YCP10 Users_E.pdf - 第139页
5-8 5 Cr eating and setting the data Q: Board Press (option) T he board press unit holds down the board surface to correct the overall w arp. Set this parameter to "Use" when using the board press unit (option)…
5-7
5
Creating and setting the data
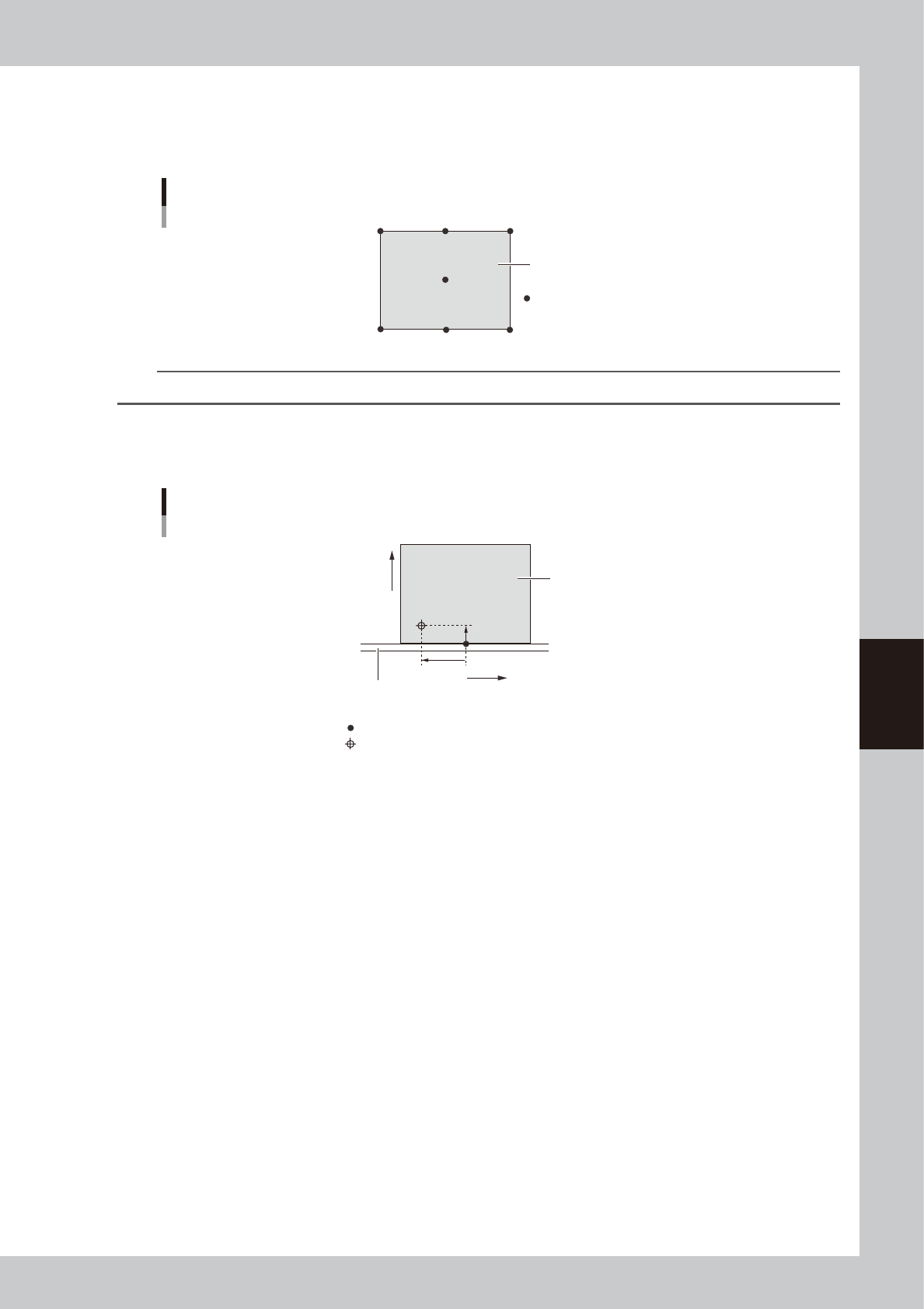
F: Board Datum Position
Set the reference position on a board select by selecting from "Center", "Front Center", "Rear Center", "Front Left", "Front
Right, "Rear Left" or "Rear Right" as shown below. On standard machines, this is set to "Front Left" as the default. All
coordinate positions on a board are specified relative to the "Board Datum Position" coordinates.
