 它需 要 由控制 器进行验证,以分配正 确的 ID 。机械臂首次通电时,以 下步骤会自动出现。 1. 转到初始化界面并按 “ O N (开启) ” 2. 会出现一个弹出窗口, 提示关节需要验证。按 “Ch eck (检查) ” 确认弹出消息 3. 按 “T est…
4. 维修和更换零件
优傲机器人
维修手册
33
维修手册
版权 © 2009–2020 优傲机器人公司版权所有。保留所有权利。
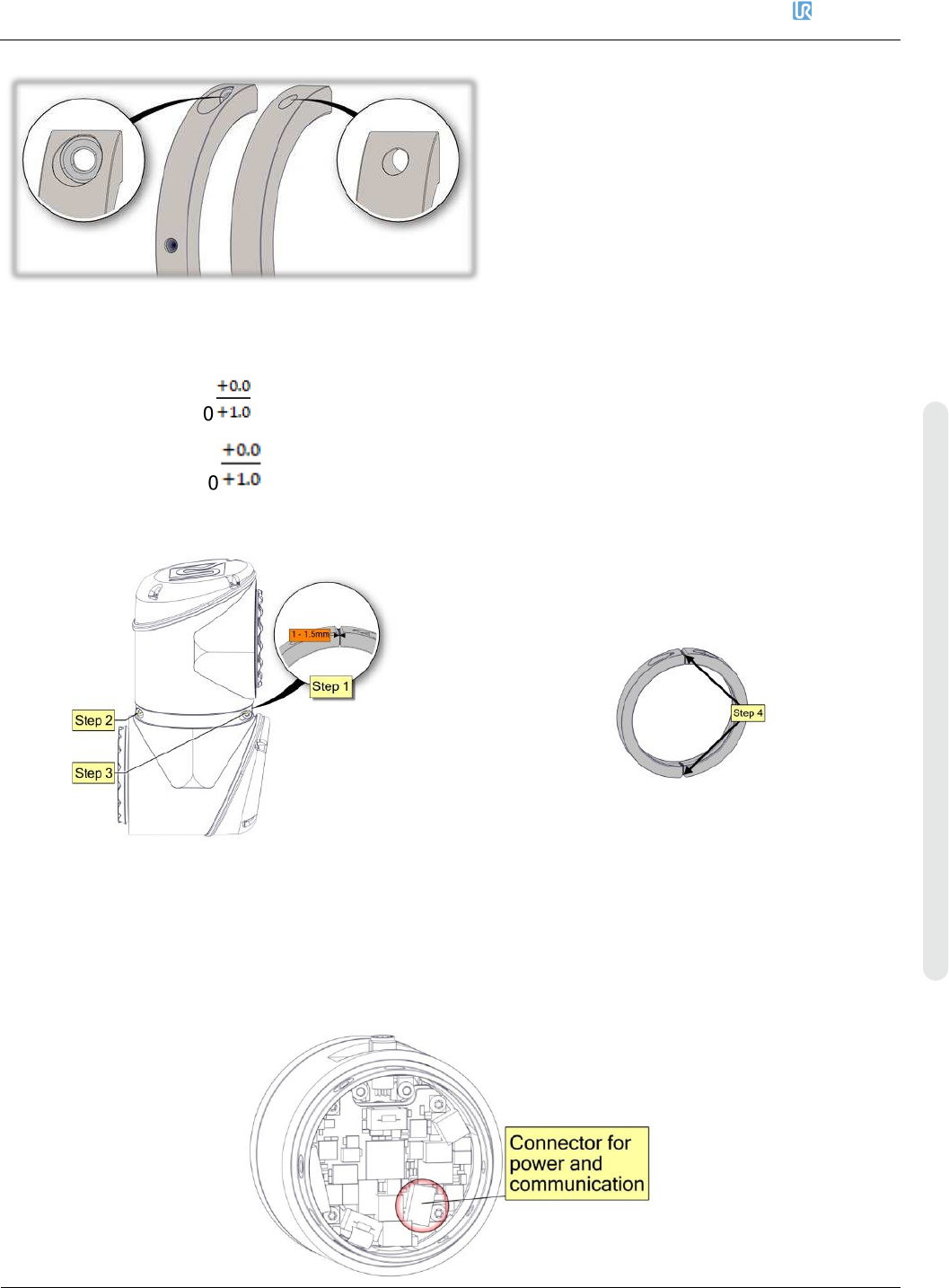
拧紧支架时,必须分步骤进行。不要超过建议的扭矩:
⚫ 第 1 步:拧紧一侧,使间隙为 1.0mm 至 1.5mm。
⚫ 第 2 步:用 5.0
