SER08989020_YV64 Service_J.pdf - 第47页
3- 26 SER08989020 調整 第 3 章 1 7 機械座標画面を開きます。 「3/3/B1 調整項目選択」→「機械座標」を選択実行してください。 8 カーソルを「基板面 / 固定トレイ」の「Z 」に合わせます。 60843118-03 対象名 X 機械座標 FINE角度 マルチカメラ ロケートピン基準 基板外形基準 待機位置 廃棄位置 基板面/固定トレイ 両方向認識オフセット 同時吸着範囲 QFP装着…
3-
25
SER08989020
調整
第
3
章
1
1.2.7 基板面/固定トレイ
「基板面」は部品を装着するときのヘッド部全体の高さで、「Z」欄に入力されて
います。搭載位置に置かれた基板表面にヘッド1 のノズル先端がちょうど接触
する高さをティーチングします。
「固定トレイ」は固定トレイを使用したときのパレット面の高さで、「R」欄に入
力されています。
下記の手順で、「基板面」をティーチングします。あらかじめ、適当な基板を用
意してください。また、ヘッド 1 にタイプ31 ノズルが付いていることを確認し
てください。
1
用意した基板の幅にコンベア幅を合わせます。
「2/1/B7 コンベアユニット操作」コマンドを使用すると便利です。
e
2
非常停止ボタンを押して、基板を固定します。
プッシュアップを使用して基板の上面を確定してください。(この場合、ロ
ケートピンは特に使用しなくてもかまいません。)
3
ヘッド部を手で基板上に移動させます。
ヘッド1 のノズルが基板の上に来る位置で止めてください。
4
安全を確認して、非常停止状態を解除します。
非常停止ボタンを解除し、YPU の[READY]ボタンを押してください。
e
5
出力モニターを開き、ヘッド1 を下降させます。
1.「3/4/C1 出力モニター」を選択実行します。
2. カーソルを「TE01」(ヘッド 1 下降)に合わせます。
3. [ENTER]キーを押してヘッド1 を下降させます。
出力モニター表示は、ヘッドが下降すると "1" に変化します。
6
マシン調整モードへ入り、「3/3/B4 ティーチング実行条件」
を指定します。
ティーチングユニットは「ヘッド1」、運転速度はどれを選択してもかまいま
せん。
参考
