SER08989020_YV64 Service_J.pdf - 第31页
3- 10 SER08989020 調整 第 3 章 1 1 . ヘッド部 Y V 6 4 のヘッド部は、4 連ヘッド(ヘッド1∼ 4 )より構成されています。部品 の吸装着精度を保つために、各ヘッドの下降・上昇動作や真空発生が適切でなけ ればなりません。さらに、ヘッド部に関するマシンデータも最適値に設定する必 要があります。ここでは、ヘッド部のエア駆動、真空発生、マシンデータの確認 および設定方法について説明します。 ■ YV64 ヘ…
3-
9
SER08989020
調整
第
3
章
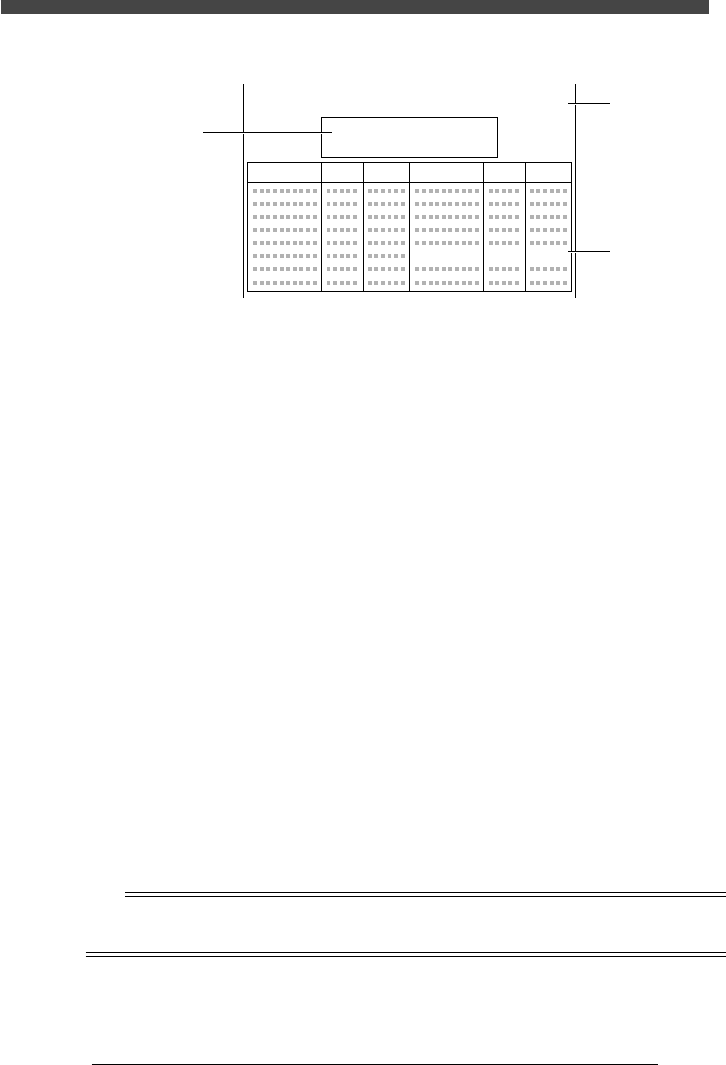
■ 入力モニター画面例
6A043007-00
[↑↓←→]で選択し [Enter]で実行
[ESC]:中断,コマンドウィンドウヘ
入力モニター 指定アーム
軸移動速度
NL09
本機
100
検出
コンベア NL09-16 10000000
名 称 名 称OUT
IN
基板固定位置基板検出
XY軸:
:
1
1
3
2
①説明表示部
入出力モニターの各I/O 信号は、"TN01" あるいは"NP09"のように文字と数字
からなる記号で表されます。選択された信号名と、"0" と "1" の説明が薄いブ
ルーのボックスに表示されます。
②デジタルI/O 信号の状態
デジタルI/O 信号のON/OFF状態が2進数(1と0)で表示されています。例
