00198828-01_SM_X-Series-S_Hxxxx_DE.pdf - 第288页
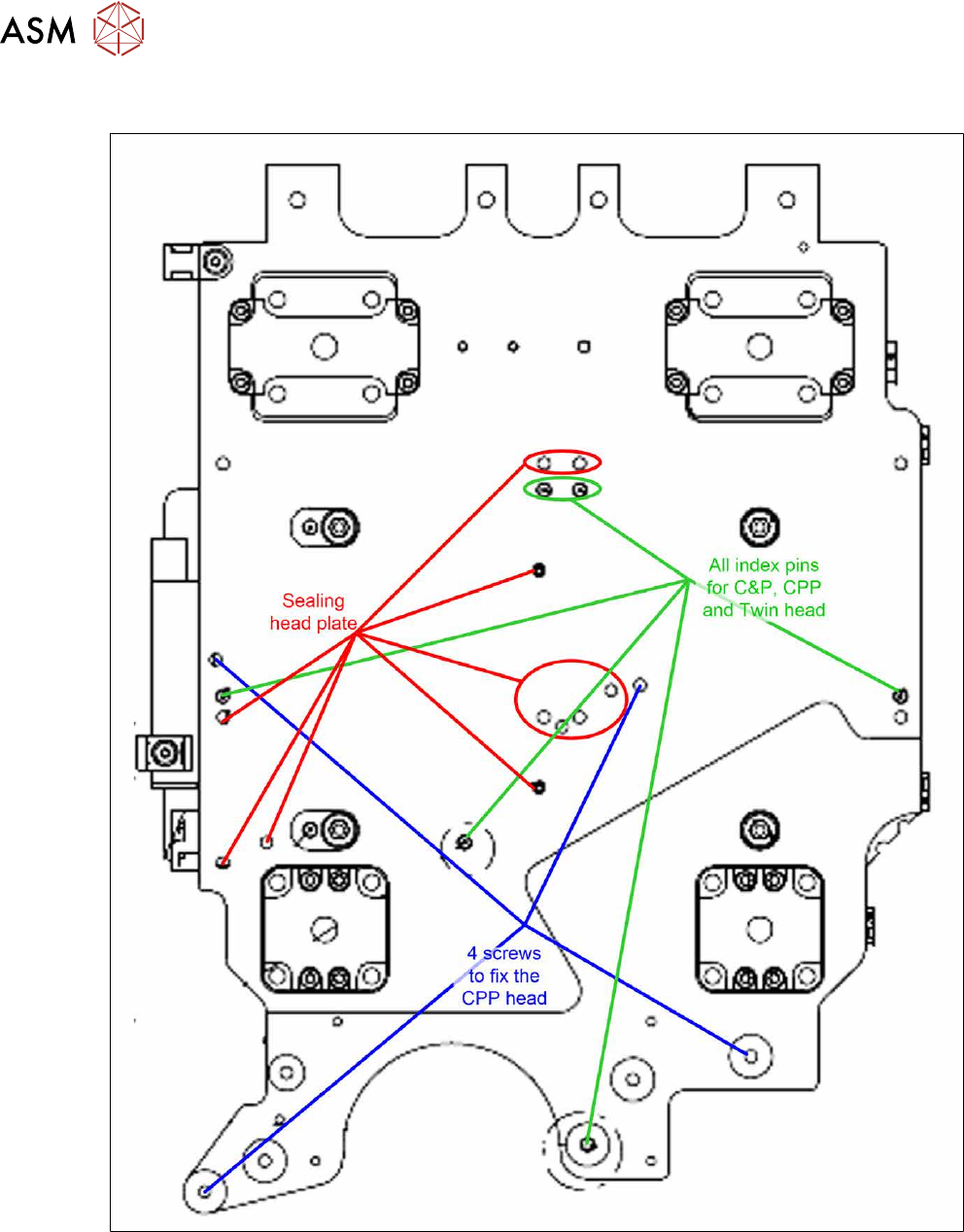
8 Kopftausch 8.9 Montagepositionen auf der Kopfplatte 288 Serviceanleitung SIPLACE X-Serie S (ab Hxxxx) 01/2021 8.9 Montagepositionen auf der Kopfplatte Abb.373: Montagepositionen auf der Kopfplatte
8 Kopftausch
8.8 SIPLACE Twin tauschen
Serviceanleitung SIPLACE X-Serie S (ab Hxxxx) 01/2021 287
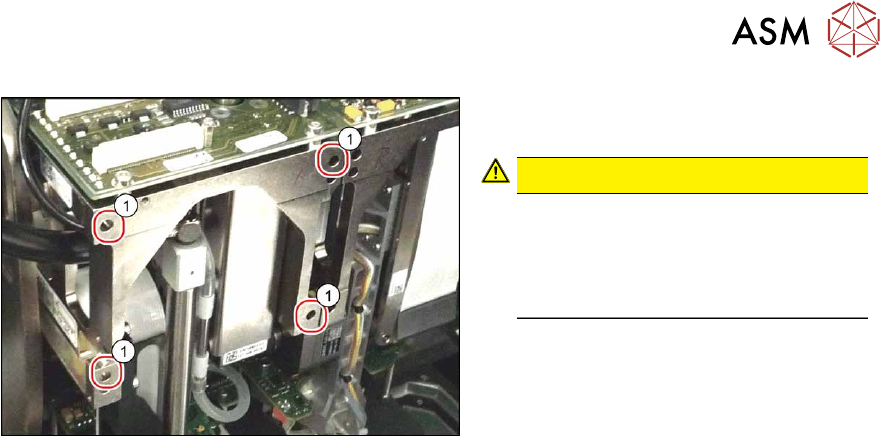
Abb.372: Befestigungsschrauben
► Drehen Sie die ersten drei Befesti-
gungsschrauben heraus.
VORSICHT!
Festhalten!
Halten Sie das Modul fest bevor Sie
die letzte der vier Schrauben entfer-
nen. Ansonsten kann das Modul
herunterfallen.
.
► Drehen Sie die vierte Befestigungs-
schraube heraus und ziehen Sie das
Modul aus der Verstiftung.
► Setzen Sie den Bestückkopf in die Transportbox.
► Wenn Sie an diesem Bestückkopf weitere Arbeiten ausführen (z.B. Austausch von Ersatztei-
len), dann montieren Sie den Bestückkopf dazu auf den Kopfständer [03056231‑xx].
Einbau
Verfahren Sie für den Einbau in umgekehrter Reihenfolge. Beachten Sie dabei folgende Hinweise:
► Montieren Sie ggf. die Befestigungsschrauben auf die andere Seite des Moduls (s.o.).
► Notieren Sie sich die Kraftwerte für das neue Modul. Diese Kraftwerte sind auf einem Aufkle-
ber notiert, der sich seitlich am Modul befindet.