マシン調整モードでティーチング実行条件を指定する場合、運転速度はどれを選択しても、安全の
ため最低速度に設定されます。速度を変更するには、ティーチング実行条件を指定した後、YPUの
[SPEED]キーを押してください。
3-
26
SER08989020
調整
第
3
章
1
7
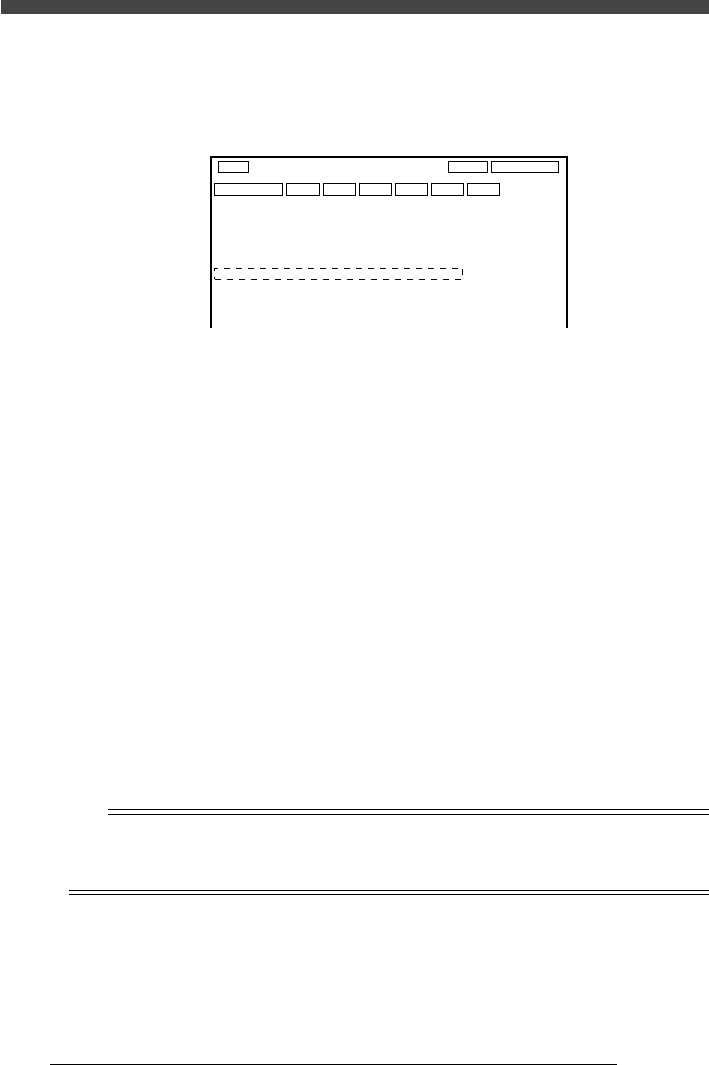
機械座標画面を開きます。
「3/3/B1 調整項目選択」→「機械座標」を選択実行してください。
8
カーソルを「基板面/ 固定トレイ」の「Z」に合わせます。
60843118-03
対象名
X
機械座標
FINE角度
マルチカメラ
ロケートピン基準
基板外形基準
待機位置
廃棄位置
基板面/固定トレイ
両方向認識オフセット
同時吸着範囲
QFP装着浮代
チェンジタイマー/ソクド
YZ
編集中
0.00
16.22
16.22
16.22
0.30
470.00
195.00
195.00
106.38
106.38
0.00
0.30
100.00
14.29
14.29
75.15
75.15
0.76
0.30
200.00
R
フィーダー
0.00
0.00
0.00
-60.00
16.95
-0.01
1.00
50
種類
0.03
連続タイプ
通常
300
4.00
編集対象
9
ヘッド1 を基板面上に下降させます。
YPU のジョイステックを操作して、ヘッド1 のノズル先端がちょうど基板面
に接触する高さに合わせてください。
d
0
ティーチングを実行します。
[F10]キーを2回押して、Z 座標を入力します。
0
q
ティーチングしたデータを保存します。
[ESC]キーを押してから、「B2 調整後データ保存」または「B0 データ保存後
終了」を選択実行してください。(保存したくない場合は、「B3 調整前データ
復活」または「B7 強制終了」を選択実行してください。)
w
基板を取り除きます。
e
非常停止ボタンを押してから、プッシュアップを解除し、基板をコンベアから
取り除いてください。
参考
・ 基板を使用せずに、コンベアレールの基板固定位置をティーチングすることもできます。
(基本的にコンベアレールの上面と基板上面は同じ高さになります。)
・ 固定トレイの高さ(R欄)も上記と同じ方法でティーチングします。
3-
27
SER08989020
調整
第
3
章
1