Board Datum Position
Board Datum Position
Board
63503-N1-00
TIP
The board has "Origin XY", "Fiducial (Mark)" and "Board Check Position" parameters as its setting positions .
G, H: Origin X, Y (mm)
If the fiducial mark on a board uses an origin different from the Board Datum Position, set the positional offset (mm) here
as the Origin XY.
Board Datum Position and Board origin
X-
X+
+Y
+Y
Fixed (front) conveyor rail
Board
Board Datum Position (Front Center)
Board origin
63504-N1-00
I: Spin Timer (sec)
Set to "1" second for normal shape boards. If specially configured boards (for example, boards with cutouts or through-
holes) are used and the conveyor exit sensor cannot detect them correctly, try setting this timer between 0.0 and 9.9
seconds. The conveyor motor continues turning for the specified time even after the board sensor turns off.
J: Board Vacuum
This parameter is enabled only for machines equipped with an optional vacuum gripper. Set to "NotUse" in most cases.
When curved boards or thin boards are to be printed, setting this parameter to "Use" actuates the vacuum gripper to fix
the board from the backside. When this parameter is set to "Use", also specify an appropriate time (msec) in the "Vacuum
Timer" and "Board Vacuum Sequence" parameters.
K: Vacuum Timer (msec)
When the "Board Vacuum" parameter is set to "Use", set the timer (msec) here to initiate the next action after the push-up
plate has moved up. This parameter is enabled only for machines equipped with an optional vacuum gripper.
L: Board Vacuum Sequence
This parameter is enabled only when the "Board Vacuum" parameter is set to "Use". Set to "Before Clamp" to turn on the
vacuum gripper before clamping a board. Set to "After Clamp" to turn on the vacuum gripper after clamping a board.
M: Edge clamp
The edge clamps secure the board in the printing position by laterally pushing on the board edge. Set this parameter to
"Use" in most cases. If printing on boards which cannot be clamped from the edge such as thin ceramic boards, set to
"NotUse" and use a vacuum board gripper instead.
O: Board flap
Set whether to use the board flap that presses on the board edge from above.
Usually, set this parameter to "Use". Using the board flap corrects the upward warp of a board that might occur when
clamped.
5-8
5
Creating and setting the data
Q: Board Press (option)
The board press unit holds down the board surface to correct the overall warp. Set this parameter to "Use" when using
the board press unit (option) or to "NotUse" when not using that unit. (This parameter is available only for machines
equipped with an optional board press unit.)
R: Press Timer (msec) (option)
When an optional board press unit is used, set the length of time to press on a board.
