从单片机基础到程序框架(全集 2019pdf版).pdf - 第403页
void Perip heralInit ial(void) ; void BeepO pen(void) ; //蜂鸣器发声 void BeepC lose(void ); //蜂鸣器关闭 void Voice Scan(void ); //蜂鸣器的驱动函数 ,放在 定时中断里 sbit P3_4= P3^4; //控制蜂鸣器 的 IO 口。0 代表 发声,1 代表 关闭。 volatile u nsigned c har vGu8B…
第九十一节: 蜂鸣器的“非阻塞”驱动。
【91.1 蜂鸣器的硬件电路简介。】
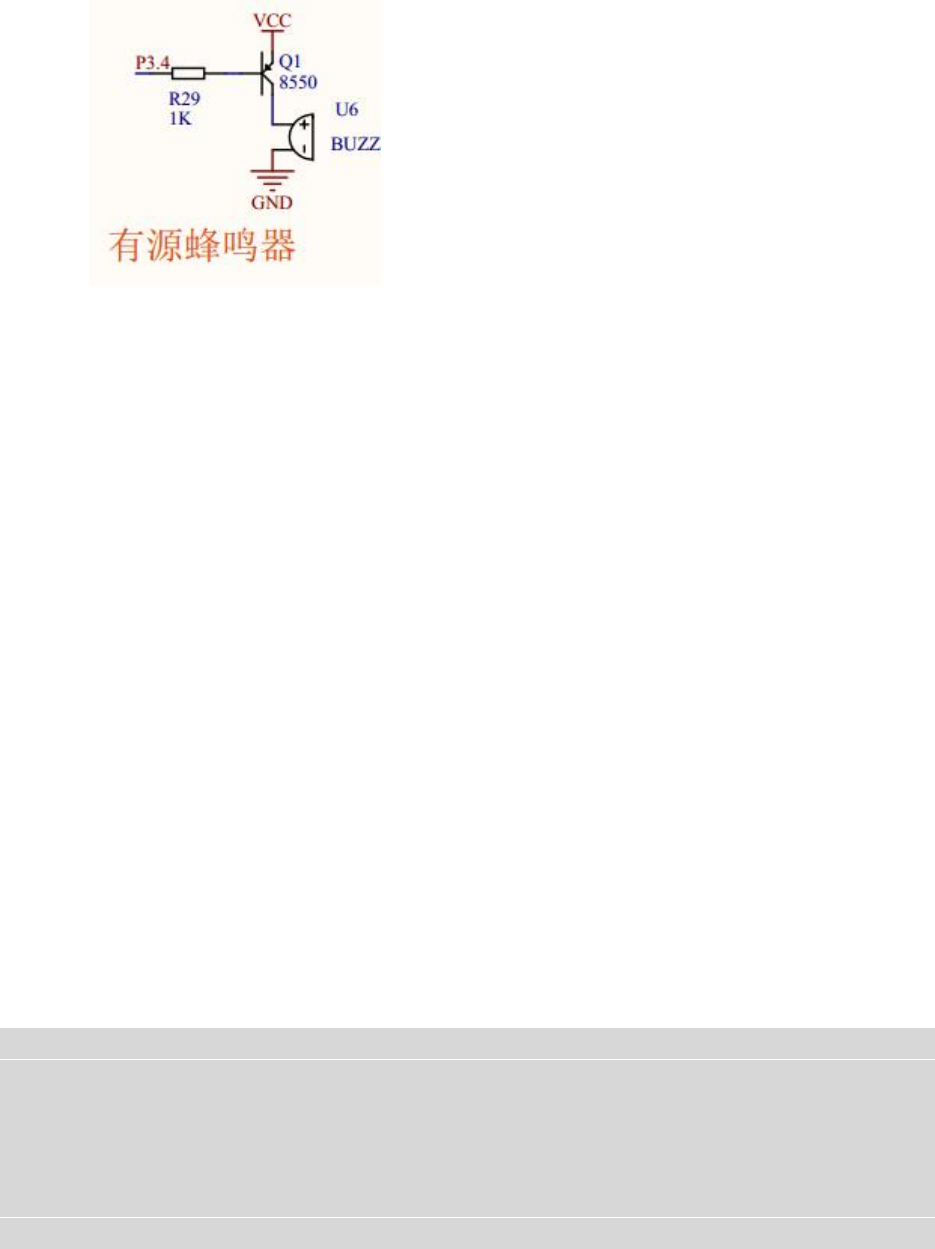
上图 91.1.1 PNP 三极管驱动有源蜂鸣器
蜂鸣器有两种,一种是有源蜂鸣器,一种是无源蜂鸣器。有源蜂鸣器的驱动最简单,只要通电就一直响,
断电就停,跟驱动 LED 灯一样。无源蜂鸣器则不一样,无源蜂鸣器一直断电不响,奇怪的是一直通电也不响,
只有“通,关,通,关...”反复通电关电的状态,才会持续发生稳定的声音,此方式称为脉冲驱动方式,
或者 PWM 驱动方式。本教程用的是有源蜂鸣器。
蜂鸣器的驱动电路也有两种常用的方式,一种是 NPN 三极管驱动,一种是 PNP 三极管驱动。NPN 三极管
驱动电路,单片机输出“1”(高电平)蜂鸣器导通,输出“0”(低电平)蜂鸣器关闭。而 PNP 三极管驱动电
路恰恰相反,单片机输出“0”(低电平)蜂鸣器导通,输出“1”(高电平)蜂鸣器关闭。本教程所用的是 PNP
三极管驱动电路,如上图。
【91.2 “非阻塞”驱动程序。】
“驱动层”是相对“应用层”而言。“应用层”发号施令,“驱动层”负责执行。一个好的“驱动层”必
须给“应用层”提供快捷便利的调用接口,此接口可以是函数或者全局变量。本节驱动蜂鸣器所用的是全局
变 量 vGu16BeepTimerCnt 和 vGu8BeepTimerFlag 。“ 应 用 层 ” 只 需 给 vGu16BeepTimerCnt 赋 值 , 给
vGu8BeepTimerFlag 置 1,就可以控制蜂鸣器发声,赋值越大,发声越长,500 代表发声 500ms,1000 代表发
声 1000ms,具体细节实现,则由“驱动层”的驱动函数负责执行,驱动函数放在定时中断函数里定时扫描。
为什么不把驱动函数放到 main 函数的循环里去?因为放在定时中断里,能保证蜂鸣器的声音长度是一致的,
如果放在 main 循环里,声音的长度有可能在某些项目中受到某些必须一气呵成的任务干扰,得不到及时响
应,影响声音长度的一致性。下面代码实现的功能是,单片机只要一上电,蜂鸣器就发出一次 1000ms 长度
的“嘀”声音。
#include "REG52.H"
#define BEEP_TIME 1000 //控制蜂鸣器发声的长度,此处是 1000ms
void T0_time();
void SystemInitial(void) ;
void Delay(unsigned long u32DelayTime) ;
