从单片机基础到程序框架(全集 2019pdf版).pdf - 第379页
断函 数才算 完美 齐全, 这个 中断 函数提 供系 统的节 拍时 间, 以及处 理扫 描一些 跟 I O 口消抖动 相关 的函 数, 以及跟蜂鸣 器驱动相关的 函数。 【88.2 switch 外加定时中断。 】 提出“sw itch 外加定时中 断”理论,主要 方便初 学者理解单片 机程序大概的 “逻辑框架 ” 。 switch 是一 个万能语句, 它外加 w hile 与 for 循环就可以 做任何 复杂的算法, 比如 , 搜索 …
第八十八节: 两大核心框架理论(四区一线,switch 外加定时中断)。
【88.1 四区一线。】
提出“四区一线”理论,主要方便初学者理解单片机程序大概的“空间分区”。
“四区”代表四大主流函数,分别是:系统初始化函数,外设初始化函数,主程序的任务函数,定时中
断函数。
“一线”是指“系统初始化函数”与“外设初始化函数”的“分割线”,这个“分割线”是一个 delay
的延时函数。
“四区一线”的布局如下:
void main()
{
SystemInitial(); //“四区一线”的“第一区”
Delay(10000); //“四区一线”的“一线”
PeripheralInitial(); //“四区一线”的“第二区”
while(1) //主循环
{
LedTask(); //“四区一线”的“第三区”
KeyTask(); //“四区一线”的“第三区”
UsartTask(); //“四区一线”的“第三区”
... //凡是在主循环里的函数都是属于“第三区”
}
}
void T0_time() interrupt 1 //“四区一线”的“第四区”
{
}
“第一区”的函数 SystemInitial(),是一个系统的初始化函数,专门用来初始化单片机自己的寄存器
以及个别外围要求响应速度快的输出设备,防止刚上电之后,由于输出 IO 口电平状态不确定而导致外围设
备误动作,比如驱动继电器的误动作等等。
“一线”的函数 Delay(10000),是一个延时函数,为什么这里要插入一个延时函数?主要目的是为接下
来的 PeripheralInitial()做准备的。上电后先延时一段时间,再执行 PeripheralInitial()函数,因为
PeripheralInitial()函数专门用来初始化不要求上电立即处理的外设芯片和模块。比如液晶模块,AT24C02
存储芯片,DS1302 时钟芯片,等等。这些芯片在上电的瞬间,内部自身的复位需要一点时间,以及外部电压
稳定也需要一点时间,只有过了这一点时间,这些芯片才处于正常的工作状态,这个时候单片机才能跟它正
常通信,所以“一线”函数 Delay(10000)的意义就在这里。
“第二区”的函数 PeripheralInitial(),是一个外设的初始化函数。专门用来初始化不要求上电立即
处理的外设芯片和模块。
