从单片机基础到程序框架(全集 2019pdf版).pdf - 第385页
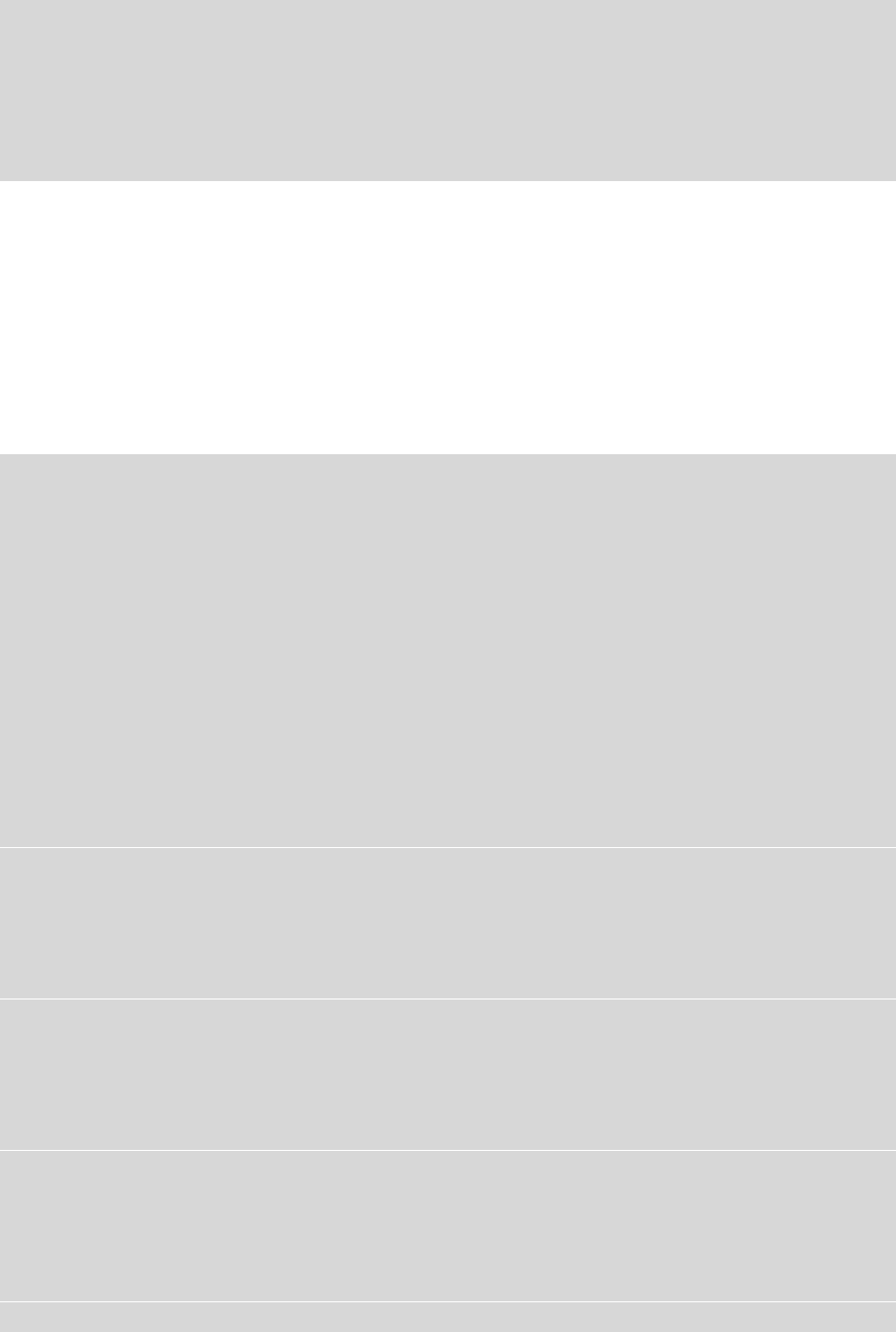
} TH0=0xfc ; TL0=0x66 ; } void Syste mInitial( void) { TMOD=0x01; TH0=0xfc; TL0=0x66; EA=1; ET0=1; TR0=1; } void Delay (unsigned l ong u32Delay Time) { for(;u32 DelayTime>0 ;u32DelayT ime--); } void Perip heralInit ia…
{
Su8Cnt=0;
Su8Data=0x01; //重新赋初值,继续下一次循环移动
}
}
分析总结:这是第 1 种境界的跑马灯,这种思路虽然实现了跑马灯的效果,但是因为“阻塞延时”,整
个程序显得僵硬机械,缺乏多任务并行的框架。
【89.3 移位非阻塞。】
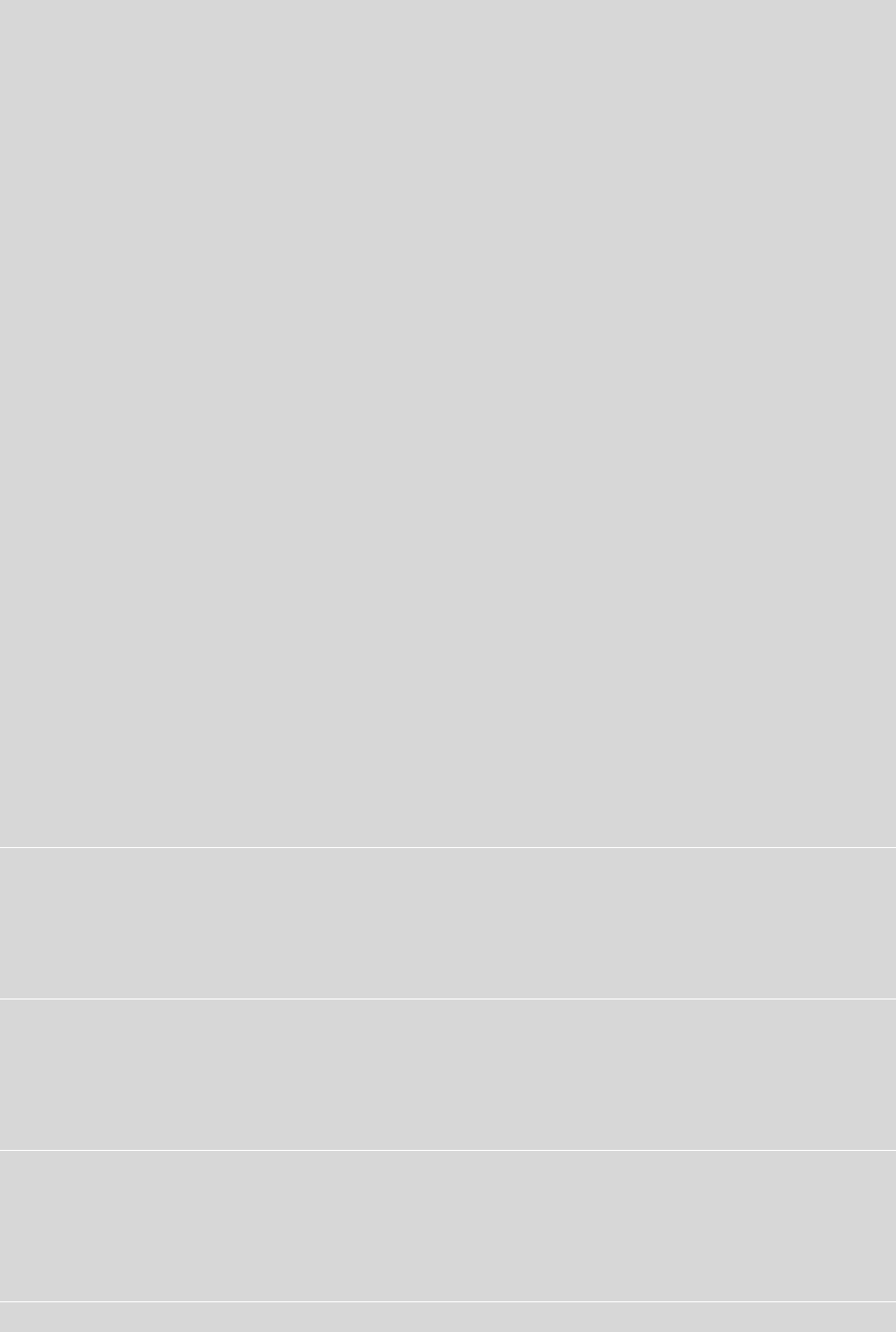
移位非阻塞,“移位”用的是 C 语言的左移或者右移语句,“非阻塞”用的是定时中断衍生出来的软件定
时器。代码如下:
#include "REG52.H"
void T0_time();
void SystemInitial(void) ;
