SER08989020_YV64 Service_J.pdf - 第95页
3- 74 SER08989020 調整 第 3 章 3 3 . 2 マルチ認識カメラ YV64 で は 、 マルチ認識カメラと呼んでいる 1 次元 C C D カメラで部品を高速認 識しています。マルチ認識カメラの調整では、下記の項目をデータマネージャー の「補助調整」とマシン調整モードのユーティリティを使って最適化します。 ■ マルチ認識カメラの調整項目 40843304-00 視野 ピント&絞り 照明光量 カメラスケール …
3-
73
SER08989020
調整
第
3
章
3
0
[ENTER]キーを押します。
移動カメラがX 方向と Y 方向に移動します。ビジョンディスプレイ内の移動
量に基づいてカメラスケールが計算され、下図のように結果が表示されます。
ロケートピンやプッシュアップは、測定が終了すると自動的に解除されます。
60043311-00
<<モード>> 3/マシン調整
A431
移動カメラのスケールの調整結果を表示します。
結果を残したい場合には「ENTER」キーを、
破棄したい場合「ESC」を押してください。
スケールx
スケールy
角度r
=
=
=
xx.xx
yy.yy
rr.rr
q
結果を残したい場合は、[ENTER]キーを押します。
結果を破棄したい場合は、[ESC]キーを押してください。
w
調整データを保存します。
「B2 調整後データ保存」または「B0 データ保存後終了」を選択実行してくだ
さい。(保存したくない場合は、「B3 調整前データ復活」または「B7 強制終
了」を選択実行してください。)
e
e
非常停止ボタンを押してから、基板を取り除きます。
3-
74
SER08989020
調整
第
3
章
3
3.2 マルチ認識カメラ
YV64では、マルチ認識カメラと呼んでいる1 次元 CCD カメラで部品を高速認
識しています。マルチ認識カメラの調整では、下記の項目をデータマネージャー
の「補助調整」とマシン調整モードのユーティリティを使って最適化します。
■ マルチ認識カメラの調整項目
40843304-00
視野
ピント&絞り
照明光量
カメラスケール
両方向認識オフセット
スケールとデータマネージャーの「補助調整」を使用
フォーカスアジャスタ(KM1-M8803-100)を使用
ライトアジャスタ(KM1-M8806-000)を使用
形状が正確に分かっているSOPを使用
形状が正確に分かっているSOPを使用
調整項目 備 考
3.2.1 視野の調整
以下の手順でマルチ認識カメラの視野を調整します。あらかじめ、ノズルに吸着
させやすい金属スケールを用意してください。
e
1
非常停止ボタンを押してから、調整の準備をします。