Nm 的扭矩完全拧紧另一侧
⚫ 第 3 步:用 5.0
Nm 的扭矩拧紧初始侧
⚫ 第 4 步:确保两端的间隙相同。
4.2.9. 工具法兰
工具法兰是一种螺纹连接,其拆卸方式与螺纹连接关节的拆卸方式一样。
参见
螺纹连接章节
电源插头和通信插头在同一个插头里。
优傲机器人
4. 维修和更换零件
维修手册
34
维修手册
版权 © 2009–2020 优傲机器人公司版权所有。保留所有权利。
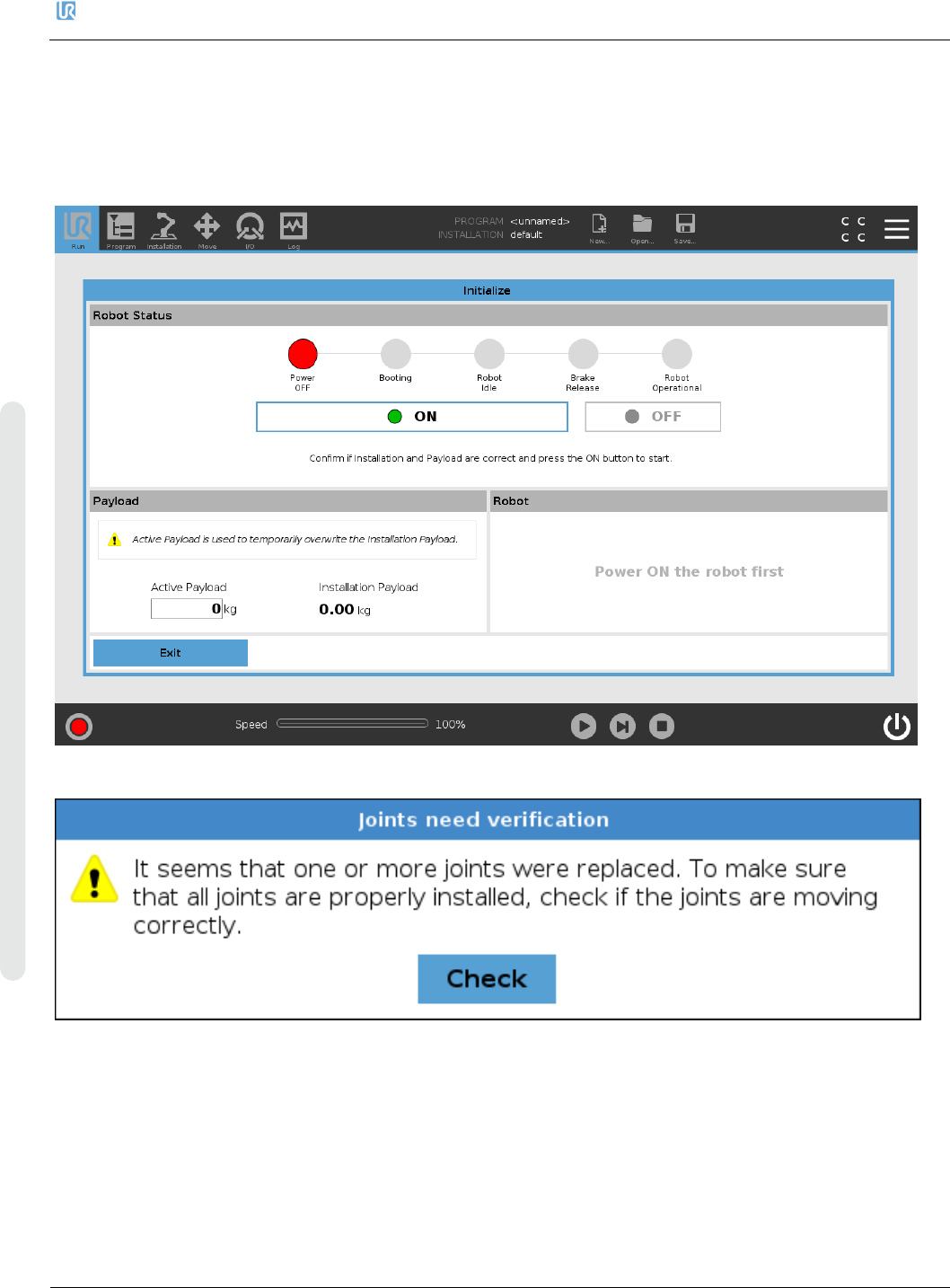
4.2.10. 关节验证
更换关节时,它需要由控制器进行验证,以分配正确的 ID。机械臂首次通电时,以下步骤会自动出现。
1. 转到初始化界面并按“ON(开启)”
