SER08989020_YV64 Service_J.pdf - 第135页
3- 114 SER08989020 調整 第 3 章 6 6.2.2 Y 軸 2 次リミットの設定 Y 軸 2 次リミットもメカリミットから 1.00mm 内側に設定します。設定方法は X 軸の場合と同じ要領ですので、 前述の手順を参照してください。下図に Y 軸 2 次リミット検出ドグの取り付け位置を示します。 ■ Y 軸 2 次リミット検出ドグ 2A043609-01 原点検出ドグ 2次リミットドグ X軸ボールスクリュー …

3-
113
SER08989020
調整
第
3
章
6
6
2 次リミットドグの取付位置をずらして調整します。
Step 4 でずれていた分だけ、2 次リミット検出ドグの取付位置を移動してく
ださい。Step 4 と同じ操作を行って、2 次リミット位置がメカリミットから
1.0mm内側に設定されていることを確認してください。
調整後の2 次リミット座標値をメモしておいてください。後述のXY 軸のソフ
トリミットの設定に使用します。
7
2 次リミット検出ドグの固定ネジを締めます。
8
他方の2 次リミットについても、同様に設定します。
設定が終了したら、手でヘッド部を動かして、移動許可領域内に戻してくださ
い。
3-
114
SER08989020
調整
第
3
章
6
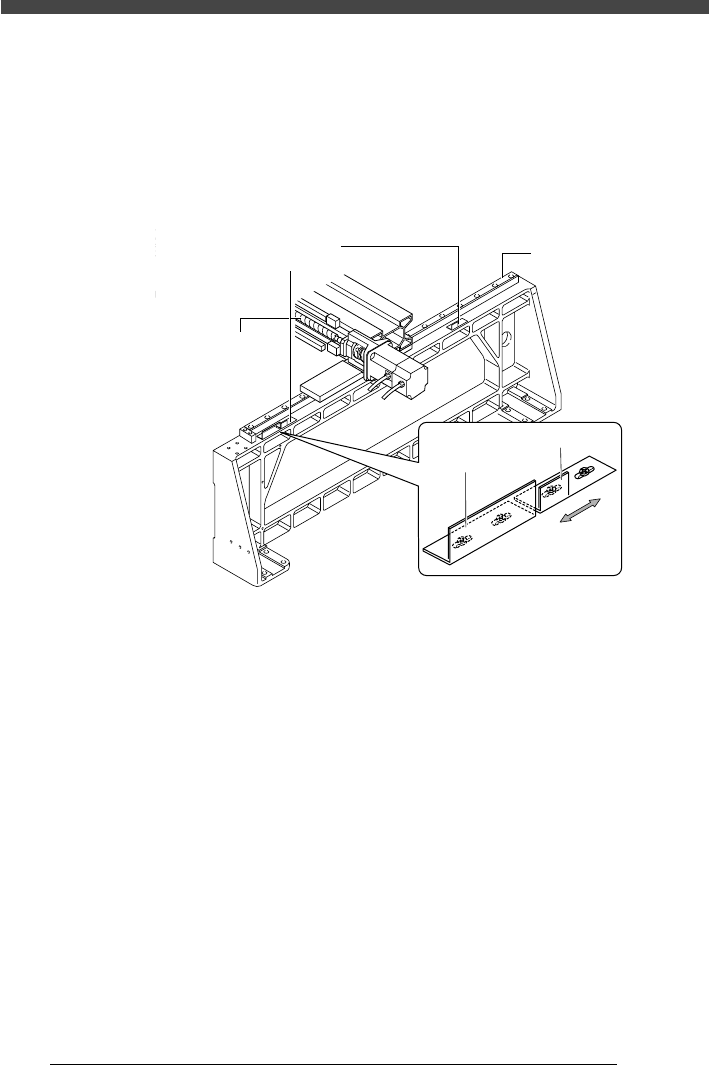
6.2.2 Y軸2次リミットの設定
Y 軸2 次リミットもメカリミットから1.00mm 内側に設定します。設定方法は
X 軸の場合と同じ要領ですので、前述の手順を参照してください。下図にY 軸
2 次リミット検出ドグの取り付け位置を示します。
■ Y 軸2 次リミット検出ドグ
2A043609-01
原点検出ドグ
2次リミットドグ
X軸ボールスクリュー
Y軸ガイド
