SER08989020_YV64 Service_J.pdf - 第50页
3- 29 SER08989020 調整 第 3 章 1 1.2.12 廃棄ステーション位置 オプションの部品廃棄ステーションをフィーダプレートにセットした場合、その 位置(X Y 座標)と高さ( Z 座標)を指定します。下記の手順でティーチングし ます。 (廃棄ステーションを使用しない場合は、 0.00 に設定します 。 ) 「廃棄ステーション」の「種類」欄には、廃棄ステーションに戻された部品を排 出位置に確実に送るまでの時間を 0 …
3-
28
SER08989020
調整
第
3
章
1
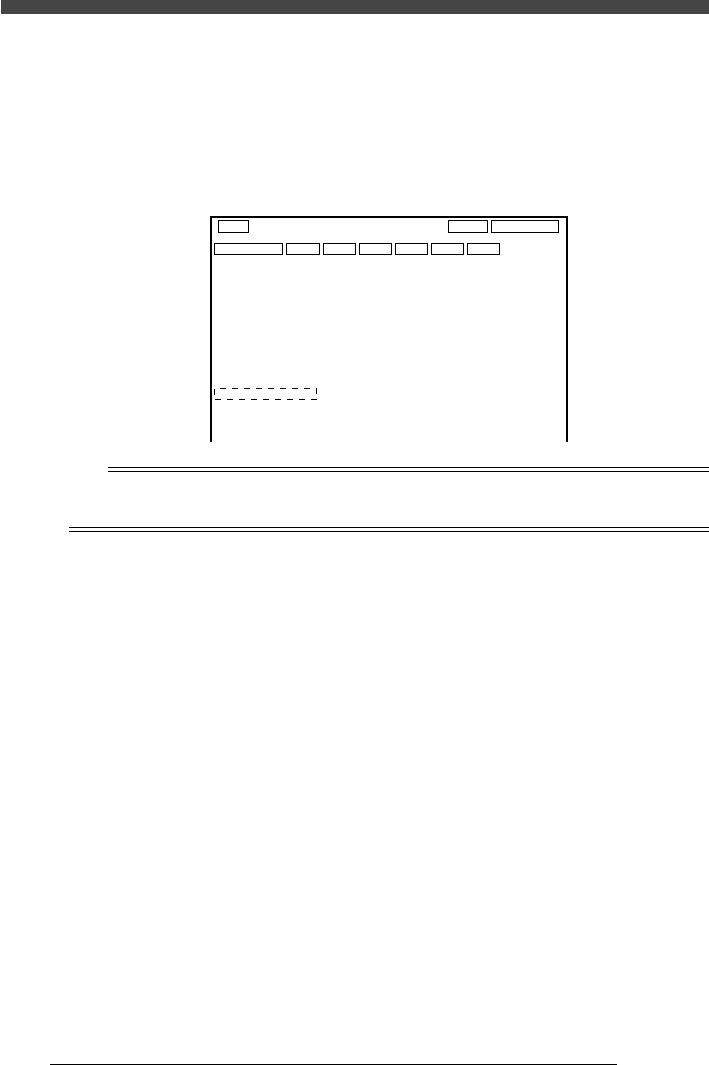
1.2.11リトライ回数の上限
吸着エラーや認識エラーが発生したとき、マシンがエラー停止するまでに実行す
るリトライ回数の上限を設定します。リトライ動作を実行したくないときは、
「即時停止」に設定します。設定変更は、[INS]・[DEL]・[SPACE]キーを押してく
ださい。
60843120-03
対象名
X
機械座標
FINE角度
マルチカメラ
ロケートピン基準
基板外形基準
待機位置
廃棄位置
基板面/固定トレイ
両方向認識オフセット
同時吸着範囲
QFP装着浮代
チェンジタイマー/ソクド
リトライ回数の上限
廃棄ステーション位置1 0
廃棄ステーション位置2 0
移動可能高さ
YZ
編集中
0.00
16.22
16.22
16.22
0.30
0.00
0.00
0.00
470.00
195.00
195.00
106.38
106.38
0.00
0.30
100.00
0.00
0.00
14.29
14.29
75.15
75.15
0.76
0.30
200.00
0.00
0.00
R
フィーダー
0.00
0.00
0.00
-60.00
16.95
-0.01
1.00
50
1
1
種類
0.03
連続タイプ
通常
300
4.00
7回
編集対象
参考
リトライ回数は部品ごとにも設定でき、ここに設定したリトライ回数の上限と比較し、少ない方の
回数だけリトライが実行されます。
3-
29
SER08989020
調整
第
3