フィーダープレート部のキャリアテープ排出ガイドを取り外して、カメラレン
ズに手が届くようにします。(キャリアテープガイドはフィーダープレートの
両端にボルトで固定されています。)
一括交換台車を使用している場合は、マウンターから取り外してください。
参考
視野の調整後、引き続いて次項の「3.2.2 ピントと絞り」の調整に移りますので、キャリアテープ
排出ガイド(あるいは一括交換台車)は取り外したままにしておきます。
2
非常停止を解除します。
非常停止ボタンを回転解除し、YPU の[READY]キーを押してください。
e
3-
75
SER08989020
調整
第
3
章
3
3
QFP 用ノズルをヘッド 1 に取り付けます。
安全を確認してから、「ノズルチェンジ」コマンドを実行し、タイプ 33 または
34ノズルをヘッド1に取り付けます。 (オートノズルチェンジャーが付いていな
いマシンでは、非常停止ボタンを押してから、手でノズルを交換してください。)
4
「カメラ位置座標」の「マルチ認識カメラ Z」を確認します。
「3/2/A1 編集ファイル切替」→「カメラ位置座標」を選択実行し、「マルチ認
識カメラ Z」が「機械座標」画面の「基板/ 固定トレイ」の「Z」と同じ高さ
であることを確認します。異なっていたら数字キーで修正し保存してください。
60843329-00
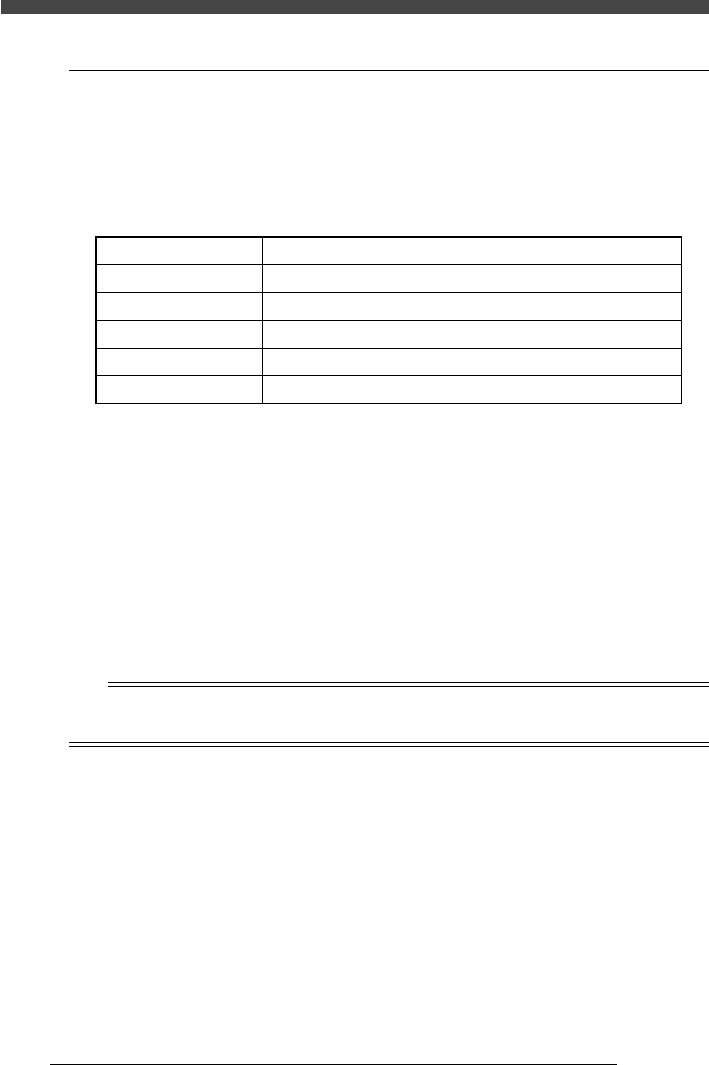
7
<<<アプリケーション>>> 3/メンテナンス/M
<<モード>> 2/マシンデータ編集
Y
カメラ位置座標
マルチ認識カメラ 1
XZ
R
0.00
9.50
110.72
27
最大部品XY 最大部品Z
189.92
カメラ番号
編集中
編集対象
基板面高さ(Z)と同じ値
5
補助調整を利用してカメラの視野を映し出します。
1. データマネージャーの部品データベースを開き、適当な100 ピン QFP 部
品にカーソルを合わせます。
2. [F6]キーを押して補助調整に入ります。
6
3.「部品吸着」コマンドを実行し、ヘッド1 を指定します。
ヘッド1が吸着位置に移動します。
e
4. 非常停止ボタンを押してから、ノズルにスケールを吸着させます。
スケールをY 軸と平行にして、ヘッド1 のノズルに吸着させてください。
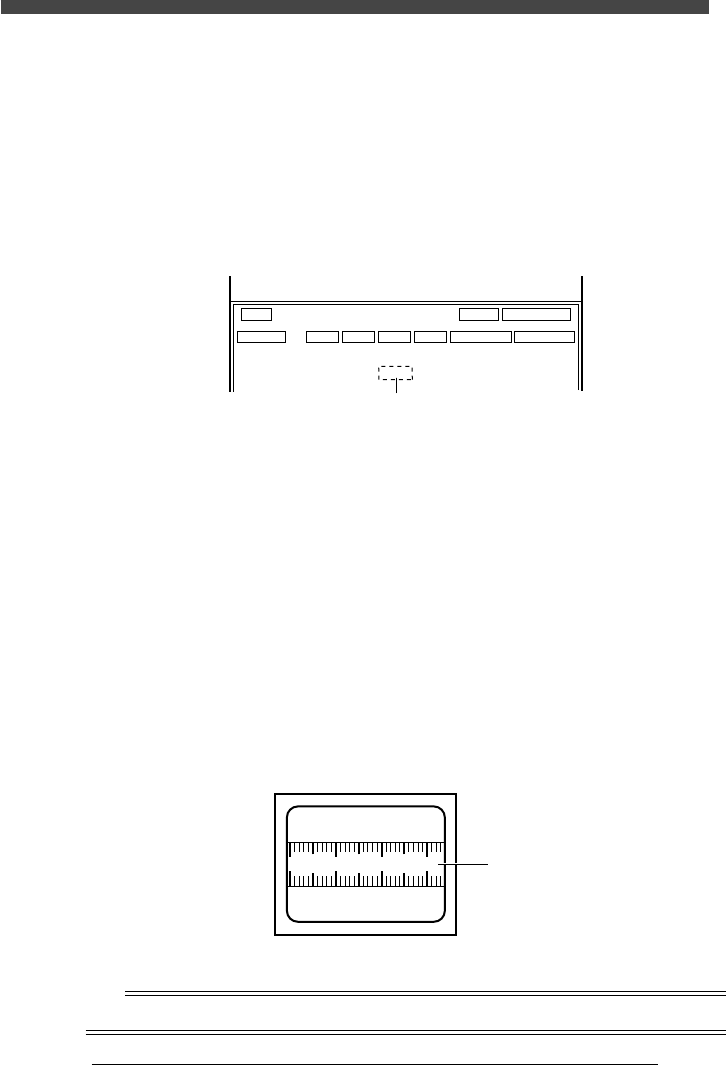
5. 非常停止を解除して、「部品認識」コマンドを実行します。
ヘッド部がマルチ認識カメラ上を横切り、スケールの映像がビジョンディ
スプレイに表示されます。
e
90843306-00
ビジョンディスプレイ
スケール
20 30 40 50
参考
補助調整の詳細はオペレーションマニュアルを参照してください。