2次リミット
検出ドグ
3-
115
SER08989020
調整
第
3
章
6
6.3 ソフトリミット
軸移動の際に目標位置が両端のメカニカルストッパーと干渉しないように、移動
許可領域を制限する設定値です。目標位置がこの設定値を越えていると、「ソフト
リミットオーバー!」のエラーメッセージが表示されて、軸移動を停止します。
手動モードのときには、この設定値の範囲内でジョイスティックが使えます。
6.3.1 W軸ソフトリミットの設定
W 軸のソフトリミットは、プラス側(幅拡大方向)・マイナス側(幅縮小方向)
ともにメカニカルストッパーから 0.50mm 内側に設定します。この設定値が適
正ならば、搬送可能基板幅 50.00mm(最小)∼407.00mm (最大)の仕様
を満たします。下記の手順でW 軸ソフトリミットを設定します。
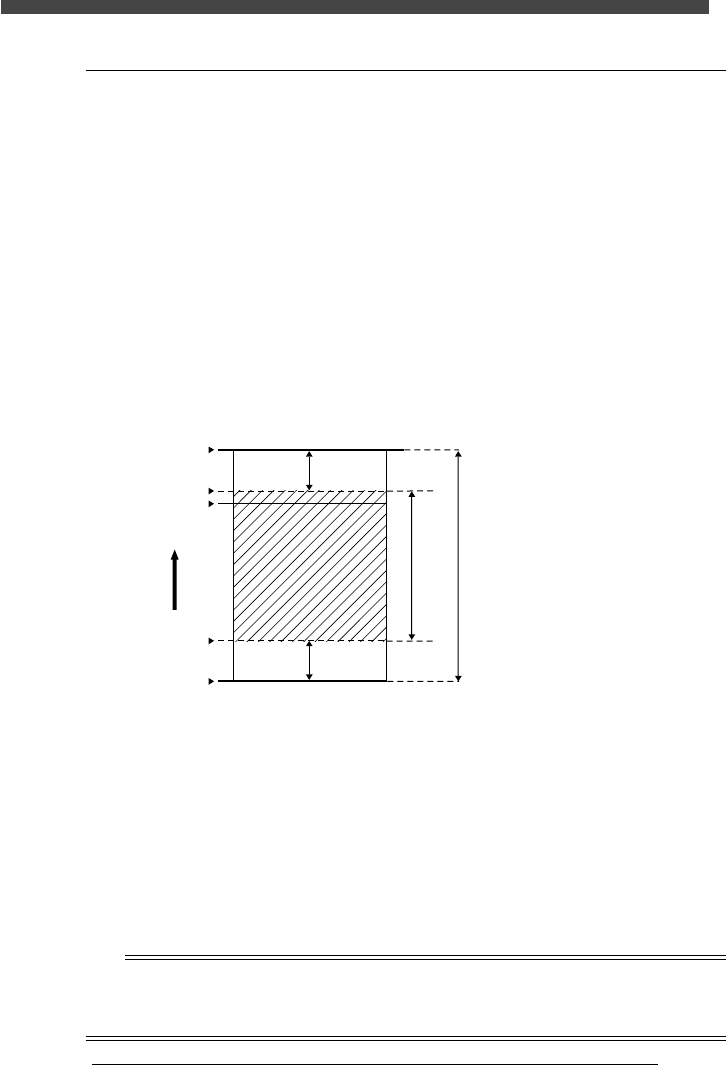
■ W 軸移動許可領域
20043610-02
0.50mm
C
F
E
D
0.50mm
F
B
A
A:構造的可動領域
B:可動許可領域
C:プラス側ソフトリミット
D:原点
E:マイナス側ソフトリミット
F:メカリミット
<後>
原点復帰方向
<前>
1
W 軸を選択をします。
「3/4/A1 アームの選択」で「本機コンベア幅」を選択実行してください。
2
YPU のジョイスティックを操作して、W 軸コンベア幅を動か
します。
プラス側ソフトリミットを設定する場合は幅拡大方向に、マイナス側の場合は
幅縮小方向に、コンベアレールを動かしてください。
d
n
要点
YPUのジョイスティックを左に倒すとコンベア幅が拡大し、右に倒すと縮小します。メカニカルス
トッパーに接触しない範囲で、最大あるいは最小幅にしてください。(現在のソフトリミットがメ
カリミットの内側に設定されていれば、そこで軸移動は停止します。)