e-Series_Service_Manual_CN.pdf - 第23页
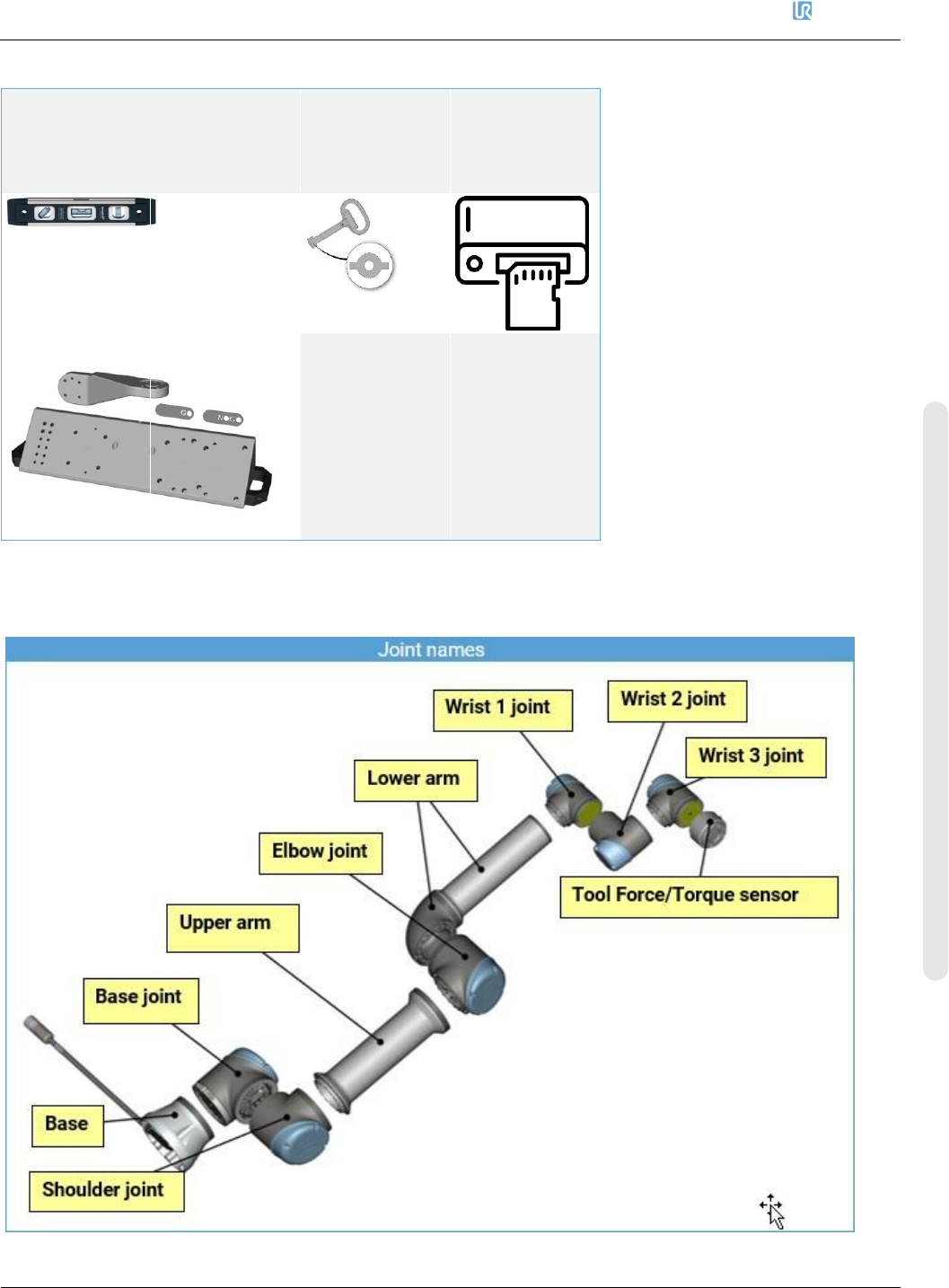
4. 维修和更换零件 优傲 机器人 维修手册 17 维修手册 版权 © 2009 – 2020 优傲机器人公 司版权所有。保留所有权利。 水准仪 或 双 机 械 臂 校 准 工 具 零 件 编 号 : 185500 控制柜钥匙 (双位钥匙) SD 卡读卡器 4.2. 机械臂
优傲机器人
4. 维修和更换零件
维修手册
16
维修手册
版权 © 2009–2020 优傲机器人公司版权所有。保留所有权利。
4. 维修和更换零件
4.1. 使用前评估
检查所有安全输入和输出的连接是否正确。测试连接的所有安全输入和输出,包括多台机器或机器人共
用的设备是否正常工作。在首次使用机器人前或进行任何改装后,必须进行以下测试:
⚫ 测试紧急停止按钮。检查机器人是否停止,制动器是否啮合。
⚫ 测试安全输入能否停止机器人的移动。如果配置了安全复位,则要确认是否要在恢复运动之前
必须激活。
⚫ 测试安全边界,确保“减速模式”可以切换至安全模式并返回。
⚫ 测试“操作模式”开关(如果已连接),观察用户界面右上角的图标,确保模式正在改变。
⚫ 测试三档位开关(如已连接),使其在手动模式下运动,并测试机器人是否处于减速控制状态
。
⚫ 测试系统急停输出是否能使整个系统进入安全状态。
⚫ 测试连接到“机器人移动输出”、“机器人不停止输出”、“缩减模式输出”、或“非缩减模式输出”的系