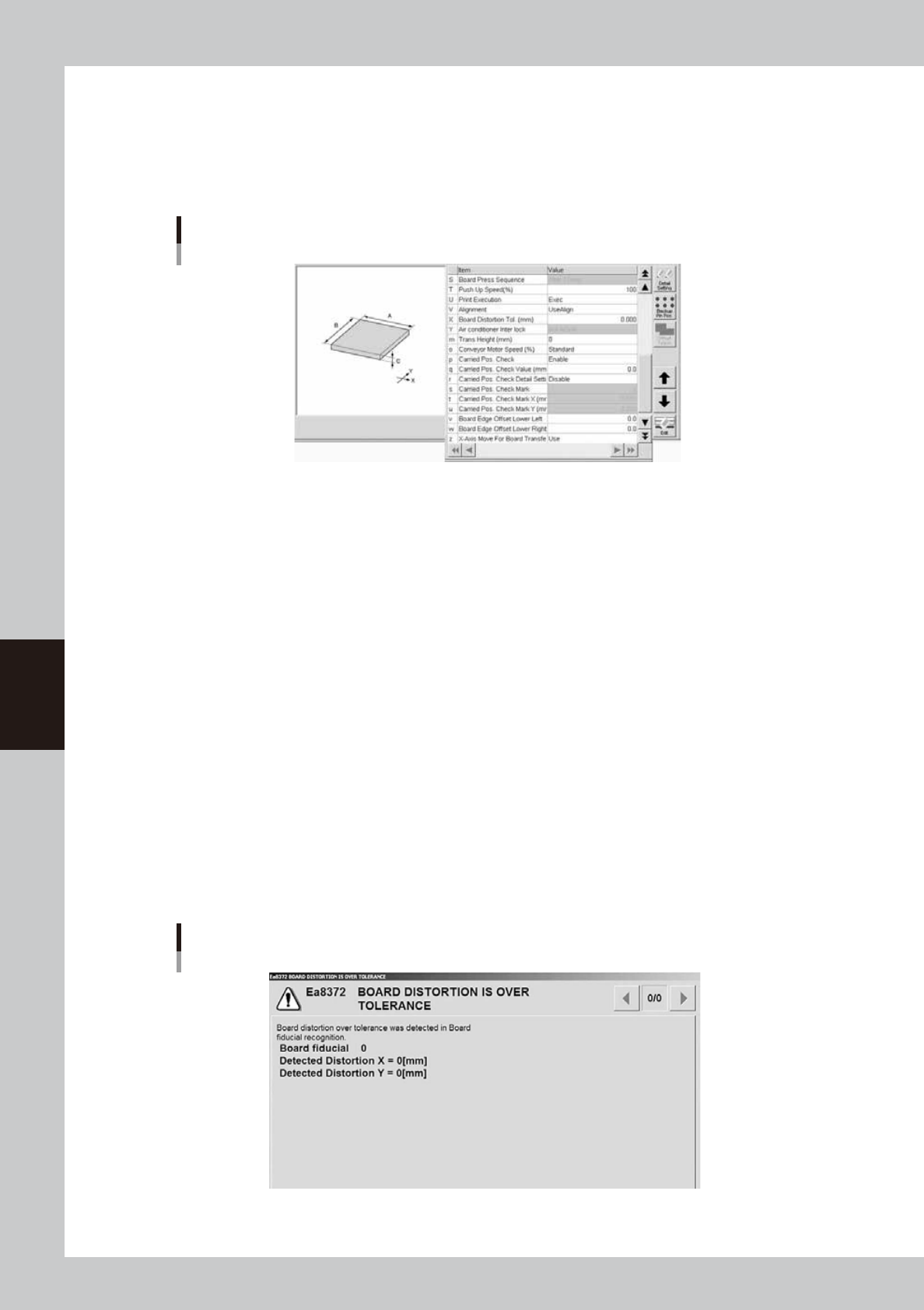
Board parameters (2)
64511-N1-00
S: Board Press Sequence (option)
When an optional board press unit is used, set whether to start pressing on a board before or after the edge clamp is
actuated.
T: Push Up Speed (%)
Specify the ascent/descent speeds for the push-up plate in percentage. Setting to "100" is acceptable in most cases, but
reduce it if you want to lessen the impact when the push-up jigs or pins move up against the board.
U: Print Execution
Select the operation mode from "Exec" or "Skip".
Exec : The machine performs solder printing.
Skip : The machine operates without applying any force.
V: Alignment
Select the processing method after fiducial mark recognition. Set to "UseAlign" in normal operation, and the machine
immediately stops when a mark recognition error occurs. When this is set to "IgnoreErr", the machine continues operation
even if a mark recognition error occurs.