void Delay(unsigned long u32DelayTime) ;
void PeripheralInitial(void) ;
void LedTask(void);
#define BLINK_TIME_1 1000
volatile unsigned char vGu8TimeFlag_1=0;
volatile unsigned int vGu16TimeCnt_1=0;
void main()
{
SystemInitial();
Delay(10000);
PeripheralInitial();
while(1)
{
LedTask();
}
}
void T0_time() interrupt 1
{
if(1==vGu8TimeFlag_1&&vGu16TimeCnt_1>0) //软件定时器
{
vGu16TimeCnt_1--;
}
TH0=0xfc;
TL0=0x66;
}
void SystemInitial(void)
{
TMOD=0x01;
TH0=0xfc;
TL0=0x66;
EA=1;
ET0=1;
TR0=1;
}
void Delay(unsigned long u32DelayTime)
{
for(;u32DelayTime>0;u32DelayTime--);
}
void PeripheralInitial(void)
{
}
//跑马灯的任务程序
void LedTask(void)
{
static unsigned char Su8Data=0x01; //加 static 修饰的局部变量,每次进来都会保留上一次值。
static unsigned char Su8Cnt=0; //加 static 修饰的局部变量,每次进来都会保留上一次值。
if(0==vGu16TimeCnt_1) //时间到
{
vGu8TimeFlag_1=0;
vGu16TimeCnt_1=BLINK_TIME_1; //重装定时的时间
vGu8TimeFlag_1=1;
P0=Su8Data; //Su8Data 的 8 个位代表 8 个 LED 的状态,0 为点亮,1 为熄灭。
Su8Data=Su8Data<<1; //左移一位
Su8Cnt++; //计数器累加 1
if(Su8Cnt>=8) //移位大于等于 8 次后,重新赋初值
{
Su8Cnt=0;
Su8Data=0x01; //重新赋初值,继续下一次循环移动
}
}
}
分析总结:这是第 2 种境界的跑马灯,这种思路虽然实现了跑马灯的效果,也用到了多任务并行处理的
基本元素“软件定时器”,但是因为还停留在“移位”语句的阶段,此时的程序并没有超越跑马灯本身,跑
马灯还是跑马灯,处于“看山还是山”的境界。
