KE-3010_20V_使用说明书.pdf - 第881页
第 2 部 功能详解编 第 9 章 手动控制 9-13 9-4-3 激光/传感器控制 从下拉菜单中选择 “Head(D)”-“ 激光/传感器控制 (L)” 或选择命 令按钮的 “ 激光/传感器控制 ” , 显示 如下 的激光/传感器控制画面。 (1) 状态 / 计测结果 在 “9-4-3-10 状态显示、计测结果 ” 中作详细介绍。 (2) 控制 Head 吸嘴选择 点击单选按钮,选择控制对象 Head 。 不受机器设置的 “ 使用单元…
第 2 部 功能详解编 第 9 章 手动控制
9-12
d)外圈照明控制(可选)
控制 OCC 外圈照明 ON/OFF 状态。与(b) 垂直照明控制的设置相同。
未设定选项时,不能选择。
e) 极性控制
控制 OCC 极性的正/反。
选中控制项目中的“极性控制”后,选择“正(P)”按钮、“反(N)”按钮、“正/反(S)”按钮,或“F3”键、
“F4”键、“F5”键进行控制。
2)BMR(坏板标记读入器)
a)XY 轴移动
与 Head 控制的 XY 轴的移动相同。
b)传感器控制
控制 BMR 传感器 ON、OFF 状态。
选中控制项目中的“传感器控制”后,选择“ON(O)”按钮、“OFF(F)”按钮、“ON/OFF(/)”按钮,或“F3”