void PeripheralInitial(void) ;
void BeepOpen(void); //蜂鸣器发声
void BeepClose(void); //蜂鸣器关闭
void VoiceScan(void); //蜂鸣器的驱动函数,放在定时中断里
sbit P3_4=P3^4; //控制蜂鸣器的 IO 口。0 代表发声,1 代表关闭。
volatile unsigned char vGu8BeepTimerFlag=0;
volatile unsigned int vGu16BeepTimerCnt=0; //控制蜂鸣器发声长度的计时器
void main()
{
SystemInitial();
Delay(10000);
PeripheralInitial(); //此函数内部有“应用层”的赋值操作,控制上电的声音长度。
while(1)
{
;
}
}
void T0_time() interrupt 1
{
VoiceScan(); //蜂鸣器的驱动函数
TH0=0xfc;
TL0=0x66;
}
void SystemInitial(void)
{
TMOD=0x01;
TH0=0xfc;
TL0=0x66;
EA=1;
ET0=1;
TR0=1;
}
void Delay(unsigned long u32DelayTime)
{
for(;u32DelayTime>0;u32DelayTime--);
}
void PeripheralInitial(void)
{
vGu8BeepTimerFlag=0;
vGu16BeepTimerCnt=BEEP_TIME; //“应用层”只需赋值,一上电,蜂鸣器发出 1000ms 长度的声音。
vGu8BeepTimerFlag=1;
}
//蜂鸣器发声
void BeepOpen(void)
{
P3_4=0; //0 代表发声
}
//蜂鸣器关闭
void BeepClose(void)
{
P3_4=1; //1 代表关闭
}
//蜂鸣器的驱动函数,放在定时中断函数里每定时 1ms 扫描一次。
void VoiceScan(void)
{
//Su8Lock 的作用是避免 BeepOpen()被重复扫描影响效率,发声时只执行一次此函数即可。
//同时,也巧妙借用 else 结构,实现逻辑顺序分解成“先发声,下一次再开始定时”的两个步骤。
static unsigned char Su8Lock=0;
if(1==vGu8BeepTimerFlag&&vGu16BeepTimerCnt>0)
{
if(0==Su8Lock)
{
Su8Lock=1; //进入触发声音后就自锁起来
BeepOpen(); //发声,此处封装成函数,为了今后代码的移植性。
}
else //巧妙借用 else 结构,实现先发声,下一次中断再开始计时的逻辑顺序。比如,
{ //如果赋值 1,就能确保有 1ms 的计时发声。
vGu16BeepTimerCnt--; //定时器自减,控制蜂鸣器发声的时间长度
if(0==vGu16BeepTimerCnt)