Xg系列操作手册.pdf - 第224页
B-7 8 2 . 2 使 用 特 殊 识 别 设 置 用 普 通 的 校 正 类 型 无 法 识 别 时 , 请 使 用 特 殊 识 别 算 法 识 别 。 以 下 具 体 说 明 设 置 方 法 。 2 . 2 . 1 Q F P 识 别 方 式 Q F P 识 别 方 式 中 有 几 种 特 殊 识 别 算 法 。 1 . 算 法 : 特 殊 1〈 特 殊 Q F P 识别 1 〉 如 果 边 端 引 脚 的 检 测 不 稳 定 …
B-6
8
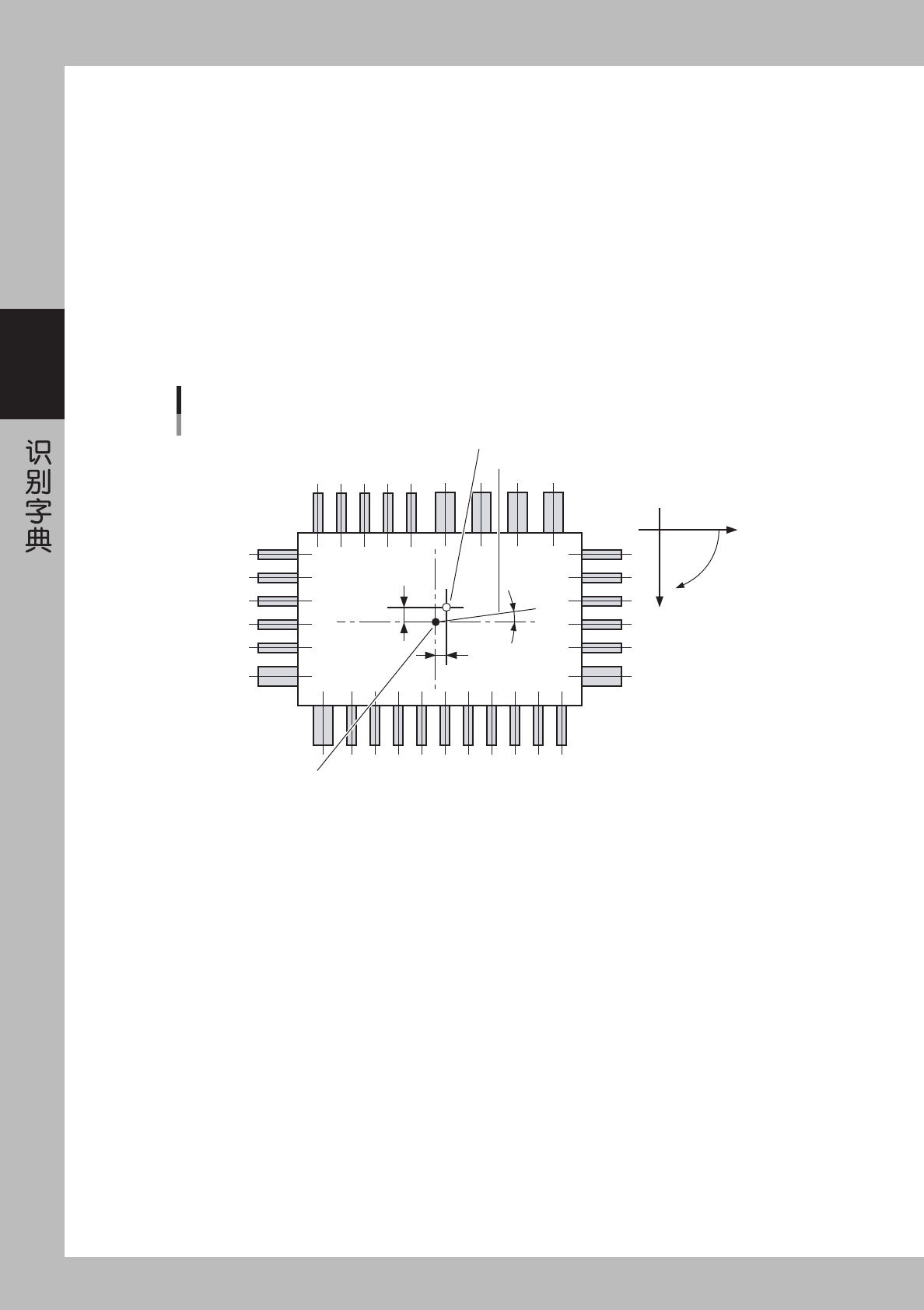
2.1.2 关于元件中心和倾斜的检出
视觉系统中,元件的中心位置 / 倾斜可根据元件的种类通过几种方法检测。
有些元件会出现识别处理得到的中心位置 / 倾斜与实际元件的中心位置 / 倾斜不一致的现象。这时,请将信息库数
据为基础,对被检出的数据进行位移校正。
信息库数据中通常外形中心被定义为元件中心。各边的引脚位置以该元件中心为根本定义。识别处理中通常将元
件的位置作为全引脚前端的重心位置 ( 以下作为识别中心 ),QFP 等外形中心和识别中心一致。这时,识别中心成
为元件中心。
左右 / 上下不对称时,一般识别中心和元件中心不一致。
这时,识别处理就将全引脚前端的重心位置 (X/Y 各坐标的平均值 ) 作为识别中心。这样,可以事先从被定义的元