统能否检测到输出变化。
阅读第9节,了解如何包装和运输机器人和/或备件。
机器人/备件的包装和运输
4.1.1. 建议使用工具
机械臂
控制箱
维修工具 – 零件编号:109011
维修工具 – 零件编号:109011
4. 维修和更换零件
优傲机器人
维修手册
17
维修手册
版权 © 2009–2020 优傲机器人公司版权所有。保留所有权利。
水准仪
或
双 机 械 臂 校 准 工 具 零 件 编 号 :
185500
控制柜钥匙
(双位钥匙)
SD 卡读卡器
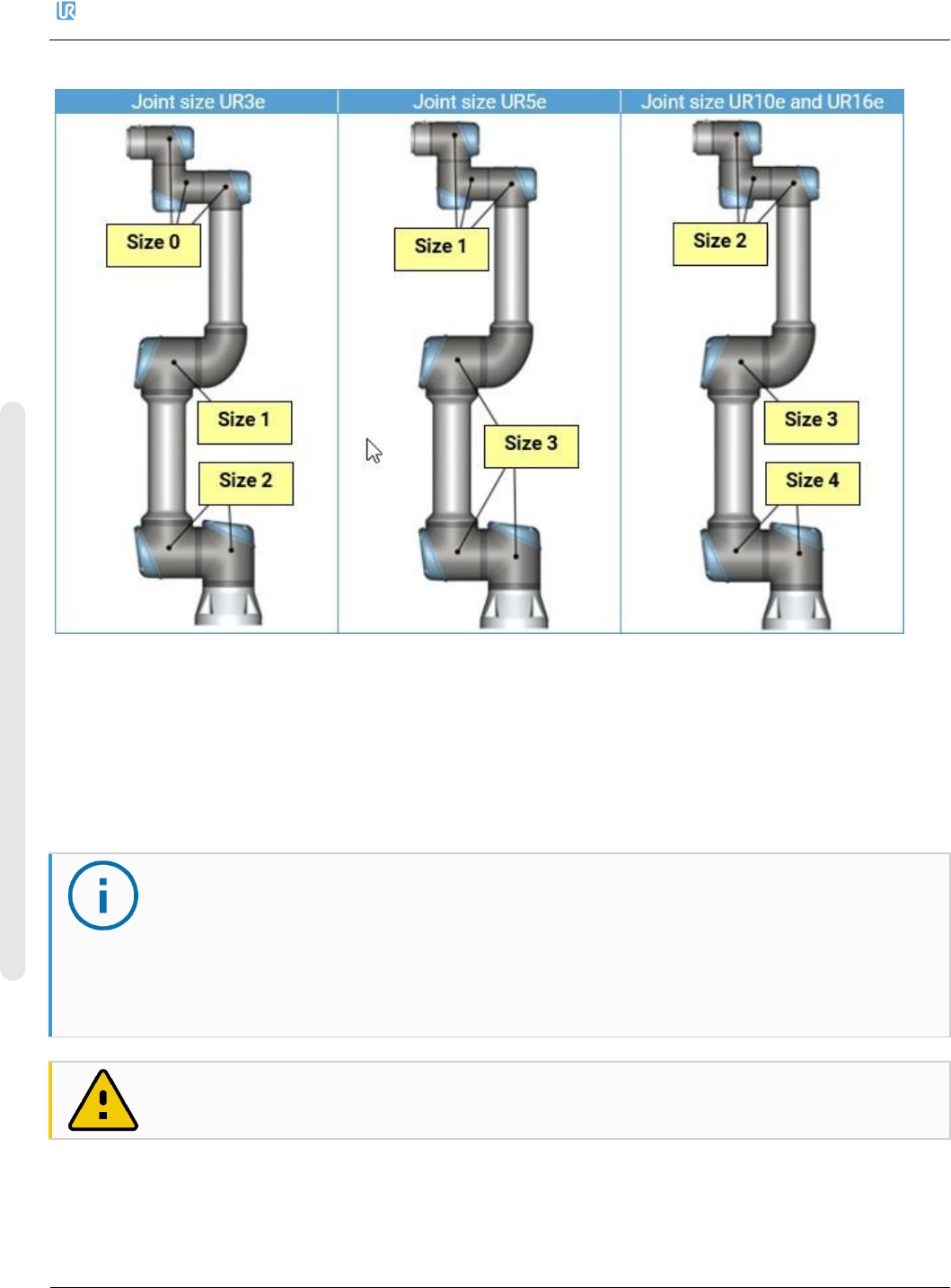
4.2. 机械臂
优傲机器人
4. 维修和更换零件
维修手册
18
维修手册
版权 © 2009–2020 优傲机器人公司版权所有。保留所有权利。
4.2.1. 无驱动力移动
发生紧急情况时,如果机器人电源不可用或不需要时,在可使用强制反向驱动,如果不可用,也可以联
系您的优傲机器人经销商。
进行强制反向驱动时,必须用力推或拉动机械臂,以移动关节。每个关节制动器都有一个摩擦离合器,
可以使机器人在高强制扭矩下移动。
注意
手动移动机械臂仅限于紧急状况和维修目的。
每个关节内部的制动器不是为手动释放而设计。如果未经过适当的培训就想这样做,则可能
损坏制动器和其他关节组件。这将使关节无法使用。
不要过度移动关节。
移动不能超过160度,确保机器人能找到原来的物理位置。
小心
手动释放关节制动器可能会导致人员受伤或设备损坏。