► Achten Sie auf die korrekte Montageposition.
► Führen Sie eine Kopf-Kalibrierung durch.
Sehen Sie dazu auch...
2 8.9 "Montagepositionen auf der Kopfplatte" [}288]
2 8.10 "Kalibrierung" [}289]
8 Kopftausch
8.9 Montagepositionen auf der Kopfplatte
288 Serviceanleitung SIPLACE X-Serie S (ab Hxxxx) 01/2021
8.9 Montagepositionen auf der Kopfplatte
Abb.373: Montagepositionen auf der Kopfplatte
8 Kopftausch
8.10 Kalibrierung
Serviceanleitung SIPLACE X-Serie S (ab Hxxxx) 01/2021 289
8.10 Kalibrierung
Übersicht
Bei der Kalibrierung der BE-Kamera werden die folgenden Werte bestimmt:
●
Verhältnis von Pixelgröße der Kamera zur Auflösung des Messsystems der Maschine (X,Y)
●
Kameramittelpunkt in X- und Y- Richtung
●
Verdrehwinkel des CCD-Sensors in der Kamera
Danach werden der Kopf-Offset und die Segment-Offsets oben und unten bestimmt.
●
Kopf-Offset: Der Kopf-Offset ist der Abstand zwischen der LP-Kamera und der Pipette (Seg-
ment1). Der Sollwert ist ein festgelegter Wert (X=0 und Y=‑105mm), zu dem ein Offset-Wert
(aus der Kopfkalibrierung) dazugerechnet wird.
●
Segment-Offset oben: Beim Segment-Offset oben wird das Kalibrierteil in der BE-Kamera in
0°-, 90°-, 180°- und 270°-Schritten gedreht. Dabei wird der rotierende Mittelpunkt der
Pipettenspitze in Bezug auf die BE-Kameramitte in X- und Y-Richtung ermittelt.