章
1
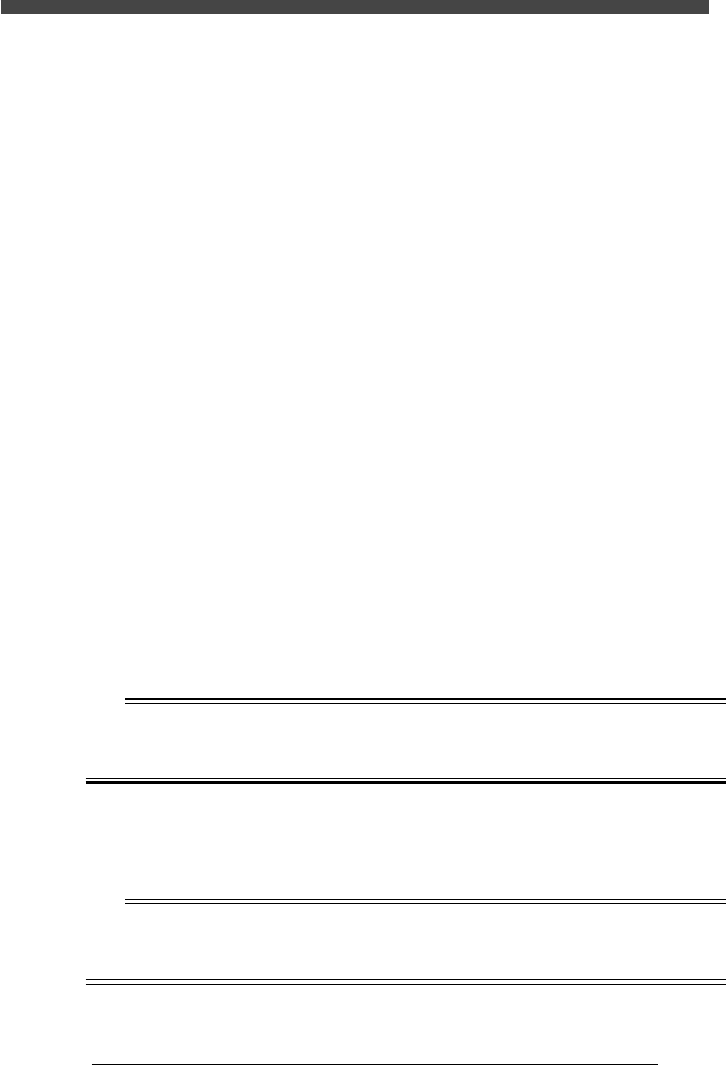
1.2.12廃棄ステーション位置
オプションの部品廃棄ステーションをフィーダプレートにセットした場合、その
位置(XY 座標)と高さ(Z 座標)を指定します。下記の手順でティーチングし
ます。(廃棄ステーションを使用しない場合は、0.00 に設定します。)
「廃棄ステーション」の「種類」欄には、廃棄ステーションに戻された部品を排
出位置に確実に送るまでの時間を0 ∼9 の範囲で設定します。それに 0.25をか
けた値が実際のタイマー(秒)になります。
「廃棄ステーション」の「フィーダー」欄には、廃棄ステーションを駆動する
フィーダー番号を指定します。フィーダー番号はフィーダー8本単位の最初の番
号を指定してください。(例えば、1、9、 17、25 etc.) フィーダー番号に 0 が
指定されると、廃棄ステーションがないものと判断します。
e
1
非常停止ボタンを押してから、廃棄ステーションをフィーダプ
レートにセットします。
2
非常停止を解除します。
安全を確認してから、非常停止ボタンを回転解除し、YPU の[READY]ボタン
を押してください。
e
3
ヘッド1 にノズルを取り付けます。
「3/3/A5 ノズルチェンジ」コマンドを実行して、ヘッド1 にタイプ33 を付
けてください。(オートノズルチェンジャーが付いていない場合は、非常停止
ボタンを押してから、手でノズルを交換してください。)
w
警告「
ノズルチェンジ」コマンドを実行すると、ヘッド部がノズルステーションに移動します。体の一部
がヘッド可動範囲に絶対に入らないようにしてください。(指定ノズルが付いている場合はヘッド
部は動きません。)
4
「3/3/B4 ティーチング実行条件」を指定します。
ティーチングユニットは「ヘッド1」を指定してください。運転速度はどれを
選択してもかまいません。
参考
マシン調整モードでティーチング実行条件を指定する場合、運転速度はどれを選択しても、安全の
ため最初は最低速度(SPEED 5=20)に設定されます。速度を変更するには、ティーチング実行条
件を指定した後、YPUの[SPEED]キーを押してください。
