SER08989020_YV64 Service_J.pdf - 第158页
3- 137 SER08989020 調整 第 3 章 7 3 「搭載フィードバック」を実行します。 「 3/3/ マシン調整」→「B 1 調整項目選択」→「搭載フ ィードバック」を選択 実行してください。 60843713-00 <<<アプリケーション>>> 3/メンテナンス/M <<モード>> 3/マシン調整 <コマンドリスト> B/ファィル操作 B1 …
3-
136
SER08989020
調整
第
3
章
7
2
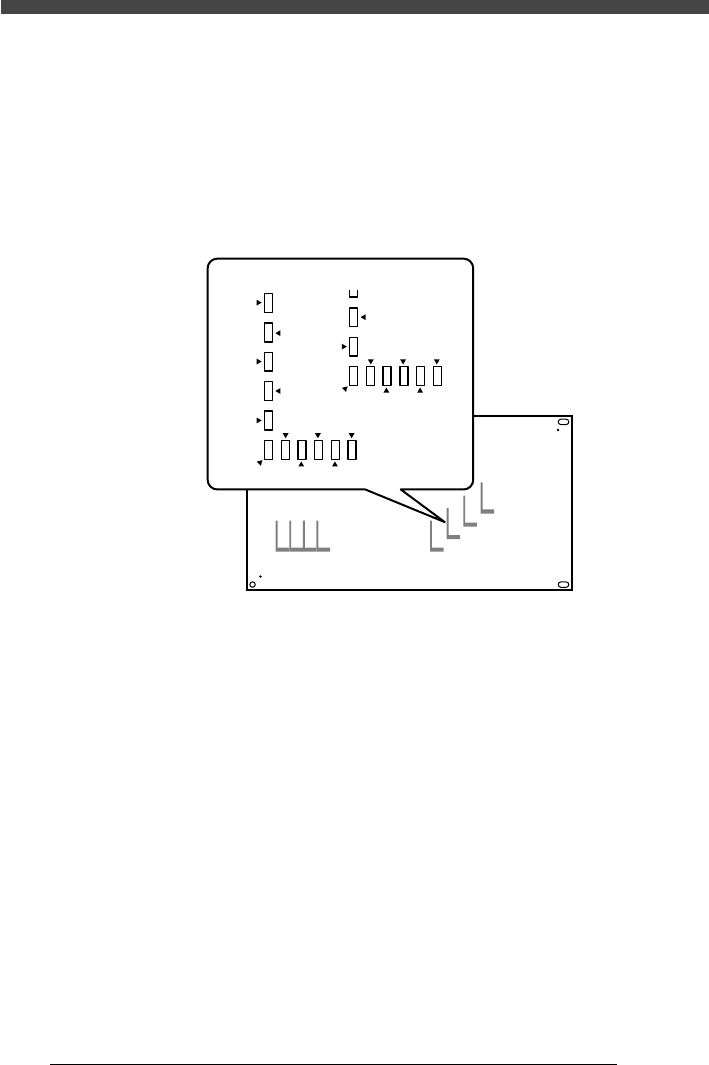
次に、基板右側の搭載パターンを調べます。
基板右側には、ヘッド1 と他のヘッドで交互に部品が90 度搭載されていま
す。
ヘッド1 での搭載を基準にして、各ヘッドでの搭載ズレ量を調べてください。
X, Y 方向とも、基板原点側にズレている場合はマイナス値、逆の場合はプラ
ス値のズレ量となります。
■「ADJ_L_MOUNT_MULTI」による基板右側の搭載パターン
10843712-00
YAMAHA TEST BOARD
ADJ_L_MOUNT_MULTI
H1
H2
H2
H2H2
H1
H2
H2
H1
Head 1
H1
H3
H3
H3H3
Head 1
H1
H1 H1
Multi-Vision Camera QFP Mode
3-
137
SER08989020
調整
第
3
章
7
3
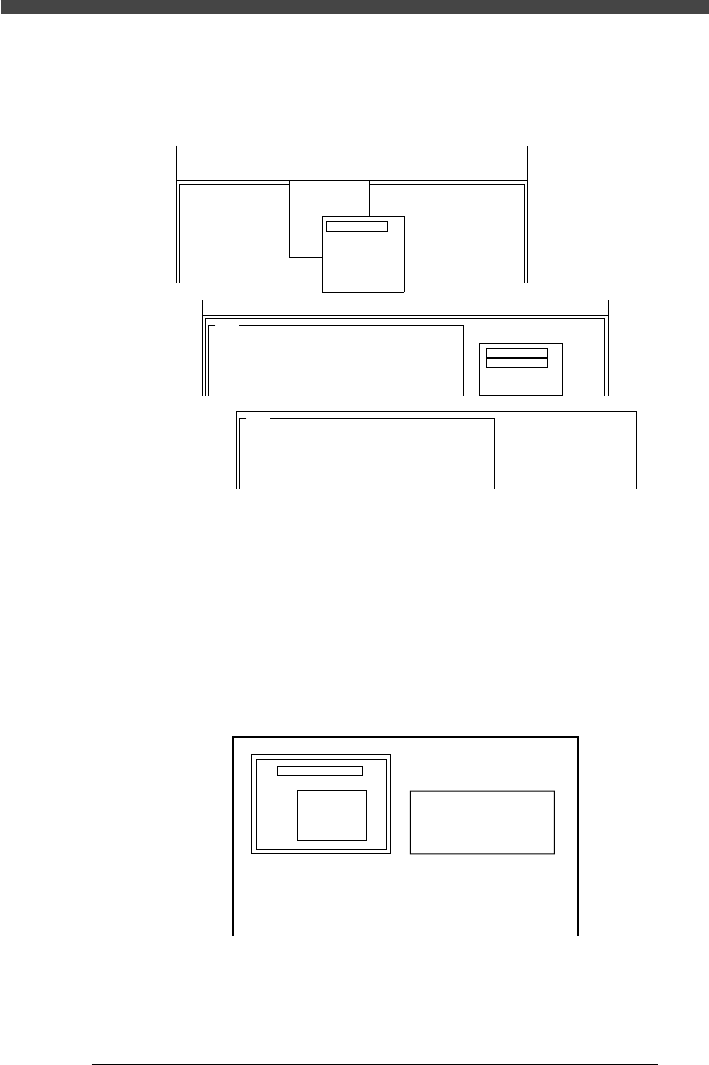