2. 会出现一个弹出窗口,提示关节需要验证。按“Check(检查)”确认弹出消息
3. 按“Test Joints(测试关节)”开始关节验证。
4. 维修和更换零件
优傲机器人
维修手册
35
维修手册
版权 © 2009–2020 优傲机器人公司版权所有。保留所有权利。
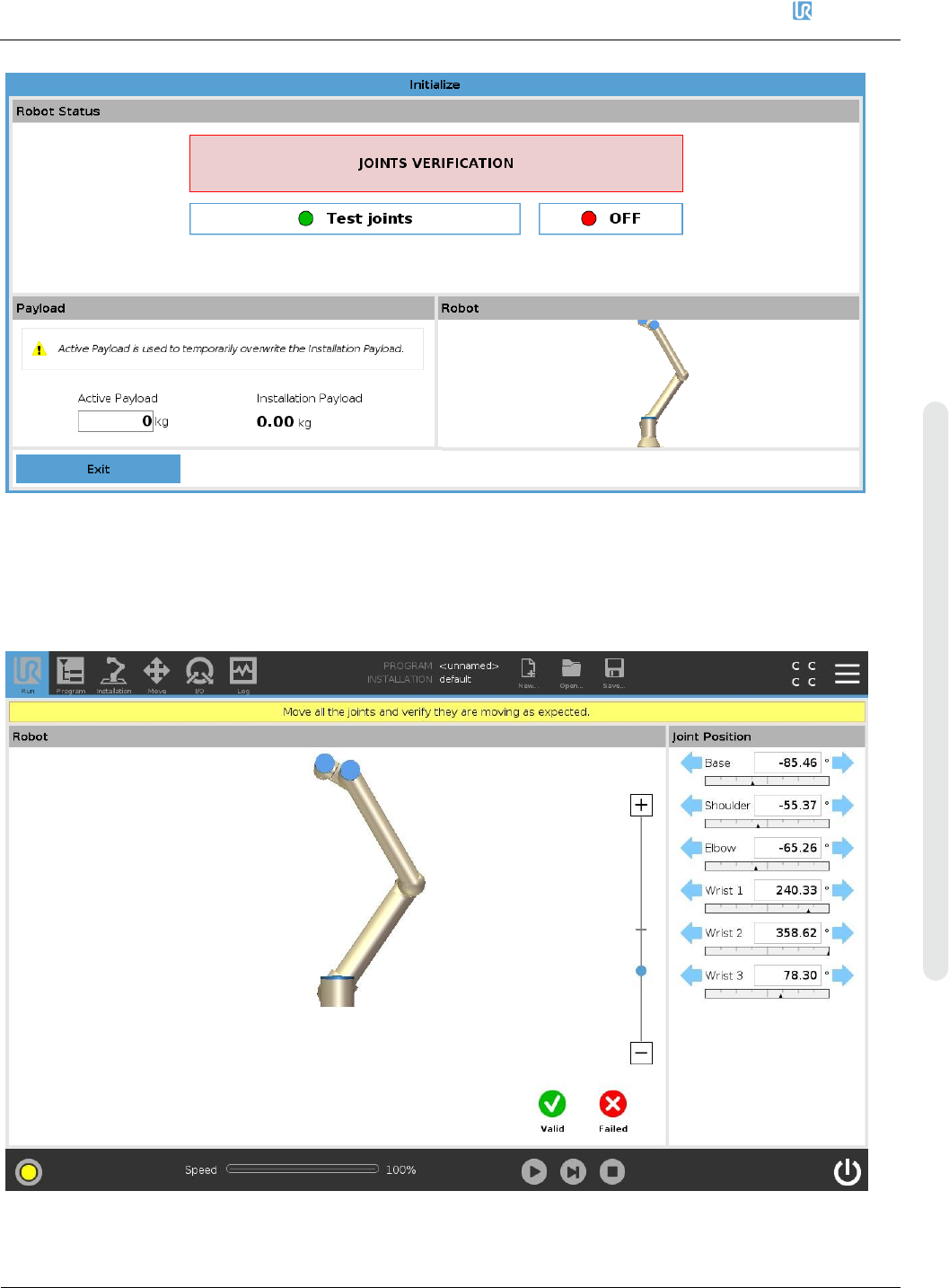
4. 用分别指向每个关节的箭头移动所有关节。
1. 如果关节按预期移动,按下“Valid(有效)”,弹出窗口就会出现。按照弹出的说明操作。
2. 如果关节未按预期移动(即关节移动错误或方向不正确),则可按下“Failed(失败)”,即
会弹出新的窗口。按照弹出的说明操作。