件数据中 ( 信息库数据 ) 取得全引脚的重心位置和元件中心的位移量,并以此为基础对用识别处理取得的重心位置
实施位移,取得元件中心。倾斜也同样事先先取得位移量,再校正识别结果。
因此,如果信息库数据和实际元件之间存在误差,就不能正确对元件中心的位移进行校正,成为形成贴装误差的
原因。进行位移校正的元件 ( 主要是不对称元件 ) 必须正确设置信息库数据。
Offset X
Offset Y
Offset R
被检出的角度
坐标
外形中心
Y
X
R
全引脚的前端中心
元件中心检出
25011-E0-00
B-7
8
2.2 使用特殊识别设置
用普通的校正类型无法识别时,请使用特殊识别算法识别。以下具体说明设置方法。
2.2.1 QFP 识别方式
QFP 识别方式中有几种特殊识别算法。
1. 算法 : 特殊 1〈特殊 QFP 识别 1〉
如果边端引脚的检测不稳定,请设置该方式稳定边端引脚的检测。
2. 算法 : 特殊 2〈特殊 QFP 识别 2〉
用特殊 QFP 识别 1 只使用横向引脚进行识别的方式。
3. 算法 : 特殊 3〈特殊 QFP 识别 3〉
用特殊 QFP 识别 1 只使用纵向引脚进行识别的方式。
4. 算法 : 特殊 4〈带引脚长度检查功能的 QFP 识别〉
在普通的 QFP 识别中增加了检查引脚长度功能的方式。该方式可以检查将引脚前端连成的直线与各个引脚前端的距离在指定
