YV180X_Mainte_E.pdf - 第83页
4 -25 SED8013110 Service Manual Chapter 4 4 Machine adjust mode Simultaneous pickup area (Simul. pickarea) This parameter is used to determine whether multiple heads can pick up components simultaneously . 47417-D8-A0 X …
4
-24
Service Manual
Chapter 4
SED8013110
4
Machine adjust mode
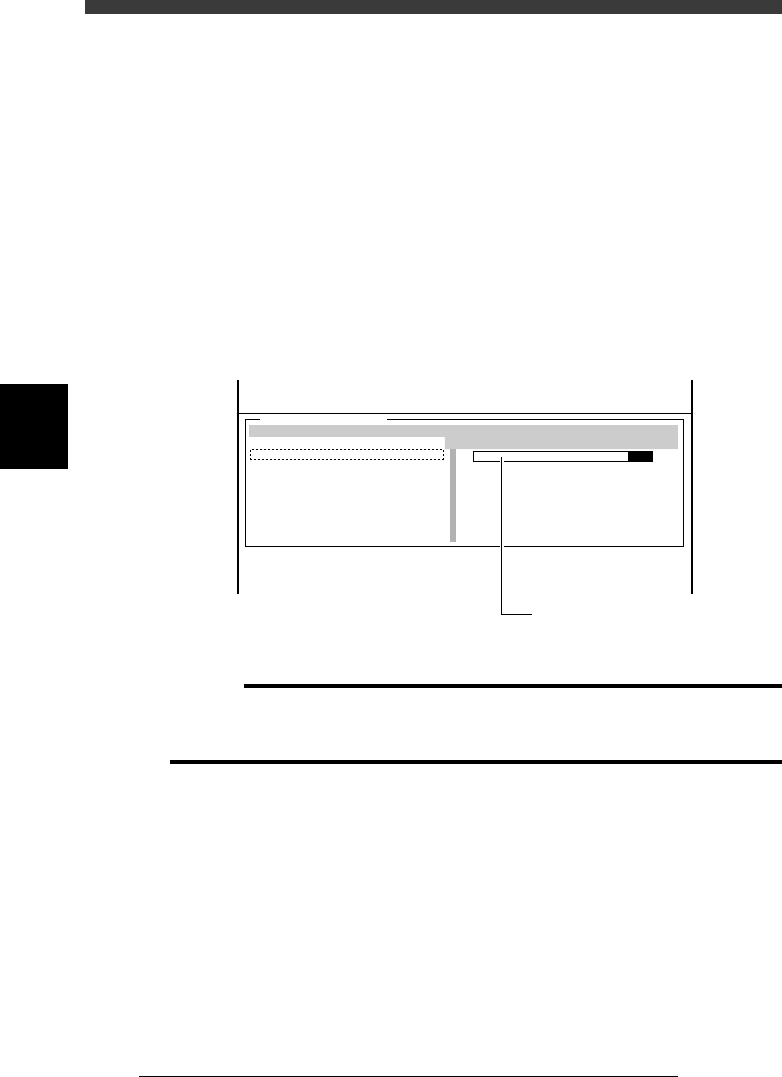
6 Generate vacuum for Head 1.
Check that the cursor is placed on the first line (Head 1) and then press the
[ENTER} key to generate a vacuum. The vacuum level bar graph appears
on the right side.
7 Lower the head assembly while checking the vacuum
sensor level and the Z coordinate.
1. Manipulate the YPU joystick to lower the head assembly.
When the nozzle tip of Head 1 reaches the surface of the conveyor rail,
the CURRENT vacuum level of Head 1 increases and the green zone of
the bar graph extends to the right.
2. Stop lowering the head assembly when the vacuum sensor level
reaches the maximum (entire bar graph turns green). The head
assembly height at this point is the PCB height, so make a note of the
Z1 (or Z2) coordinate value shown on the lower part of the operation
monitor.
