SER08989020_YV64 Service_J.pdf - 第152页
3- 131 SER08989020 調整 第 3 章 7 7.1.3 搭載実行: AMF64 基板や部品およびコンベアユニットの段取りが完了したら、自動運転モードで部 品を試搭載します。自動運転の詳細はオペレーションマニュアルをご覧くださ い。 c 注意 「3/1/A1 オプション構成」の「多段階認識」の項目が「工場調整用」になっていることを確認し てください。 1 安全を確認して、非常停止を解除します。 非常停止ボタンを回転解除し、…
3-
130
SER08989020
調整
第
3
章
7
7.1.2 搭載の準備
使用する基板データに合わせて、コンベアユニットの調整やフィーダーを準備す
る必要があります。
1
搭載を実行するデータを開きます。
「2/1/ データ編集」で、AMF64 の部品情報を選択実行します。
2
コンベアユニットを調整します。
e
非常停止ボタンを押して、「2/1/B7 コンベアユニット操作」を使って基板に
合わせてロケートピンやプッシュアップを調整してください。
3
テープフィーダーをセットします。
ユーザー定義情報の「フィーダーセット番号」の位置にフィーダーをセットし
ます。
4
部品の認識状態を確認します。
補助調整(オペレーションマニュアル参照)を使って部品の認識状態を確認し
ます。
5
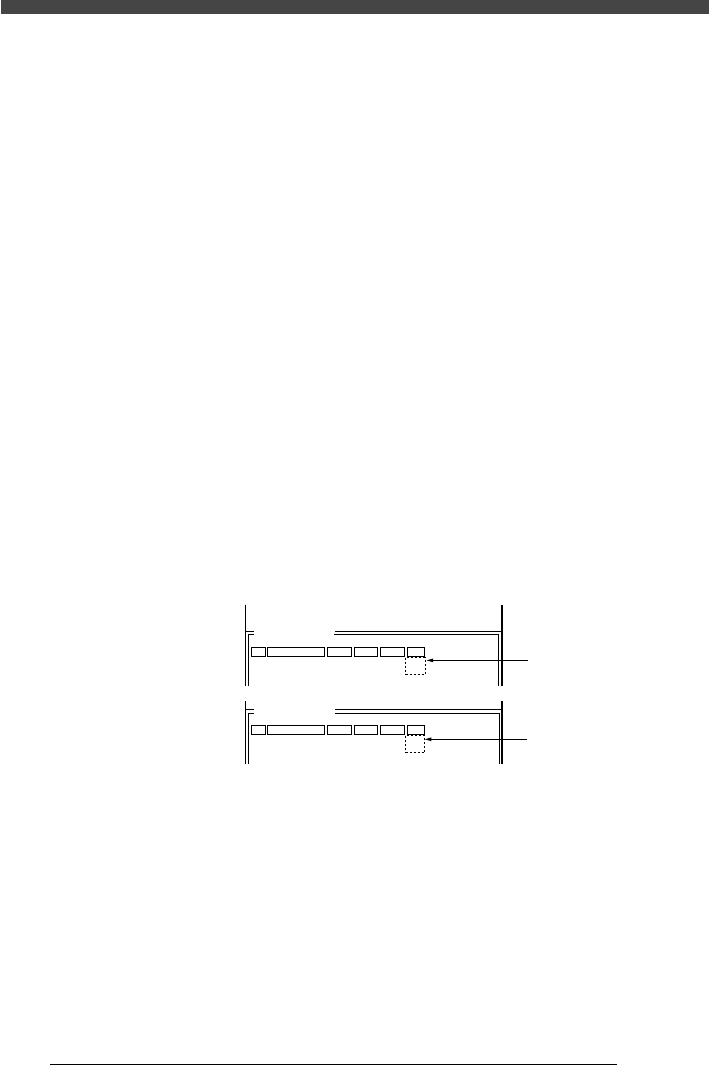
流れ方向の確認をします。
ブロックリピート情報画面を開き、流れ方向によってブロックリピートの「実
行」を変更します。
■ ブロックリピート情報画面
60843716-00
基板:AMF64
編集:*ブロックリピート
X Y R 実行ブロックコメント
0.00
0.00
0.00
-218.60
Rigth Flow
Left Flow
0.00
0.00
No.