「搭載フィードバック」を実行します。
「3/3/ マシン調整」→「B1 調整項目選択」→「搭載フィードバック」を選択
実行してください。
60843713-00
<<<アプリケーション>>> 3/メンテナンス/M
<<モード>> 3/マシン調整
<コマンドリスト> B/ファィル操作
B1 調整項目選択
調整検索対象
搭載フィードバック
<<モード>> 3/マシン調整
A701
搭載フィードバックの手順
1.基板[ADJ_L_MOUNT-****]を実装し、
”X, Yの位置・・・
調整対象
X、Y位置ずれ
角度の補正
A703
搭載フィードバックの手順
1.基板[ADJ_L_MOUNT_****]を実装して下さい。
実装結果から・・・
4
「X, Y 位置ずれ」を選択します。
角度のズレに関しては、ここでは補正しません。(R 絶対精度補正と自動
フィードバックを実行すれば、通常は角度のズレは起こりません。)
5
再度 [ENTER]キーを押して、次のステップへ進みます。
6
Step 1 で調べたズレ量を入力します。
各ヘッドごとに、X とY 方向の平均ズレ量を入力してください。
最終項目まで入力したら、[ENTER]キーを押してください。
60843714-00
[ADJ_L_MOUNT_****] の
”基板左側のL字・・・
90度搭載と−90度搭載の千鳥ズレのズレ・・・
マルチカメラ
ヘッド
1
2
3
4
X
0.00
0.00
0.00
0.00
Y
0.00
0.00