“第三区”的函数 LedTask(),KeyTask(),UsartTask(),等等,是一些在主循环里不断扫描的任务函
数。
“第四区”的函数 void T0_time() interrupt 1,是一个定时中断函数,一个系统必须标配一个定时中
断函数才算完美齐全,这个中断函数提供系统的节拍时间,以及处理扫描一些跟 IO 口消抖动相关的函数,
以及跟蜂鸣器驱动相关的函数。
【88.2 switch 外加定时中断。】
提出“switch 外加定时中断”理论,主要方便初学者理解单片机程序大概的“逻辑框架”。
switch 是一个万能语句,它外加 while 与 for 循环就可以做任何复杂的算法,比如,搜索算法,运动算
法,提取关键词算法,等等。它外加定时中断,就可以搭建一个系统的基本框架。比如,做通信的程序框架,
人机界面的程序框架,按键服务的程序框架,等等。switch 的精髓在于“根据条件进行步骤的灵活切换”。
具体内容请看本节的练习程序。
【88.3 练习例程。】
根据上述的两大核心框架理论,编写 1 个 LED 灯闪烁的程序。
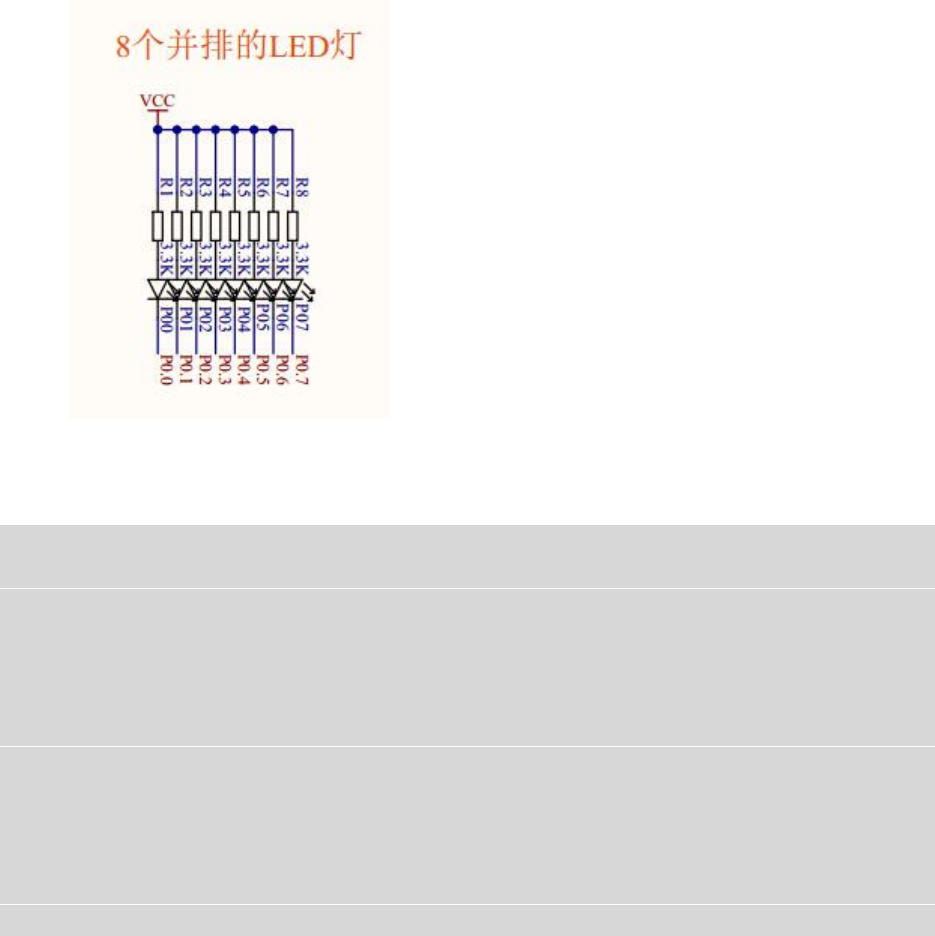
图 88.3.1 灌入式驱动 8 个 LED
#include "REG52.H"
void T0_time();
void SystemInitial(void) ;
void Delay(unsigned long u32DelayTime) ;
void PeripheralInitial(void) ;
void LedTask(void);
#define BLINK_TIME_1 1000
sbit P0_0=P0^0;
volatile unsigned char vGu8TimeFlag_1=0;
volatile unsigned int vGu16TimeCnt_1=0;
void main()
{
SystemInitial(); //“四区一线”的“第一区”
Delay(10000); //“四区一线”的“一线”
PeripheralInitial(); //“四区一线”的“第二区”
while(1) //主循环
{
LedTask(); //“四区一线”的“第三区”
}
}
void T0_time() interrupt 1 //“四区一线”的“第四区”
{
if(1==vGu8TimeFlag_1&&vGu16TimeCnt_1>0)
{
vGu16TimeCnt_1--;
}
TH0=0xfc;
TL0=0x66;
}
void SystemInitial(void)
{
TMOD=0x01;
TH0=0xfc;
TL0=0x66;
EA=1;
ET0=1;
TR0=1;
}
void Delay(unsigned long u32DelayTime)
{
for(;u32DelayTime>0;u32DelayTime--);
}
void PeripheralInitial(void)
{
}