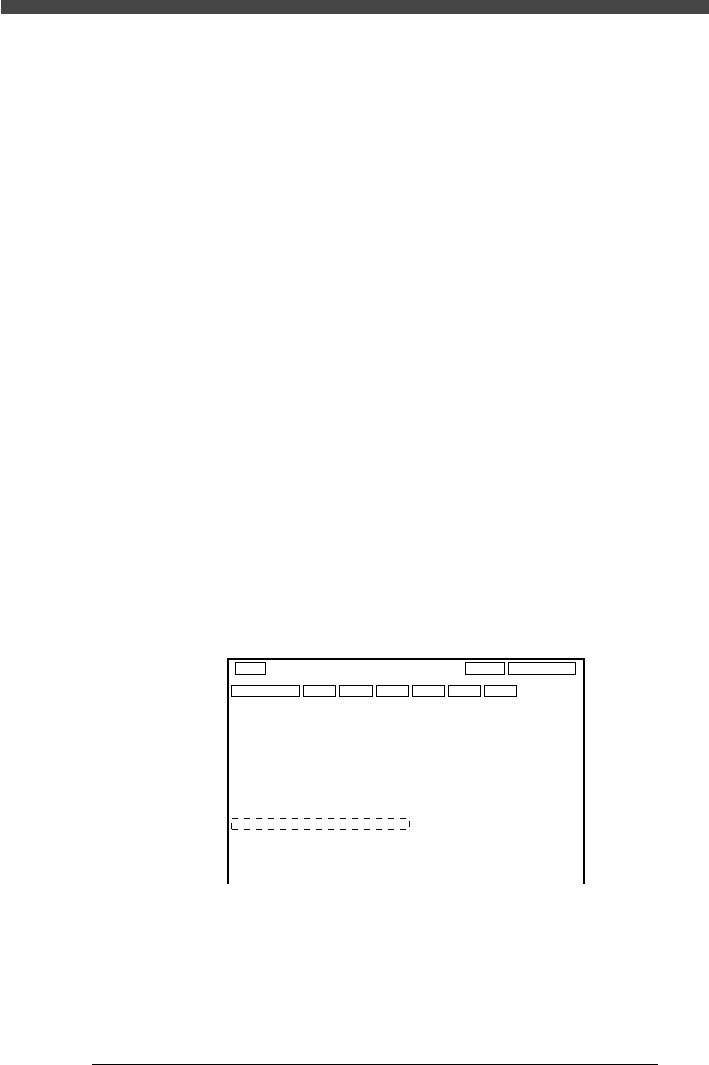
1.2.8 同時吸着範囲
複数のヘッドで同時吸着が可能かどうかを判断するためのパラメータです。同時
吸着が可能な吸着位置(XY)、高さ(Z)、角度(R)の許容範囲です。通常、
「XYZ」は0.3 mm程度に、「R」は 1.0 度程度に設定します。
1.2.9 QFP装着浮代
ヘッドが下降してQFP を吸装着する際に強い衝撃を与えると、リードピンが曲
がることがあります。これを避けるために、QFP シーケンス(ソフトランディ
ング)吸装着を行います。このQFP シーケンスを実行するときの Z 軸のスト
ローク量をここに設定します。通常4mm 程度に設定します。0.00 に設定する
とソフトランディングは行いません。設定変更は、[INS]・[DEL]・[SPACE]キー
を押してください。
1.2.10チェンジタイマー/ ソクド
チェンジタイマー「X」は、ノズル交換を行う際にヘッドが下降端で停止する時
間です。(単位は msec)標準値は 200msec 前後ですが、ノズル交換に失敗す
る場合は少し大きめの値を入れてください。最大1 秒(1000msec)まで設定
できます。
チェンジソクド「Y」は、ノズル交換するときのヘッド上昇 / 下降の相対スピー
ドです。通常100%で入力されていますが、ノズル交換に失敗する場合は少し
速度を下げてください。
60843119-03
対象名
X
機械座標
FINE角度
マルチカメラ
ロケートピン基準
基板外形基準
待機位置
廃棄位置
基板面/固定トレイ
両方向認識オフセット
同時吸着範囲
QFP装着浮代
チェンジタイマー/ソクド
リトライ回数の上限
廃棄ステーション位置1 0
廃棄ステーション位置2 0
移動可能高さ
YZ
編集中
0.00
16.22
16.22
16.22
0.30
0.00
0.00
0.00
470.00
195.00
195.00
106.38
106.38
0.00
0.30
100.00
0.00
0.00
14.29
14.29
75.15
75.15
0.76
0.30
200.00
0.00
0.00
R
フィーダー
0.00
0.00
0.00
-60.00
16.95
-0.01
1.00
50
1
1
種類
0.03
連続タイプ
通常
300
4.00
7回
編集対象