3-
30
SER08989020
調整
第
3
章
1
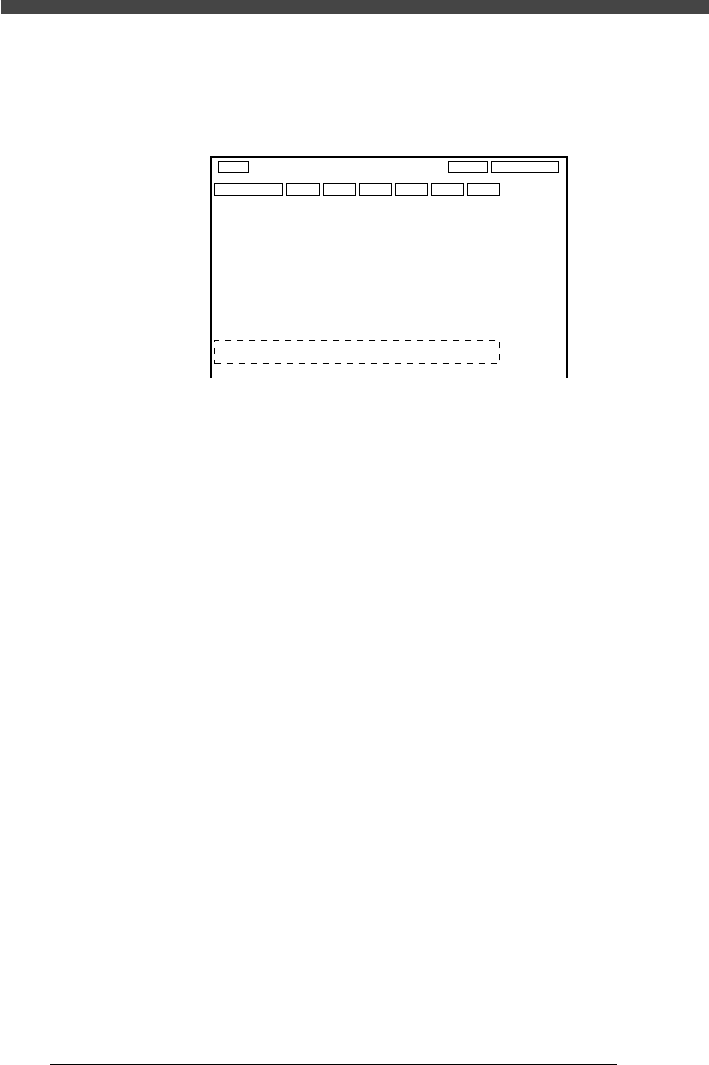
5
機械座標の画面を開きます。
「3/3/B1 調整項目選択」→「機械座標」を選択実行してください。
6
カーソルを「廃棄ステーション位置」の「X」に合わせます。
60843121-03
対象名
X
機械座標
FINE角度
マルチカメラ
ロケートピン基準
基板外形基準
待機位置
廃棄位置
基板面/固定トレイ
両方向認識オフセット
同時吸着範囲
QFP装着浮代
チェンジタイマー/ソクド
リトライ回数の上限
廃棄ステーション位置1 0
廃棄ステーション位置2 0
移動可能高さ
YZ
編集中
0.00
16.22
16.22
16.22
0.30
0.00
0.00
0.00
470.00
195.00
195.00
106.38
106.38
0.00
0.30
100.00
0.00
0.00
14.29
14.29
75.15
75.15
0.76
0.30
200.00
0.00
0.00
R
フィーダー
0.00
0.00
0.00
-60.00
16.95
-0.01
1.00
50
1
1
種類
0.03
連続タイプ
通常
300
4.00
7回
編集対象
7
ヘッド1 を廃棄ステーション上に移動させます。
YPU のジョイスティックを操作して、ヘッド1 が廃棄ステーションの部品受
け位置の真上に来るようにします。
d
8
XY 座標のティーチングを実行します。
1. [F10]キーを2回押して、X 座標のティーチングを実行します。
0
2. 次に、カーソルを「廃棄ステーション位置」の「Y」に合わせます。
3. [F10]キーを2回押して、Y 座標のティーチングを実行します。
0
9
カーソルを「廃棄ステーション位置」の「Z」に合わせ、Z 座
標を入力します。
Z 座標は「基板面高さ」と同じ数値を入力してください。
0
設定データを保存します。
[ESC]キーを押してから、「B2 調整後データ保存」または「B0 データ保存後
終了」を選択実行してください。(保存したくない場合は、「B3 調整前データ
復活」または「B7 強制終了」を選択実行してください。)