47416-C0-00
[ ↑ ] [ ↓ ] : Select Head [Enter]: Vacuum ON/OFF
VACUUM SENSOR LEVEL
CURRENT
0
0
0
0
0
0
0
0
MAXIMUM
0
0
0
0
0
0
0
0
MINIMUM
0
0
0
0
0
0
0
0
HEAD
A
A
A
A
A
A
A
A
From Machine Origin X1= Y1= Z1= R1=
<<<APPLICATION>>> 3/MAINTE/M
<<MODE>> 4/MANUAL
<COMMAND_LIST> A/IO_UTILITY
[Esc]: Exit
[Space]: Freeze Display
Check the Z-axis coordinate
when the entire bar graph
turns green.
c
Caution
Type 72 nozzle is a spring-action type, so do not keep lowering the nozzle tip after the
vacuum sensor level reaches the maximum. Otherwise, the correct PCB height
coordinate cannot be measured.
8 Repeat the same procedure for other heads and calculate
the average PCB height.
9 Open the “Position” screen.
Select <3/3/B1 ADJUST TARGET> − “Position” and press the [ENTER] key.
0 Enter the “Z” coordinate of the PCB Height parameter.
Use the arrow keys to move the cursor to “Z” in the “PCB Height” row and
enter the average PCB height you calculated.
q Save the settings.
Press the [ESC] key, then select <B2 SAVE DATA> or <B0 SAVE & QUIT>
and press the [ENTER] key. (To quit without saving, select <B3 RECOVER
ADJUST> or <B7 QUIT> and press the [ENTER] key.)

4
-25
SED8013110
Service Manual
Chapter 4
4
Machine adjust mode
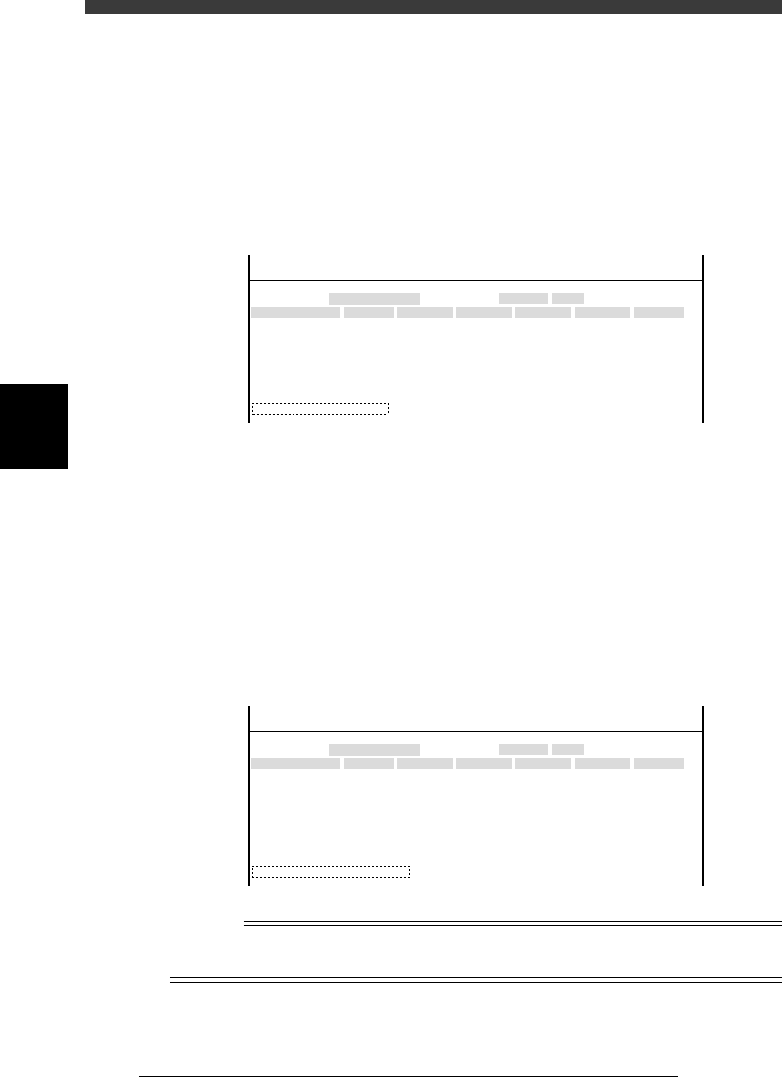
Simultaneous pickup area (Simul. pickarea)
This parameter is used to determine whether multiple heads can pick up
components simultaneously.