えば、前ページの画面では"TN01" のメインストッパーが ON(上昇)している
ことを示しています。また、上図の画面では"NL09" の基板固定位置の基板セン
サーが基板を感知していることを示しています。チェックまたは動作させたい項
目を選択するには、矢印キー(または [PageUp] [PageDown] キー)を使っ
て黄色のカーソルを合わせてください。 [TAB] キーを押すと、入出力モニター
が切り替わりカーソルも入出力モニター間を移動します。
出力モニターでは [ENTER] キーを押すたびにカーソルを合わせた対象がON/
OFF します。入力モニターでは各センサーの検出状態を確認できます。
③指定アーム・軸移動速度
入出力モニター画面の右上には、調整時の指定アーム(軸)・軸移動速度が表示
されています。指定アームや軸移動速度を切り替えるには、YPU の [SEL
AXIS] ・ [AXIS GROUP] キーや [SPEED] キーを押すか、「3/4/A1 アーム
の選択」や「3/4/A2 運転スピード選択」コマンドを使用します。
n
要点
各部の動作確認をするときや調整作業の際に、手動モードの入出力モニターを頻繁に開きますの
で、読み方などに慣れておくと良いでしょう。
3-
10
SER08989020
調整
第
3
章
1
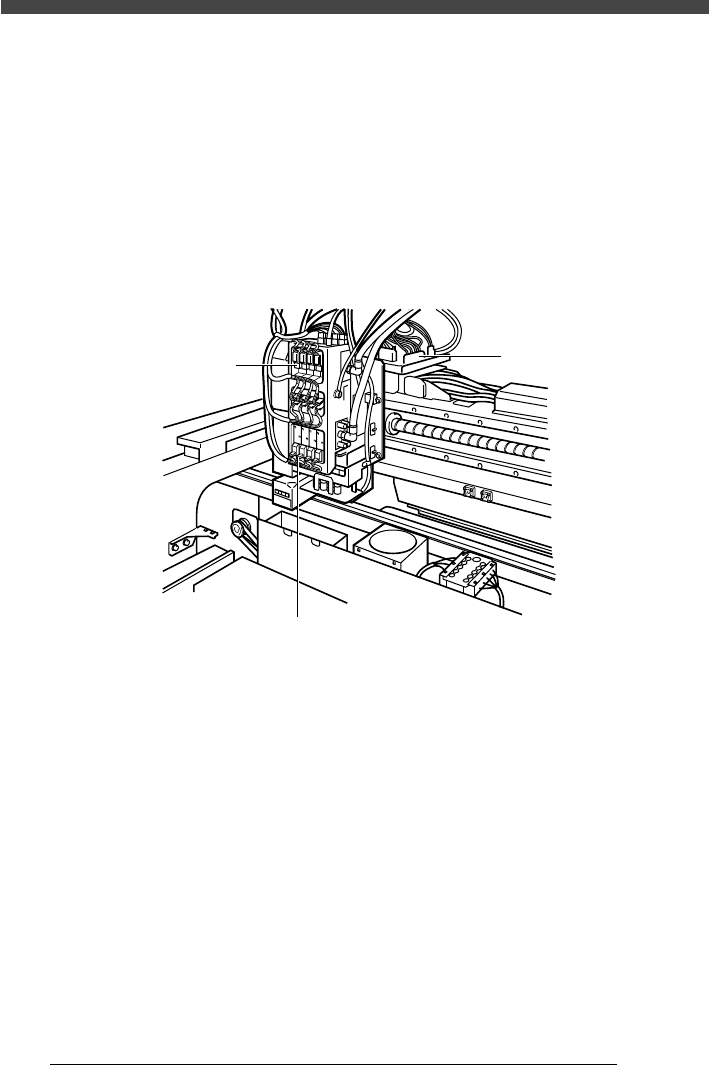
1. ヘッド部