●
Segment-Offset unten: Beim Segment-Offset unten wird das Kalibrierteil in 0°-, 90°-, 180°-
und 270°-Lage aufgenommen und vermessen. Dabei wird der rotierende Mittelpunkt der
Pipettenspitze bei ausgefahrener Z- Achse in Bezug auf die LP-Kamera ermittelt. Das Seg-
ment1 ist die Referenz (X=0,Y=0) zu den anderen Segmenten.
8.10.1 Ablauf der Kalibrierung
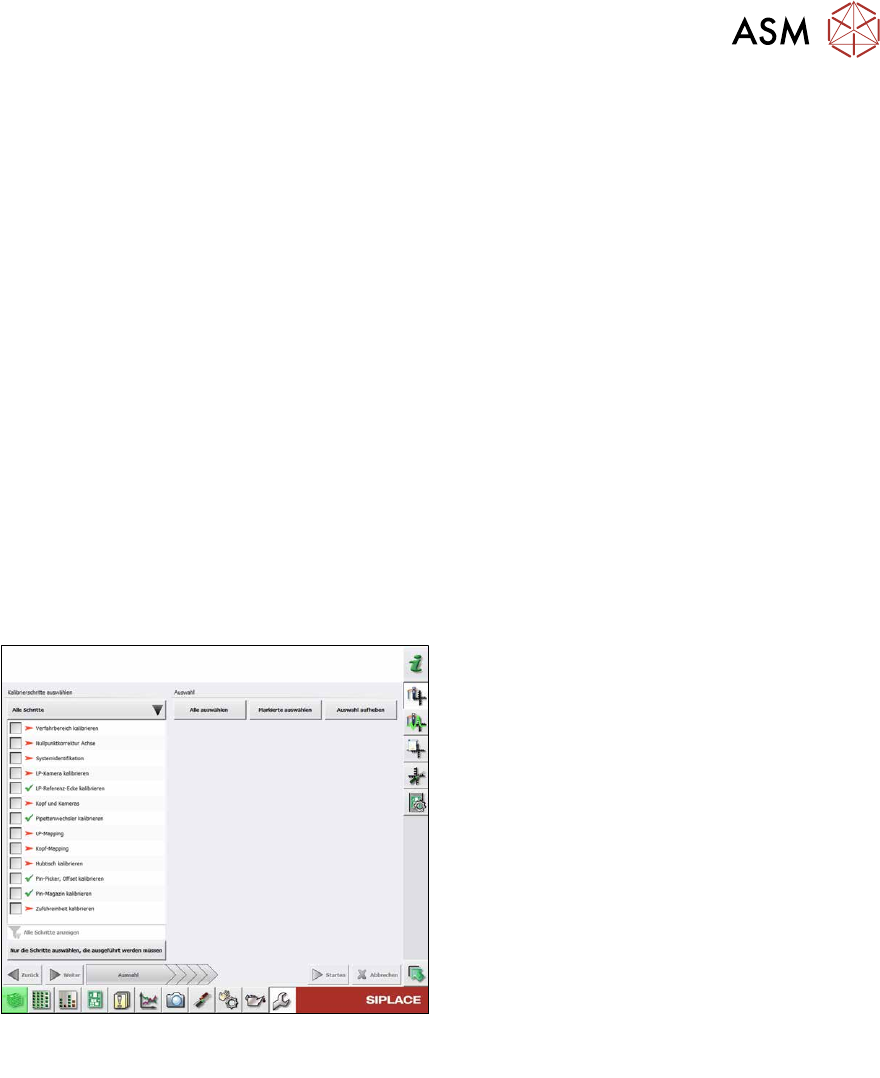
Abb.374: Kalibrieren – Alle Schritte
Alle Schritte
●
Verfahrbereich kalibrieren
●
Nullpunktkorrektur Achse
●
Systemidentifikation
●
LP-Kamera kalibrieren
●
LP-Referenz-Ecke kalibrieren
●
Kopf und Kameras
●
Pipettenwechsler kalibrieren
●
LP-Mapping
●
Kopf-Mapping
●
Hubtisch kalibrieren
●
Pin-Picker, Offset kalibrieren
●
Pin-Magazin kalibrieren
●
Zuführeinheit kalibrieren
Detaillierter Ablauf
► Verfahrbereich kalibrieren
– Kalibrierung der min/max Verfahrwege der Portale
► Nullpunktkorrektur Achse
► Systemidentifikation
– Ermittlung der bewegten Masse, Reibung und Motor-Kraftkonstante der gewählten Achse
um eine bessere Positioniergüte der Achse zu erreichen.