47417-D8-A0
X
-28.280
-28.280
562.000
255.916
0.500
Object
FINE mode
Locate pin
Edge Clamp
Wait point
Discard point
PCB Height
Simul. pickarea
Type
NORMAL
100
DUMP
OBJECT
Position
TCH. UNIT SPEED
- - - - - - - -
A
A
A
A
A
A
Y
0.005
118.810
118.810
0.000
71.321
0.5000
Z
0.000
0.000
17.480
0.500
R
0.000
0.000
0.000
0.000
17.480
0.200
Feeder
100
<<<APPLICATION>>> 3/MAINTE/M
<<MODE>> 2/MCH_DATA
X Allowable range of pickup position (XY) for standard size
components (both X and Y sizes are larger than 0.65mm).
Default setting is 0.35mm.
Y Allowable range of pickup position (XY) for small size
components (either X or Y size is smaller than 0.65mm).
Default setting is 0.20mm.
Z Allowable range of pickup position (Z) for standard size
components (both X and Y sizes are larger than 0.65mm).
Default setting is 0.30mm.
R Allowable range of pickup height (Z) for small size compo-
nents (either X or Y size is smaller than 0.65mm). Default
setting is 0.20mm.
n
NOTE
When the Pos. Definition parameter in component information is set to “Automatic” like
tape feeders, the head offset values (see “2.2 Offset” in Chapter 3) affect simultaneous
pickup. (If the head offset values are larger than the allowable range specified here, then
simultaneous pickup is not performed.)
4
-26
Service Manual
Chapter 4
SED8013110
4
Machine adjust mode
QFP clearance
If a large impact is applied to a QFP at the instant the head lowers to pick
up or mount it, the lead pins may bend. To avoid this, the soft landing
pickup or mount is effective. This parameter specifies the Z-axis stroke to
perform the soft landing and is typically set at around 4.00 (mm). Soft
landing is not performed when set to "0.00". Use the [SPACE], [INS] or
[DEL] key to make this setting.
47418-D8-00
X
-28.280
-28.280
562.000
255.916
0.500
Object
FINE mode
Locate pin
Edge Clamp
Wait point
Discard point
PCB Height
Simul. pickarea
QFP clearance
Type
NORMAL
100
DUMP
4.00
OBJECT
Position
TCH. UNIT SPEED
- - - - - - - -
A
A
A
A
A
A
A
Y
0.005
118.810
118.810
0.000
71.321
0.5000
Z
0.000
0.000
17.480
0.500
R
0.000
0.000
0.000
0.000
17.480
0.200
Feeder
100
<<<APPLICATION>>> 3/MAINTE/M
<<MODE>> 2/MCH_DATA
Retry Limit
This is the maximum number of retries that the mounter is allowed to retry
component pickup or recognition when a pickup error or recognition error
occurs. This parameter can be any value from 1 to 14. Use the [SPACE],
[INS] or [DEL] key to change the setting. When you do not want to allow
retries, set this parameter to “NO RETRY”.
47419-D8-00
X
-28.280
-28.280
562.000
255.916
0.500
Object
FINE mode
Locate pin
Edge Clamp
Wait point
Discard point
PCB Height
Simul. pickarea
QFP clearance
Retry Limit.
Type
NORMAL
100
DUMP
4.00
NO RETRY
OBJECT
Position
TCH. UNIT SPEED
- - - - - - - -
A
A
A
A
A
A
A
A
Y
0.005
118.810
118.810
0.000
71.321
0.5000
Z
0.000
0.000
17.480
0.500
R
0.000
0.000
0.000
0.000
17.480
0.200
Feeder
100
<<<APPLICATION>>> 3/MAINTE/M
<<MODE>> 2/MCH_DATA
Reference
The number of retries can also be specified for each component to be mounted. In this
case, retry is performed a certain number of times up to a minimum setting.