CX-1_使用说明书.pdf - 第93页
第 1 部 基本编 第 1 章 设备概要 1-6-3-3 图像识别的限制事项 进行元件的图像识别时,对识别元件各有以下限制事项。 ① 用 VCS 识别引脚元件时的限制事项 • 每一边最少要有 7 支引脚。 虽然最少 2 支也可以识别, 但不能保证精度。 进行一次性识别 (统 一识别)时,最多为 128 支。分割 2 次识别时(1×2) ,为 256 支。 • 用 2 种以上的 VCS 对可识别间距的元件进行识别时,分辨率高的 VCS 识…
第 1 部 基本编 第 1 章 设备概要
(1) 外形识别元件
• 识别角
识别直方体形状元件的角。该角引脚需为 R0.5mm 以下、2.0mm 以上的直线的夹角。
• 识别边
识别直方体形状元件的边。该边需为元件尺寸 1/2 以上,直线边长大于 3mm,可识别距离边
的中心±1.5mm 位置的直线边。
• 测出重心
用元件的重心和惯性转矩的倾斜度测出。
* 外形识别元件不能进行分割识别。
(2) 通用图像元件
(复合数组
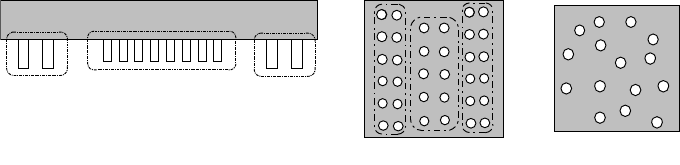
通用图像元件是指:多种间距连接器、复合阵列 )BGA、分散配列 FBGA 等引脚间距
尺寸不同的引脚元件、球排列间距不同的球元件、以及需要将外形或标记一起识别的连接器(引脚元
件)等可以用通用元件数据处理的元件种类。
• 通用图像元件,是将元件按识别对象要素 (=要素。指引脚、球等)分开,将具有相同要素的
区域分组(要素组)定义,由多个组构成。
• 要素可以从引脚、球、land、角、边、标记中选择。边、角的识别与外形识别元件的识别要素
相同。标记形状与区域标记相同,尺寸为 2.0mm 以上 10.0mm 以下。
• 1 个组(要素组),是指一个识别对象要素(element),以同一尺寸、同一间距、配置多个构成
为组。球/ land 的排列即使长、宽间距不等,也可以构成同一组。角、边、标记,视为 1 个组。
• 对排成 1 列、但引脚长短交叉的连接器等,可以分成长引脚组、短引脚组,在重叠的同一区
域内指定各组进行识别。同样,对交错式排列的 BGA,可采取错开半间距分组识别的方式。
除上述各组之外,位置任意配置的同一尺寸的球/ land,可视为扩展阵列(扩展数组)方式编
为 1 个组。
グループ2ループ1
グループ3
グ
グループ
ループ1
3
グ
拡張アレイ
组 1 组 2 组 3
复合阵列(复合数
グループ2
组 1 组 2 组 3
组
)
1-72
第 1 部 基本编 第 1 章 设备概要
1-6-3-3 图像识别的限制事项
进行元件的图像识别时,对识别元件各有以下限制事项。
① 用 VCS 识别引脚元件时的限制事项
• 每一边最少要有 7 支引脚。虽然最少 2 支也可以识别,但不能保证精度。进行一次性识别(统
一识别)时,最多为 128 支。分割 2 次识别时(1×2),为 256 支。
• 用 2 种以上的 VCS 对可识别间距的元件进行识别时,分辨率高的 VCS 识别所需时间虽然长,
但识别精度不一定会提高(特别是 PLCC、SOJ、连接器等因引脚形状细小,有时识别精度不一
定会更好) 。
• QFN 元件的 4 边中最少 1 边要有 2 支以上的引脚,其他 3 边要有 1 支以上的引脚。
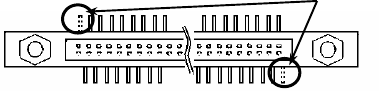
• Z 引脚连接器,前提是下边的引脚需向右侧错位半间距(俯视图)。如果上边的引脚向右侧错
位时,设置时必须指定上边左侧和下边右侧各缺少 1 支引脚。