键、“F4”键、“F5”键控制。
3)HMS
a) XY 轴移动
与 Head 控制的 XY 轴的移动相同。
b) 计测
测量高度。
·选中控制项目中的“计测”后,选择“执行(E)”按钮,或按下“F3”键控制。
·结束控制后,画面显示最新的计测结果。
第 2 部 功能详解编 第 9 章 手动控制
9-13
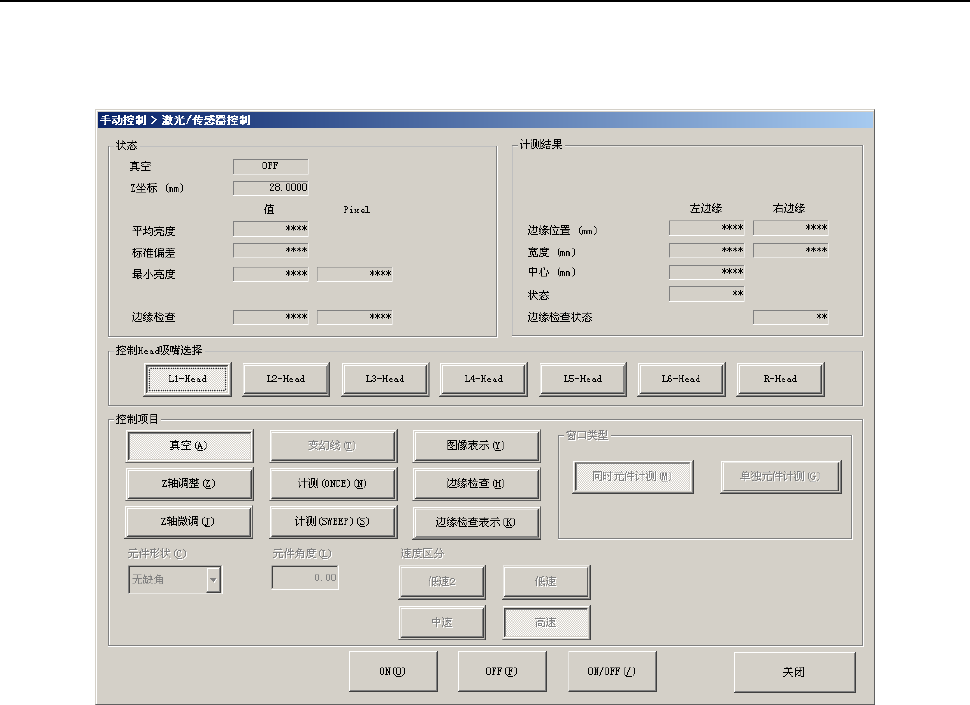
9-4-3 激光/传感器控制
从下拉菜单中选择“Head(D)”-“激光/传感器控制(L)”或选择命令按钮的“激光/传感器控制”,显示如下
的激光/传感器控制画面。
(1) 状态/计测结果
在“9-4-3-10 状态显示、计测结果”中作详细介绍。
(2) 控制 Head 吸嘴选择
点击单选按钮,选择控制对象 Head。
不受机器设置的“使用单元”设置的影响。
在 KE-3010,不显示[R-Head]按钮。
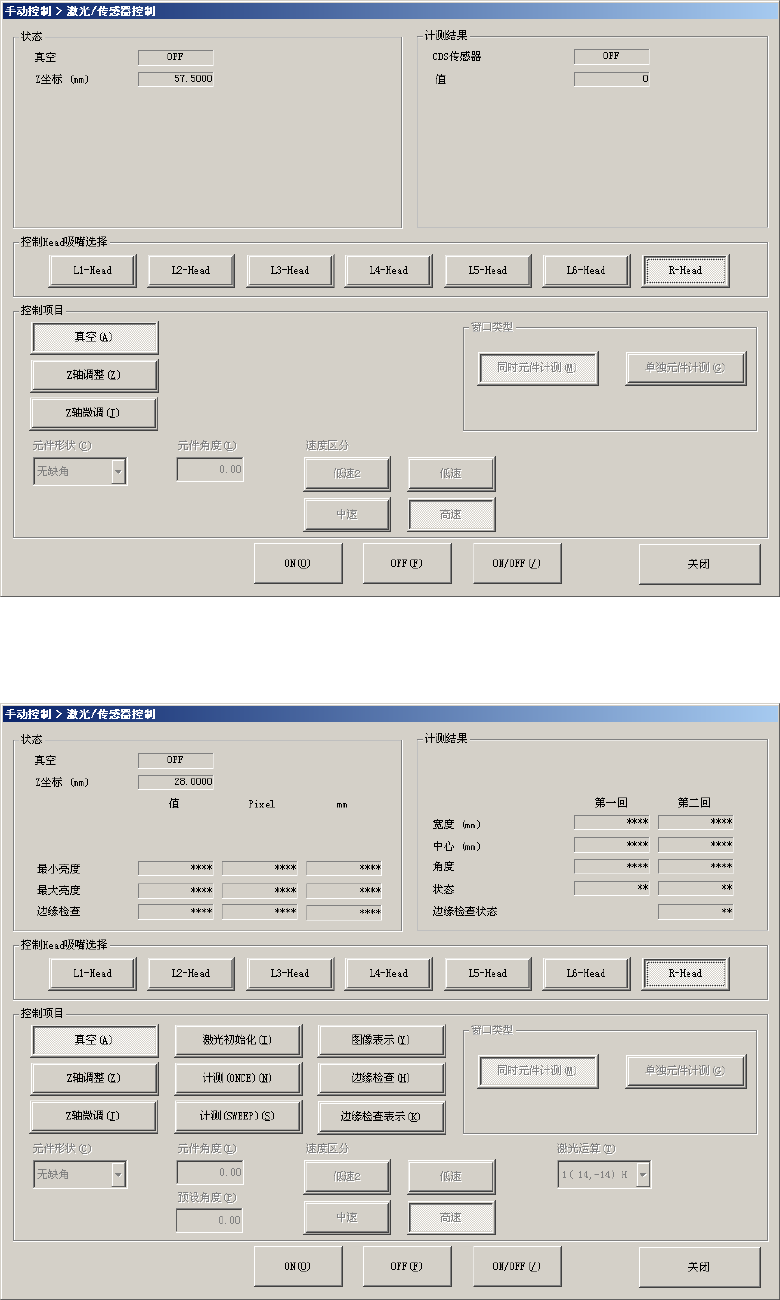
选择 R-Head 时,控制项目及状态、计测结果区域会有变化。
KE-3020V 及 KE-3020VR 上显示的内容不同。
第 2 部 功能详解编 第 9 章 手动控制
9-14
・
选择 R-Head 时的画面(KE-3020V)
・
选择 R-Head 时的画面(KE-3020VR)