【89.4 状态切换非阻塞。】
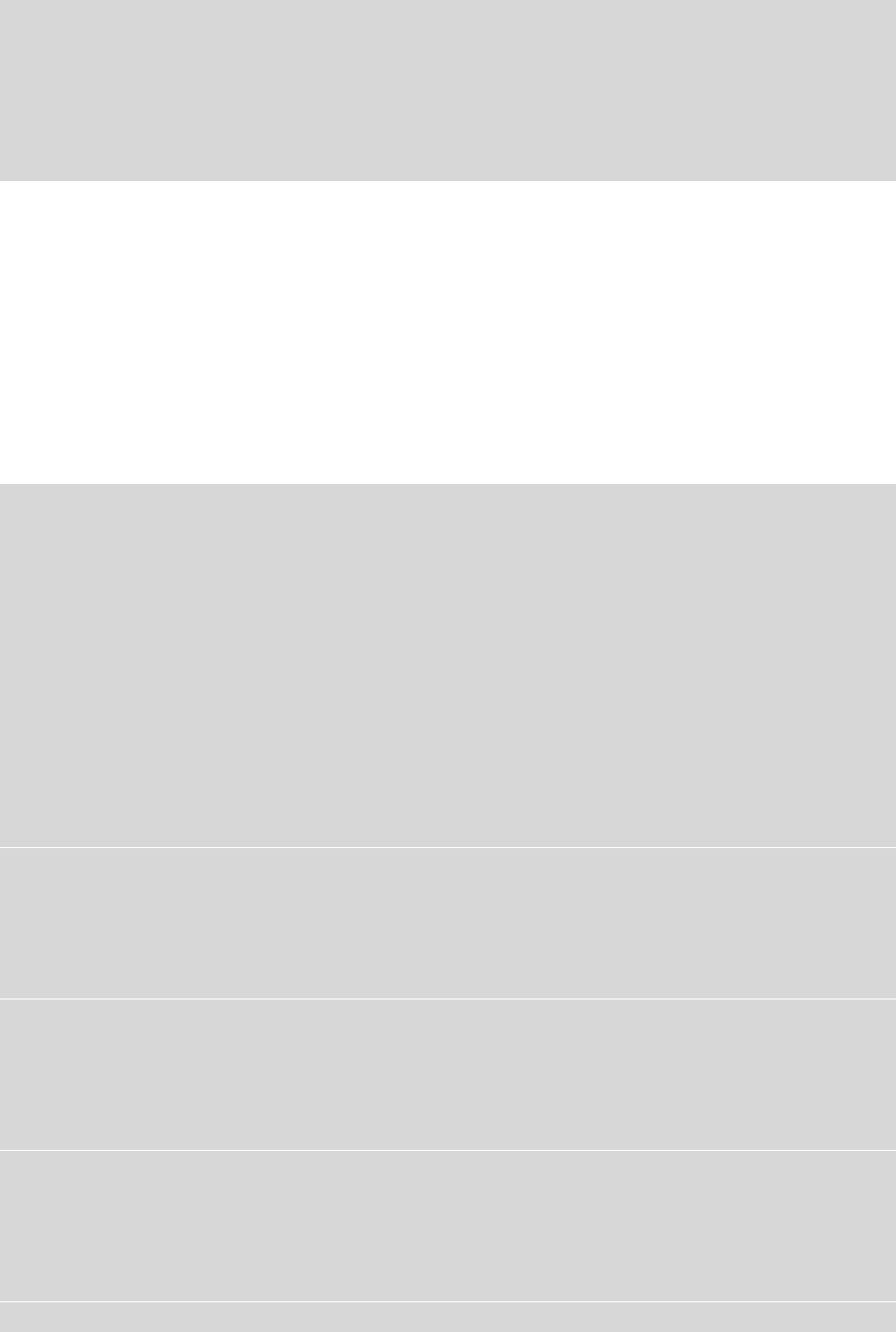
状态切换非阻塞,“状态切换”用的是 switch 语句中根据特定条件进行步骤切换,“非阻塞”用的是定
时中断衍生出来的软件定时器。代码如下:
#include "REG52.H"
void T0_time();
void SystemInitial(void) ;
void Delay(unsigned long u32DelayTime) ;
void PeripheralInitial(void) ;
void LedTask(void);
#define BLINK_TIME_1 1000
sbit P0_0=P0^0;
sbit P0_1=P0^1;
sbit P0_2=P0^2;
sbit P0_3=P0^3;
sbit P0_4=P0^4;
sbit P0_5=P0^5;
sbit P0_6=P0^6;
sbit P0_7=P0^7;
volatile unsigned char vGu8TimeFlag_1=0;
volatile unsigned int vGu16TimeCnt_1=0;
void main()
{
SystemInitial();
Delay(10000);
PeripheralInitial();
while(1)