0.00
0.00
3-
138
SER08989020
調整
第
3
章
7
7
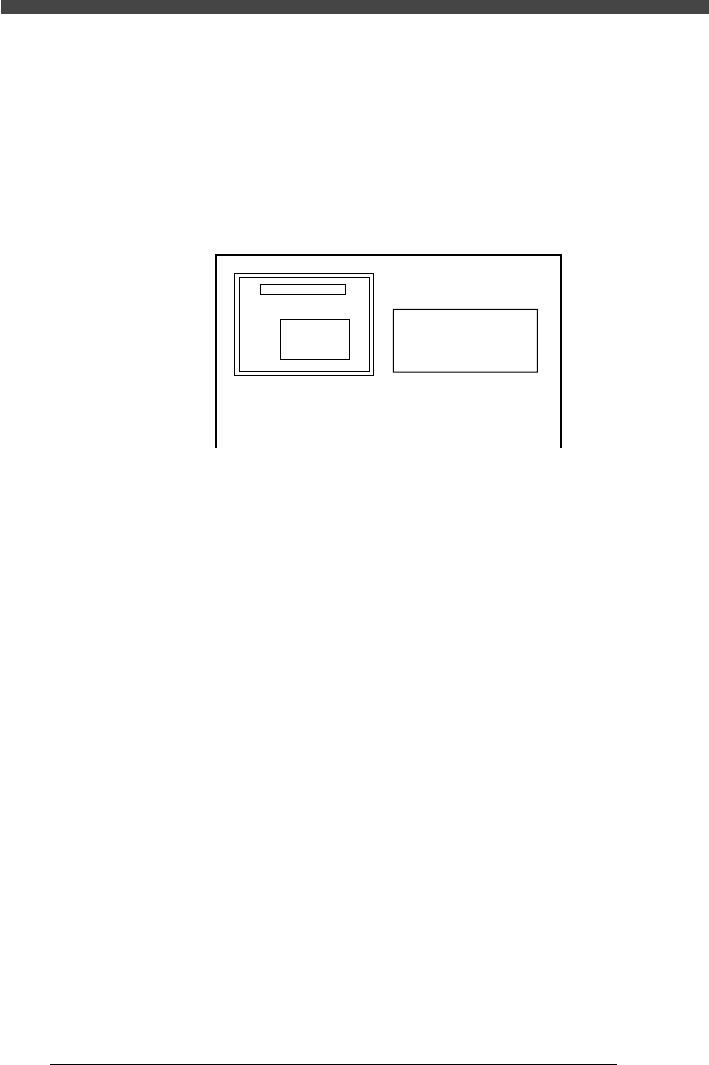
入力値を確認して、[スペース]バーを押します。
入力値に基づいて、自動的に補正値が計算されます。調整を中止したい場合
は、[ESC]キーを押してください。
8
次に、Step 2 で調べた搭載ズレ量を入力します。
ヘッド1 に対する、各ヘッドでのX と Y 方向の平均ズレ量を入力してくださ
い。
最終項目まで入力したら、[ENTER]キーをを押してください。
60843715-00
[ADJ_L_MOUNT_****] の
”基板左側のL字・・・
マルチカメラ
ヘッド
1
2
3
4
X
0.00
0.00
0.00
Y
0.00
0.00
0.00
No.1ヘッドと各ヘッドのズレ量を・・・
9
入力値を確認して、[スペース]バーを押します。
入力値に基づいて、自動的に補正値が計算されます。
調整を中止したい場合は、[ESC]キーを押してください。
0
調整結果を保存します。
「B2 調整後データ保存」または「B0 データ保存後終了」を選択実行してくだ
さい。
(保存したくない場合は、「B3 調整前データ復活」または「B7 強制終了」を
選択実行してください。)
q
搭載フィードバックによる微調整の効果を確認します。
再び基板に部品を搭載して、実装状態を確認してください。
基板左と右側の2 つの搭載パターンでのズレが0になるまで上記手順を繰り返
してください。