1
2
実行
スキップ
基板:AMF64
編集:*ブロックリピート
X Y R 実行ブロックコメント
0.00
0.00
0.00
-218.60
Rigth Flow
Left Flow
0.00
0.00
No.
1
2
スキップ
実行
<<<アプリケーション>>> 2/データM
<<モード>> 1/データ編集
左→右流れ
右→左流れ
ここを確認する
ここを確認する
3-
131
SER08989020
調整
第
3
章
7
7.1.3 搭載実行:AMF64
基板や部品およびコンベアユニットの段取りが完了したら、自動運転モードで部
品を試搭載します。自動運転の詳細はオペレーションマニュアルをご覧くださ
い。
c
注意
「3/1/A1 オプション構成」の「多段階認識」の項目が「工場調整用」になっていることを確認し
てください。
1
安全を確認して、非常停止を解除します。
非常停止ボタンを回転解除し、YPU の[READY]ボタンを押してください。
e
2
自動運転での基板を指定します。
「1/1/自動運転」→ 基板名「AMF64」を指定してください。
3
自動運転で基板に部品を実装します。
「A/ 運転コマンド」→「A2 自動運転(RUN)」を選択実行してください。
g
4
搬送をOFF にします。
「1/1/A6 搬送 ON/OFF」を選択実行してください。実装後、そのまま自動搭
載フィードバックに入るためです。
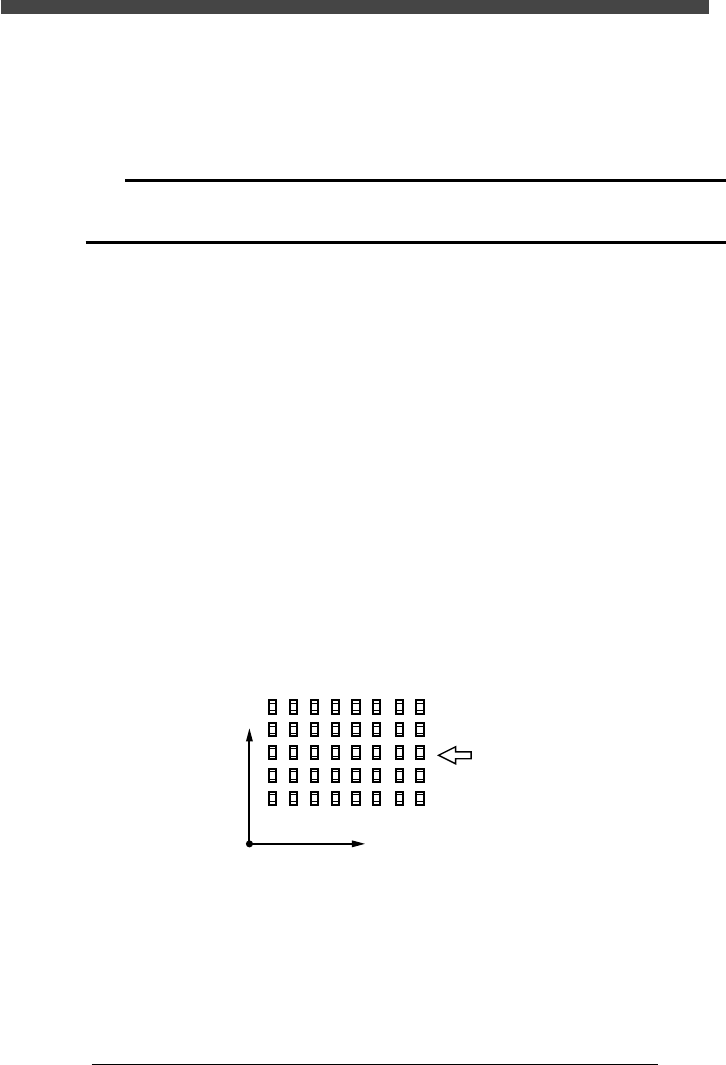
■「AMF64」による部品搭載例
10843707-00
90 -90 90 -90 90 -90 90 -90
Head 1 Head 2 Head 3 Head 8
PCB Origin
+X
+Y
Multi-Vision Camera
QFP Mode (AMF64)
3-
