SER08989020_YV64 Service_J.pdf - 第149页
3- 128 SER08989020 調整 第 3 章 7 7 . 実装調整 搭載精度に関係する種々の調整が完了した後に、部品を基板に試搭載させなが ら、最終的な仕上げ調整を行います。実装状態を移動カメラで画像認識して自 動的に搭載精度を補正する「自動フィードバック」と、目視で調べた補正値を キー入力する通常の「搭載フィードバック」を使って調整します。 ■ 搭載フィードバックを使った実装調整フロー 20853701-00 搭載の準備をす…

3-
127
SER08989020
調整
第
3
章
6
6
調整データを保存します。
[ESC]キーを押してから、「B2 調整後データ保存」または「B0 データ保存後
終了」を選択実行してください。(保存したくない場合は、「B3 調整前データ
復活」または「B7 強制終了」を選択してください。)
3-
128
SER08989020
調整
第
3
章
7
7. 実装調整
搭載精度に関係する種々の調整が完了した後に、部品を基板に試搭載させなが
ら、最終的な仕上げ調整を行います。実装状態を移動カメラで画像認識して自
動的に搭載精度を補正する「自動フィードバック」と、目視で調べた補正値を
キー入力する通常の「搭載フィードバック」を使って調整します。
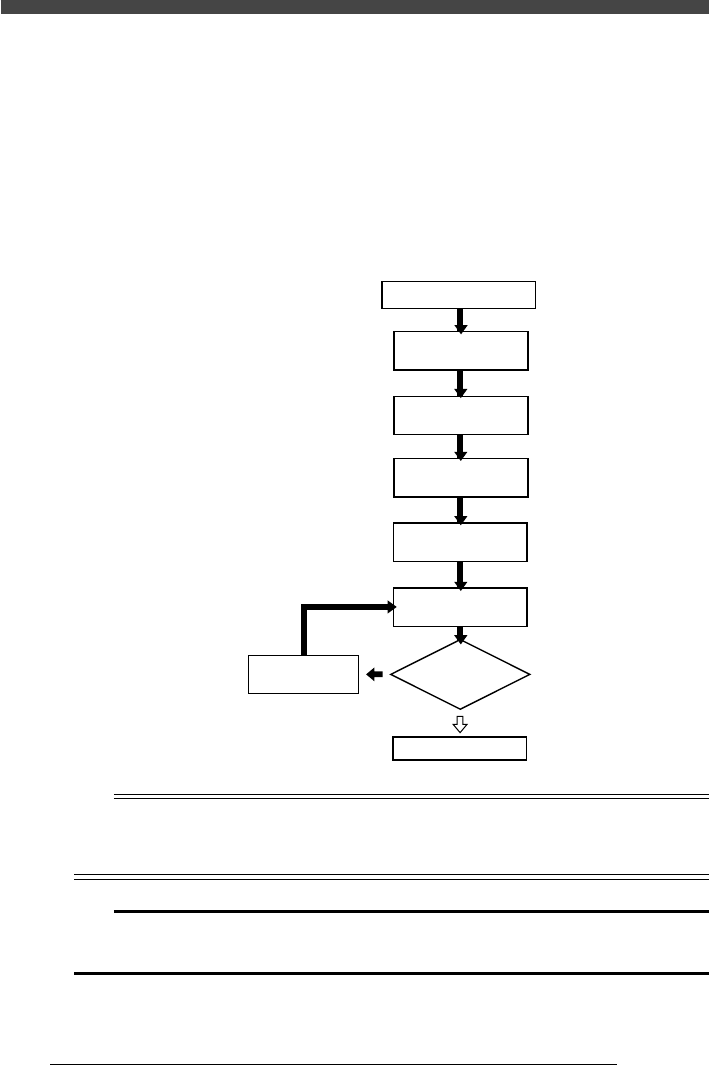
■ 搭載フィードバックを使った実装調整フロー
20853701-00
搭載の準備をする
(基板データAMF64)
流れ方向の確認をする
(ブロックリピートの変更)
搭載を実行する
(基板データAMF64)
自動搭載
フィードバック
(AMF64*.PGM)
確認用の搭載
を実行する
(ADJ_L_MOUNT_MULTI)
*:LまたはR
基板と部品の準備をする
搭載
フィードバック
(調整ユーティリティー)
搭載ズレがあるか?
(X, Y位置ずれ)
終 了
NO
YES
n
要点
調整作業を効率よく行うために、最初に「自動搭載フィードバック」による調整を2度行います。
それでもまだズレがある場合は、補正値のキーボード入力による「搭載フィードバック」を実行し
てください。
c
注意
搭載フィードバックによる仕上げ調整を行う前に、「1.4 R軸絶対精度補正」や「3. 画像認識装
置」をはじめ、「4. フィーダープレート」や「7. 作動軸」の調整を完了しておいてください。

3-
129
SER08989020
調整
第
3
章
7
7.1 自動搭載フィードバック
自動搭載フィードバックを実行すると、搭載ズレを自動的に補正することができ
ます。以下の準備をしてから、自動搭載フィードバックを行います。
7.1.1 基板と部品の準備
自動搭載フィードバックは、AMF64と呼ばれる基板データを使ってを実行しま
す。この基板データに合わせて、専用の基板と部品を準備してください。
1
調整用の基板を用意します。
YAMAHAテストボード「α -TEST BOARD 0KK0-91000-0」(黒塗りタイ
プ)を用意してください。(このテストボードにはランドパターンはありませ
ん。)
2
基板裏面にスプレーのりを吹き付けます。
基板面が汚れていないことを確認してから、基板の端部より5mm 程度および
マーク部分をマスキングして、部品固着用のスプレーのりを基板全体に均一に
吹き付けてください。(後述の自動フィードバックの際に両面テープは適しま
せん)
3
部品を用意します。
C2125部品を付けた 8mm テープフィーダーを用意してください。