距离以下。该比例在识别选件 3 中被设置为 1/100mm 单位的数值。可以设置的数值为 0 〜 127(0.01 〜 1.27mm)。
2.2.2 单一接插件识别方式
接插件识别方式中有几种特殊识别算法。
1. 算法 : 特殊 1〈特殊接插件识别 1〉
如果边端引脚的检测不稳定,请设置该方式稳定边端引脚的检测。
2. 算法 : 特殊 2〈只识别长接插件外缘部〉
只用于使用接插件两侧的多个引角进行识别的方式。
3. 校正类型 : 不规则形状接插件
只对单一方向的接插件 ( 接插件 E) 中引脚缺损部分的接插件作识别。识别方法与单一方向的接插件相同。
2.2.3 4 个方向接插件识别方式 ( 接插件 NSEW)
4 个方向接插件识别方式中有几种特殊识别算法。
1. 算法 : 特殊 1〈特殊接插件识别 1〉
如果边端引脚的检测不稳定,请设置该方式能稳定边端引脚的检测。
2. 算法 : 特殊 2〈只识别长接插件外缘部〉
只用于使用接插件两侧的多个引角进行识别的方式。在识别选项 2 中设置两端的检出引角数。
3. 校正类型 : 引脚缺损
对 4 个方向的接插件 ( 接插件 NSEW) 中引脚缺损部分的接插件作识别。识别方法与 4 个方向的接插件相同。
B-8
8
2.2.4 标记型识别方式
标记型识别有几种算法。
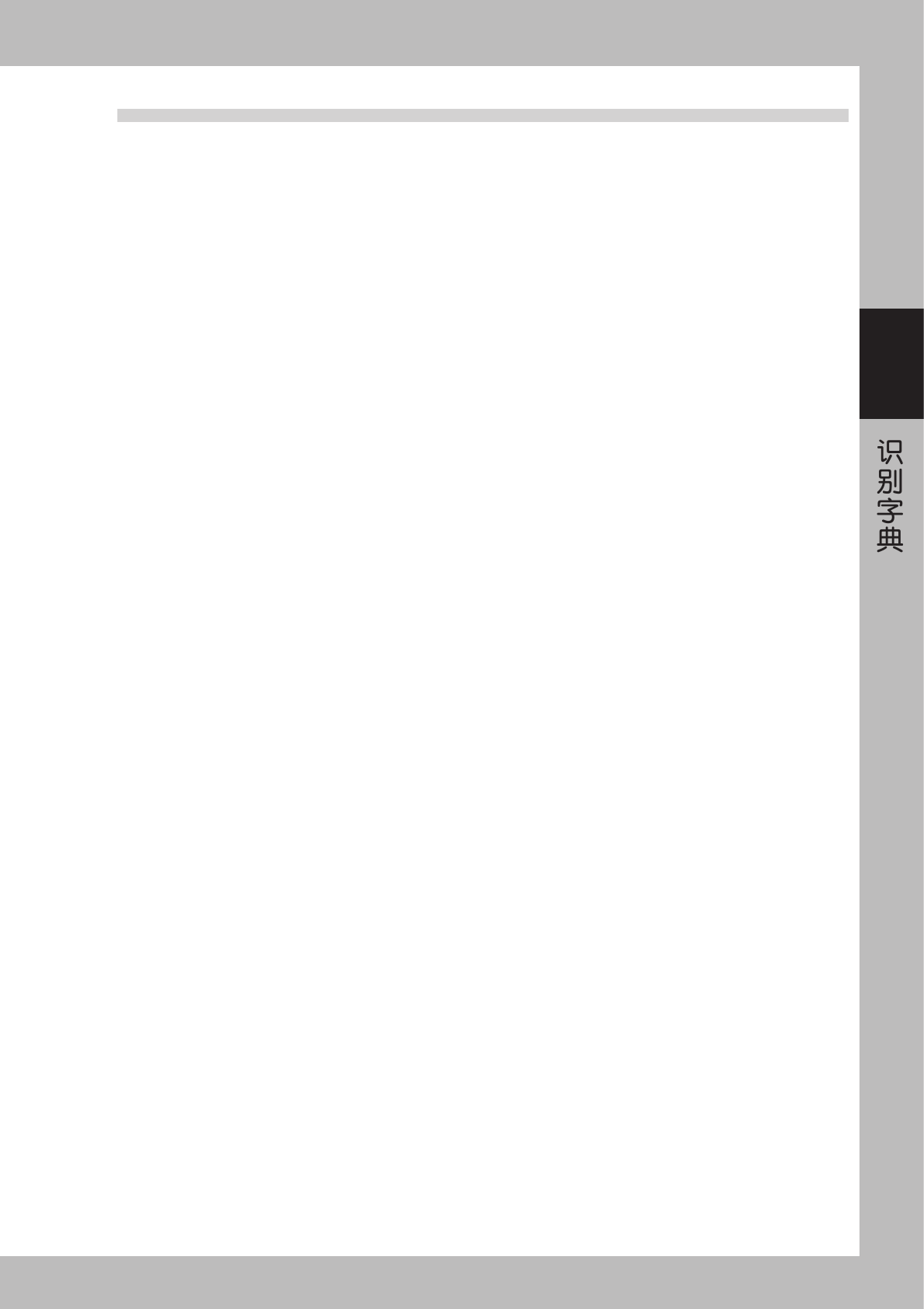
