SER08989020_YV64 Service_J.pdf - 第41页
3- 20 SER08989020 調整 第 3 章 1 1.2.3 ロケートピン基準 基板を搭載位置へ固定するときの基準位置となる座標です。移動カメラを使って 固定ロケートピンの中心をティーチングします。 1 ロケートピンを上昇させます。 1. 「 3/4/C1 出力モニター」を選択実行します。 2 . カーソルを「 TN03」 (ロケートピン 1 ) に合わせ、 [ENTER] キーを押しま す。 「 TN03」 の出力表示は、ロケ…

3-
19
SER08989020
調整
第
3
章
1
1.2.1 FINE角度
オプションのシングル認識カメラ(YV64では使用しない)で FINEモード認
識を行う際に、角度の収束範囲を指定するパラメーターです。このパラメーター
は、標準のYV64では無効です。
1.2.2 マルチカメラ
マルチカメラY
部品認識の際にヘッド部がマルチカメラ上を動くスピードを表します。この値
は、マルチカメラの照明輝度を考慮して、出荷時に」470 前後に設定されてい
ますので変更しないでください。
マルチカメラZ, R
Z 座標がマルチ2(YV64では使用しない)、R 座標がマルチ1 のカメラの角度
ズレを修正するパラメーターになっています。通常 0.00 に設定します。
60843113-03
対象名
X
機械座標
FINE角度
マルチカメラ
ロケートピン基準
基板外形基準
待機位置
廃棄位置
基板面/固定トレイ
両方向認識オフセット
同時吸着範囲
QFP装着浮代
チェンジタイマー/ソクド
YZ
編集中
0.00
16.22
16.22
16.22
0.30
470.00
195.00
195.00
106.38
106.38
0.00
0.30
100.00
14.29
14.29
75.15
75.15
0.76
0.30
200.00
R
フィーダー
0.00
0.00
0.00
-60.00
16.95
-0.01
1.00
50
種類
0.03
連続タイプ
通常
300
4.00
編集対象
3-
20
SER08989020
調整
第
3
章
1
1.2.3 ロケートピン基準
基板を搭載位置へ固定するときの基準位置となる座標です。移動カメラを使って
固定ロケートピンの中心をティーチングします。
1
ロケートピンを上昇させます。
1.「3/4/C1 出力モニター」を選択実行します。
2. カーソルを「TN03」(ロケートピン1) に合わせ、[ENTER]キーを押しま
す。
「TN03」の出力表示は、ロケートピンが上昇すると "1" に変化します。
2
マシン調整モードに入り、「3/3/B4 ティーチング実行条件」
を指定します。
ティーチングユニットは「カメラ」、運転速度は「どれを選択してもかまいま
せん。
参考
マシン調整モードでティーチング実行条件を指定する場合、運転速度はどれを選択しても、安全の
ため最初は最低速度(SPEED 5=20)に設定されます。速度を変更するには、ティーチング実行条