X: Board Distortion Tol.
This parameter specifies the allowable distortion limit when checking the distortion component in the board fiducial
recognition position and local fiducial mark recognition positions on the board. The distortion check is not performed
when this parameter is set to "0.00".
If the distortion component calculated by recognizing the board fiducial marks or local fiducial marks during automatic
operation exceeds the allowable limit specified here, an error message box appears as shown below and the machine
stops. After closing the error message box, you can select whether to print solder on the board or to convey the board out
without printing solder according to the screen that appears.
Error message for board distortion
64512-N1-00
5-9
5
Creating and setting the data
Y: Air conditioner interlock (option)
When an optional temperature control unit is used, set whether or not to enable the interlock mechanism that functions
if an abnormal temperature is detected.
m: Trans Height (mm)
After components are mounted, the machine permits the conveyor to carry out the board when the push-up unit is
lowered. If components have already been mounted on the reverse side of the board, the push-up unit must be lowered
sufficiently to avoid interference from push-up pins with those components. This parameter specifies the height of the
push-up unit at which the conveyor is allowed to carry out each type of board. Enter a numeric value ranging from 0 to
50 mm showing how many millimeters the transfer height is lowered from the height of the bottom surface mounted
component or board warpage.
When this parameter is set at "0 mm", the transfer height lowers to the maximum down height.
o: Conveyor Motor Speed (%)
Change this parameter setting if you want to change the conveyor motor speed (board transport speed). The conveyor
motor speed can be increased up to "Standard+50%" (150% of "Standard" speed) or decreased down to "Standard-90%"
(10% of "Standard" speed) in 10% steps.
p: Carried Pos. Check
Enables/disables the conveyance position check. The standard setting is "Enable". When enabled, the board's position is
verified by the board vision camera which checks the board's 1st fiducial mark before the conveyed board is secured.
q: Carried Pos. Check Value (mm)
Enter a value that is used to judge whether or not the board position is corrected when checking the transfer position.
A value ranging from 0.0 to 5.0 mm can be entered.
If the mark position is beyond the set range, the board is moved by the mark shift amount.
(This parameter is enabled
only if the "o: Carried Pos. Check" item is set as "Enabled".)
r: Carried Pos. Detail Setting
Make this setting when a mark different from the fiducial mark or first point is used to check the transfer position. The
standard setting is "Disabled". (This parameter is enabled only if the "o: Carried Pos. Check" item is set as "Enabled".)
s: Carried Pos. Check Mark
Inputs the mark No. used for the conveyance position check detailed setting. The input value setting range is 0 to 128.
The recognition status of the mark used for the conveyance position check must be verified by performing a mark position
check, and the mark must then be registered in the mark information. (This parameter is enabled only if the "r: Carried
Pos. Detail Setting" item is set as "Enabled".)
t: Carried Pos. Check Mark X (mm)
Inputs the X-coordinate of the conveyance position check mark. (This parameter is enabled only if the "r: Carried Pos.
Detail Setting" item is set as "Enabled".)
u: Carried Pos. Check Mark Y (mm)
Inputs the Y-coordinate of the conveyance position check mark. (This parameter is enabled only if the "r: Carried Pos.
Detail Setting" item is set as "Enabled".)