132
SER08989020
調整
第
3
章
7
7.1.4 自動搭載フィードバックの実行
部品を搭載したら「自動フィードバック」ユーティリティを実行して、搭載ズレ
を自動調整します。
1
基板フィデューシャルマークの認識状態を確認します。
1.「2/3/ データベース」→「 A1 部品 / マークデータベース切替 」→
「マークデータベース 」を選択実行します。
2. マークデータベースNo.297;FUDUCIAL1.5 の補助調整(ポチ)画面を開
きます。
3. 基板をコンベアに固定させ、「マーク認識テスト」や「適正値検索」を実行
して、マークが認識されることを確認してください。
詳しくは「オペレーションマニュアル」をご覧ください。
2
搭載した部品をマークとして認識できるかどうかを確認します。
試搭載した部品は、自動搭載フィードバックでマークとして認識させるため、
マークデータベースNo.298; C2125_90 として登録されています。
部品が認識されることを Step 1 と同じ方法で確認してください。
3
「自動搭載フィードバック」プログラムを読み込みます。
1.「3/1/マシン構成 」にカーソルを合わせ、[Ctrl]キーを押しながら、
[ENTER]キーを押してください。
lm
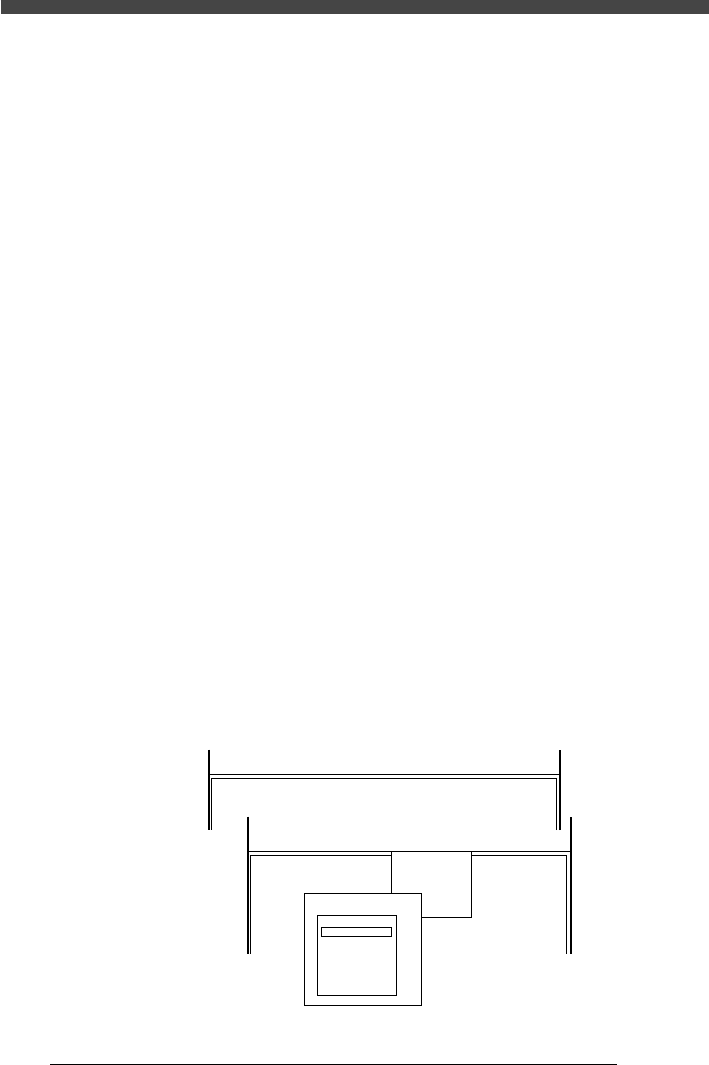
2.「D1 データファイル切替 」を選択します。
3. 実行したいプログラムを選択します。
AMF64L.PGM → マルチ認識カメラで左から右流れ
AMF64R.PGM → マルチ認識カメラで右から左流れ
60843708-00
3/メンテナンス/M
<<モード>> 1/マシン構成
<コマンドリスト> D/ファイル
D1 データファイルの切替
AMF64R.PGM
AMF64L.PGM
PGM FILES