件を指定した後、YPUの[SPEED]キーを押してください。
3
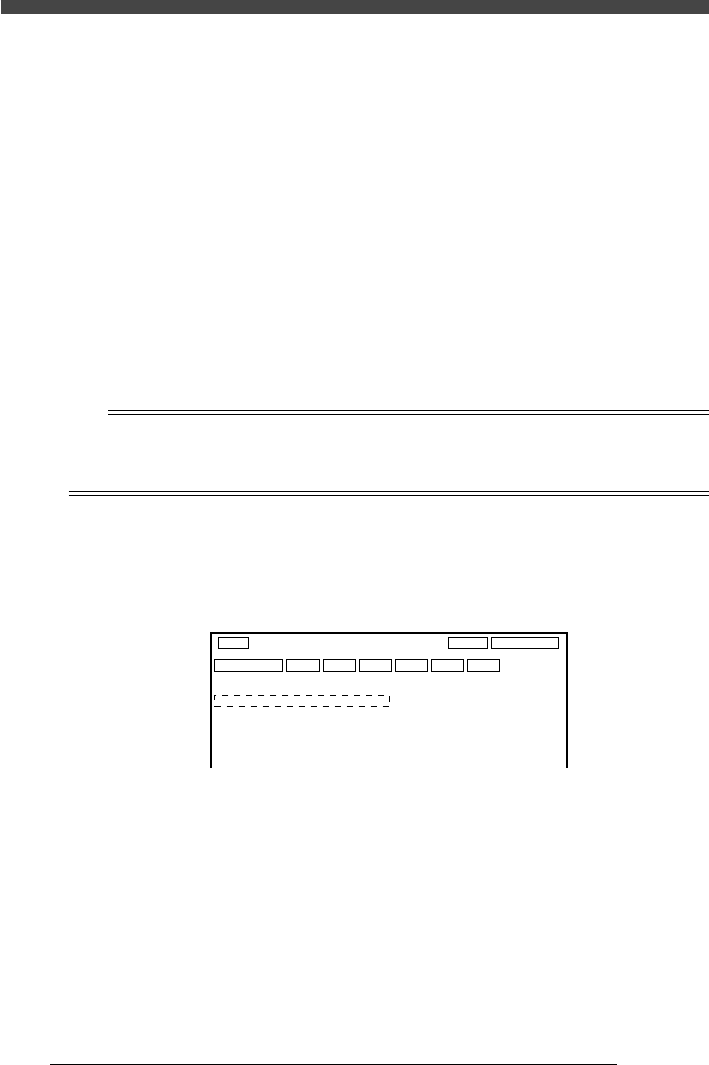
機械座標画面を開きます。
「3/3/B1 調整項目選択」→「機械座標」を選択実行してください。
4
カーソルを「ロケートピン規準」の「X」に合わせます。
60843114-03
対象名
X
機械座標
FINE角度
マルチカメラ
ロケートピン基準
基板外形基準
待機位置
廃棄位置
基板面/固定トレイ
両方向認識オフセット
YZ
編集中
0.00
16.22
16.22
16.22
470.00
195.00
195.00
106.38
106.38
0.00
0.30
14.29
14.29
75.15
75.15
0.76
R
フィーダー
0.00
0.00
0.00
-60.00
16.95
-0.01
50
種類
0.03
連続タイプ
通常
300
編集対象
5
ロケートピンの中心と移動カメラを合わせます。
YPU のジョイスティックを操作して、固定ロケートピンの中心をビジョン
ディスプレイのセンターカーソルに合わせてください。
ヘッド部を微少移動させるときは、YPU の[SPEED]キーを押して低速度を選
択するか、ジョイスティックを移動方向にわずかに傾けるとよいでしょう。
d
3-
21
SER08989020
調整
第
3
章
1
6
ティーチングを実行します。
1. [F10]キーを2回押して、X 座標を入力します。
0
2. 次にカーソルを「ロケートピン規準」の「Y」に合わせます。
3. [F10]キーを2回押して、Y 座標を入力します。
0
7
ティーチングしたデータを保存します。
[ESC]キーを押してから、「B2 調整後データ保存」または「B0 データ保存後
終了」を選択実行してください。(保存したくない場合は、「B3 調整前データ
復活」または「B7 強制終了」を選択実行してください。)
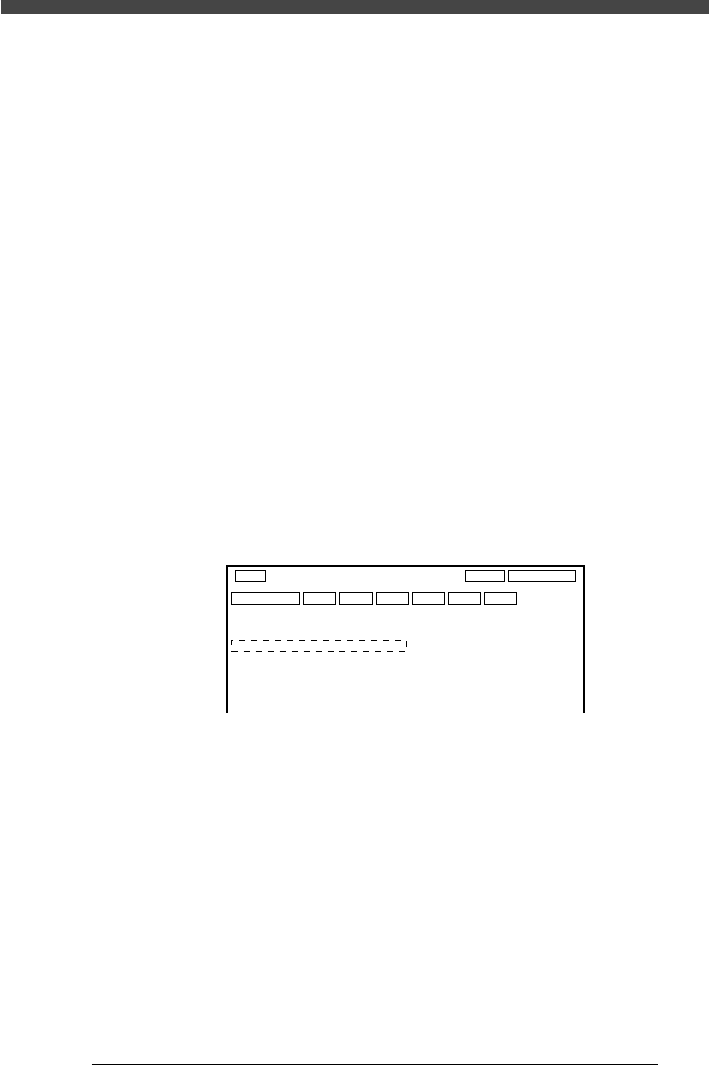
1.2.4 基板外形基準
基板固定方法を「基板外形基準」にしたときに、ロケートピン基準と比べて位置
がずれることがあります。このズレを求めて、ロケートピンから引いた値をここ
に入力します。通常は「ロケートピン基準」と同じ値を入力しておきます。
60843115-03
対象名
X
機械座標
FINE角度
マルチカメラ
ロケートピン基準
基板外形基準
待機位置
廃棄位置
基板面/固定トレイ
両方向認識オフセット
同時吸着範囲
YZ
編集中
0.00
16.22
16.22
16.22
0.30
470.00
195.00
195.00
106.38
106.38
0.00
0.30
14.29
14.29
75.15
75.15
0.76
0.30
R
フィーダー
0.00
0.00
0.00
-60.00
16.95
-0.01
1.00
50
種類
0.03
連続タイプ
通常
300
編集対象