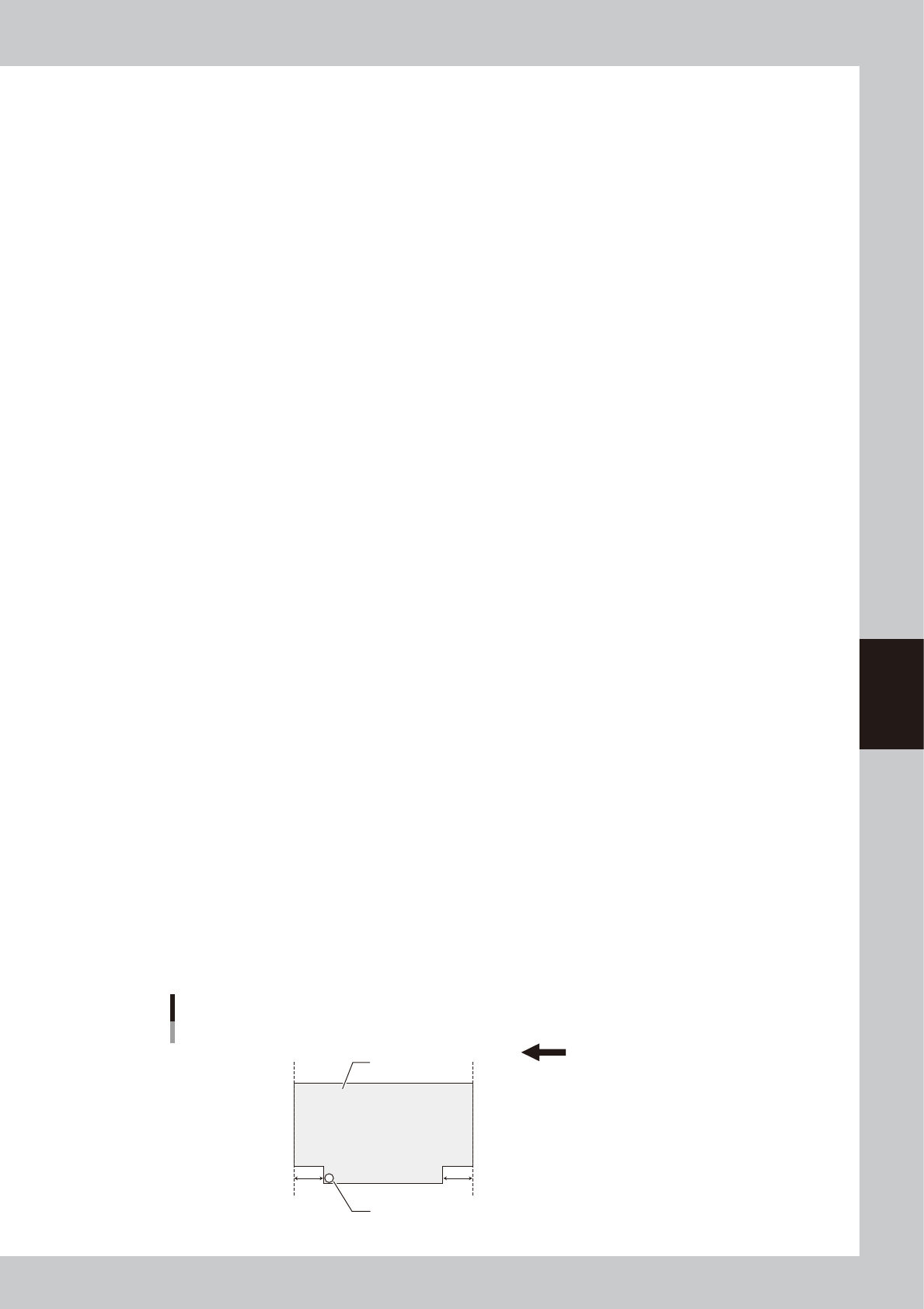
v: Board Edge Offset Lower Left, w: Board Edge Offset Lower Right
If the board edge cannot be detected by the board detection sensor due to board shape, press the [Offset Teach] button to
enter a distance from the board edge to the sensor detection position through teaching. The initial value is "0.0". When
the board edge offset function is not used, remain the initial value. (For details about teaching, see "3.2.2 Board edge
offset" in Chapter 3.)
Board edge offset
Board edge transfer direction (right → left)
Board edge
Board
Sensor detection position
Board edge
v w
63532-N1-00