1. 校正类型 : 标记 ( 由 1 个部分组成的元件 )
如下图所示,识别由 1 个部分形成的元件的算法。
适用于识别不规则形状的元件。将元件的中心为重心位置,将主轴的倾斜为倾斜度。因此,圆 / 正方形的元件不能取得倾斜度。
( 因为主轴不存在 )
C
校正类型:标记
25012-E0-00
2. 算法 : 特殊 1 ( 由 1 种形状组成的元件 )
请使用几根直线检出元件的中心及倾斜度。
作为特征量需取得元件大致的重心和倾斜度。以这为基础设置 1、2 直线,并在该直线上的边缘位置求得 P1 〜 P4。P1 和 P2
的中点、P3 和 P4 的中点连成直线 3,直线 3 的倾斜度为元件的倾斜度。再设置平行于直线 3 的直线 5、6、7、8,求得边缘
位置 P5 〜 P8。平衡这些直线,求得元件中心。
P1
P7
P8
P5
P6
P2
G
P3
P4
直线3
直线4
直线1
直线2
直线7
直线8
直线
5
直线6
标记:特殊1
25013-E0-00
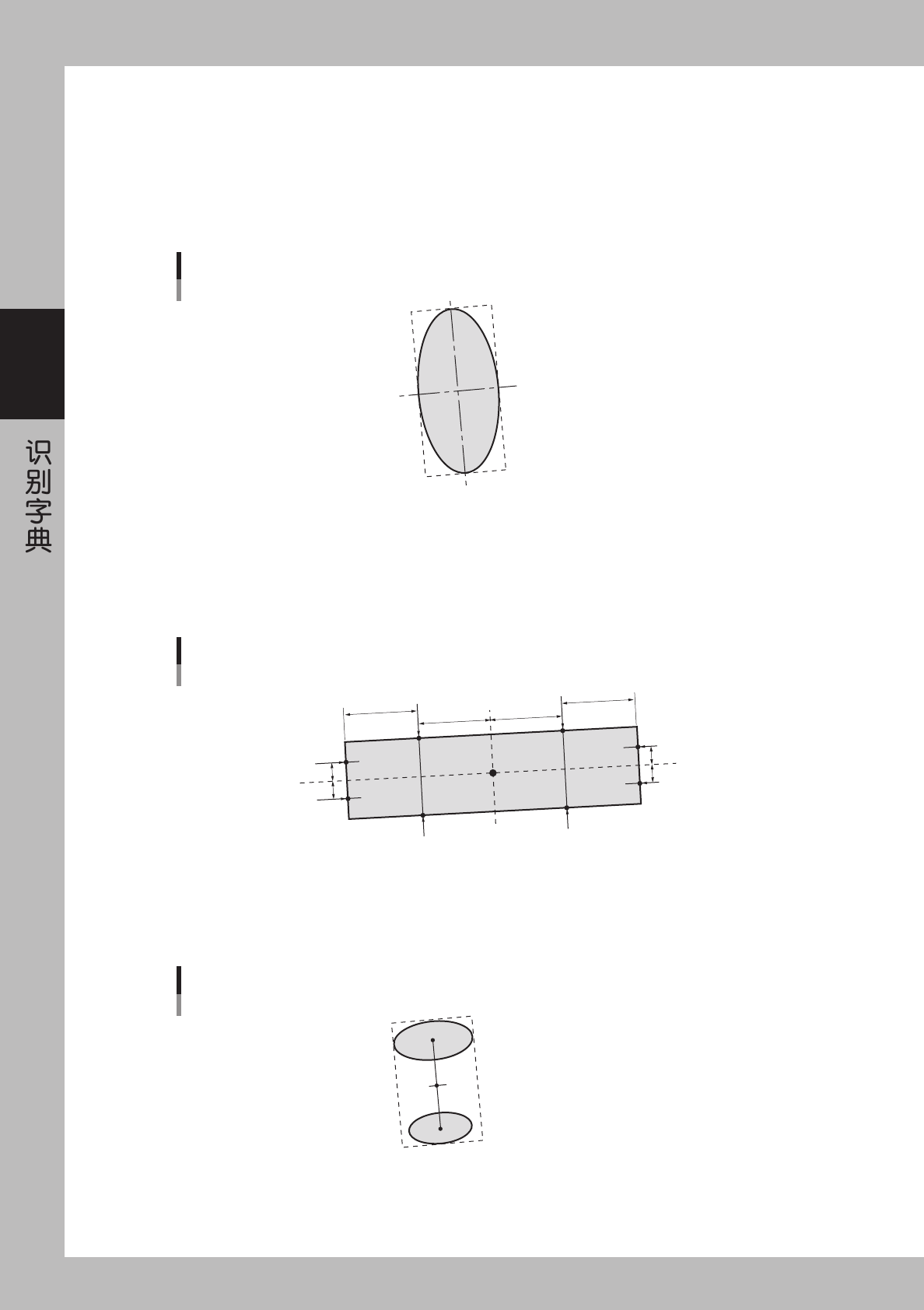
3. 算法 : 特殊 2 ( 形状由 2 个部分组成的元件 )
如下图所示,该算法适用于元件由 2 个部分分别组成时。
中心位置为各个部分的重心平均点,倾斜度为 2 个部分之间的重心位置连成的直线倾斜度。
C1
C2
校正类型:标记
25014-E0-00