缺少的引脚
② 用 VCS 识别区域扩展阵列(扩展数组)(BGA、FBGA)时的限制事项
• 以球的布局呈格子状(或黑白方格间隔行交错排列)的、可以矩阵形式排列的元件为对象。
• 基体只以 PWB 型的 BGA 为对象,基体为陶瓷的不能保证精度。焊接球与焊接球焊接的基板两
者明暗之差不明显的,不能保证识别精度。
• 以焊接球径同一模式焊接、无法独立识别球时,不能保证识别精度。
• 焊接球安装的基板部有与焊接球同一直径的空洞时,不能保证识别精度。
• 间距符合规定、而球的直径不符合规定的,需要用选购项的高分辨率 VCS 进行识别。没有该
VCS 选购项的,则不能进行识别。
• 高分辨率 VCS 的球的数量,视野 27mm 为 16~2601 个,视野 10mm 最多为 10000 个。 (FBGA 按
间距 0.5mm、□25mm 换算)。分割识别时的球数量超过 2601 个时,请用通用图像元件进行识
别。交错状布局的球识别量,最大数量为 625 个。
• 球的布局可延伸到周边。可在任意位置上设定缺球。
• 识别时的判断项目为:检查元件的重心/倾斜、有无球 (在应该有球的位置上测不出球时)、
球的布局 (测出的球间距与设定的间距不同时)、变形 (面积)、直径 (直径的检查精度在直
径±50% 以下时,可识别的间距和可识别的球径会受很大限制)。
1-73
第 1 部 基本编 第 1 章 设备概要
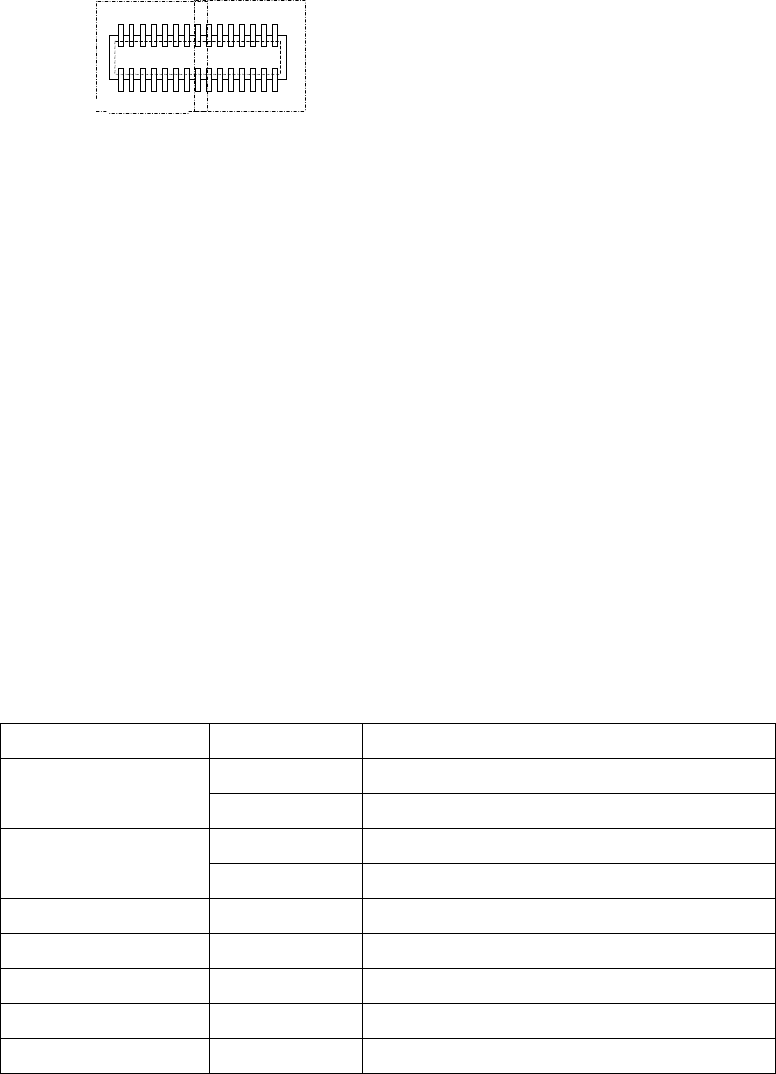
③ 用 VCS 分割识别大型元件的限制事项
• 对象元件为:无法纳入 VCS 一次性识别视野范围的大型连接器、BGA、QFP、SOP、通用图像元
件。
• 引脚间距范围为 0.4mm~1.27mm,分割识别的视野数,只限连续 2 个视野(1×2)。
图 1-6-6 分割识别 (1×2) 示例
④ 用 VCS 对元件进行外形识别时的限制事项
• 识别角时,角度应为 90°±0.5°以内。
• 识别角时,角部突出部分长度限于该边长度的 10% 以内。
• 识别边时,两个边(或边的延长)的夹角限于 90°±0.5°以内。
• 识别角或边时,4 角或 4 边不在指定范围内的,不能保证识别精度。
• 测量重心时,元件的长宽尺寸比例不满 1:2 的,不能保证倾斜精度。
• 角、边直线部分的平坦度,均须为 0.1mm 以内。
• 无论是识别角或边,边缘的厚度须在 0.3mm 以上。
1-6-3-4 用VCS识别通用图像元件时的限制事项
将元件作为通用图像元件进行识别时,有以下的限制事项。
识别引脚、球等元件形状,还受下列①~③事项的限制。
此外,精度已知的通用图像元件,也请作为必须进行元素(特别是引脚)识别的对象处理。如果
按位置精度不均的元素组(特别是引脚)处理,容易识别错误。
• 可定义的最多件数/ 可处理的最大数量
项目 数 备注
20 组 1 个元件(可定义/处理)的数量 元素组
1024 组 1 个生产程序可以处理的数量
40 组 1 个元件(可定义/处理)的数量 扩展阵列组
(扩展数组)
256 组 1 个生产程序可以处理的数量
384 支
*1
1 个元素组(可定义/处理)的数量 引脚数
6936 個
*1
1 个元素组(可定义/处理)的数量 球数
4 处 1 个元素组(可定义/处理)的数量
*2
引脚 / 缺球定义
角、边、标记 4 处 1 个元件(可定义/处理)的数量
角、边、标记 1 处 1 个元素组(可定义/处理)的数量
*1
: 包括缺引脚、缺球的数量。
*2
: 缺数超过 4 处的,应再分为元素组,分开定义。
1-74