YV64 のヘッド部は、4 連ヘッド(ヘッド1∼ 4)より構成されています。部品
の吸装着精度を保つために、各ヘッドの下降・上昇動作や真空発生が適切でなけ
ればなりません。さらに、ヘッド部に関するマシンデータも最適値に設定する必
要があります。ここでは、ヘッド部のエア駆動、真空発生、マシンデータの確認
および設定方法について説明します。
■ YV64ヘッド部
20843100-00
ヘッド部 I/O ボード
ヘッド下降駆動バルブ
真空発生器
3-
11
SER08989020
調整
第
3
章
1
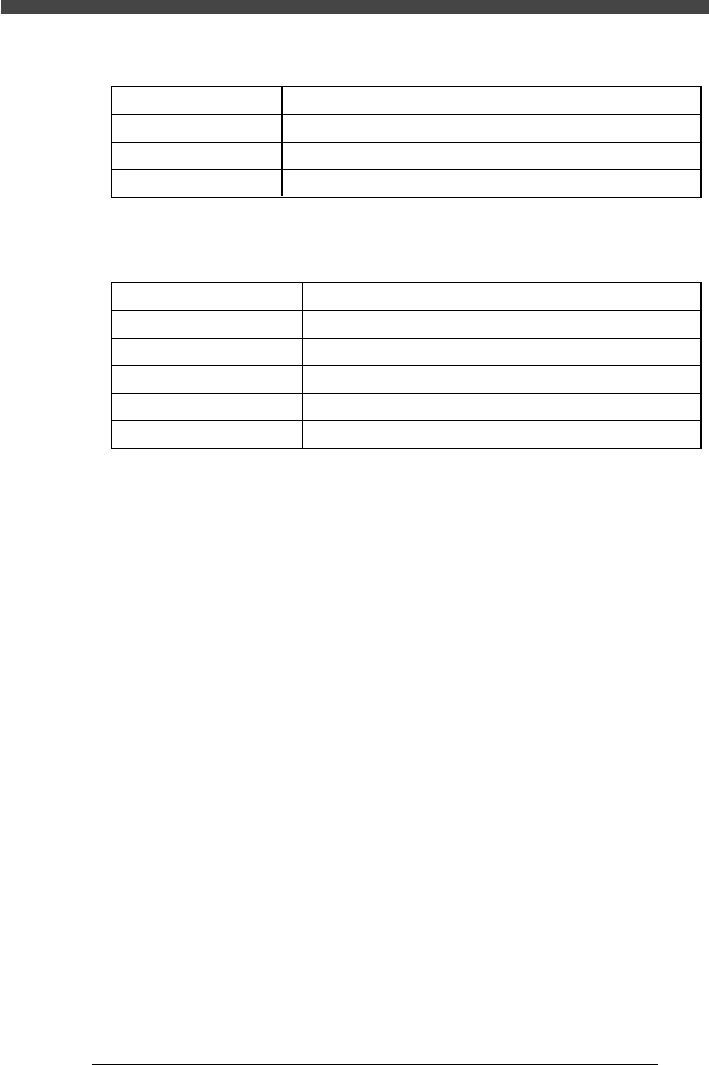
■ ヘッド部の真空発生系の確認項目
40843100-01
ヘッド下降動作
下降端検出機能
真空発生動作
真空センサー機能
ヘッドの下降動作は正常か
ヘッド下降時に下降端は正しく検出されているか
真空発生器の発生真空度は充分か
真空センサーの表示レベルは正常か
■ ヘッド部のマシンデータの設定項目
40843101-00
機械座標
吸装着レベル
R軸絶対精度補正
ノズル偏心補正 *
ヘッドオフセット *
ヘッド下降オフセット *
原点からの各部の位置座標など
部品の吸装着を判別するために基準となる真空圧
ノズルシャフトを回転させるR軸の角度補正
ノズルシャフトを180度回転させたときの偏心補正
ヘッド1に対するヘッド2∼4の相対位置
カメラ認識時と基板上面での回転軸ズレの補正
* 後述の「7. 搭載フィードバック」を実行して最適化します。