KE-3010_20V_使用说明书.pdf - 第933页
第 2 部 功能详解编 第 9 章 手动控制 9-65 9-9-6-4 轴反馈位置的信息 按下 “ 轴反馈位置信息 ” 按钮后,会显示如下画面。 (1) 状态 显示轴的返回位置。 在 KE-3010 ,不显示 [ 右 Z1 轴 ][ 右 T1 轴 ] 。
第 2 部 功能详解编 第 9 章 手动控制
9-64
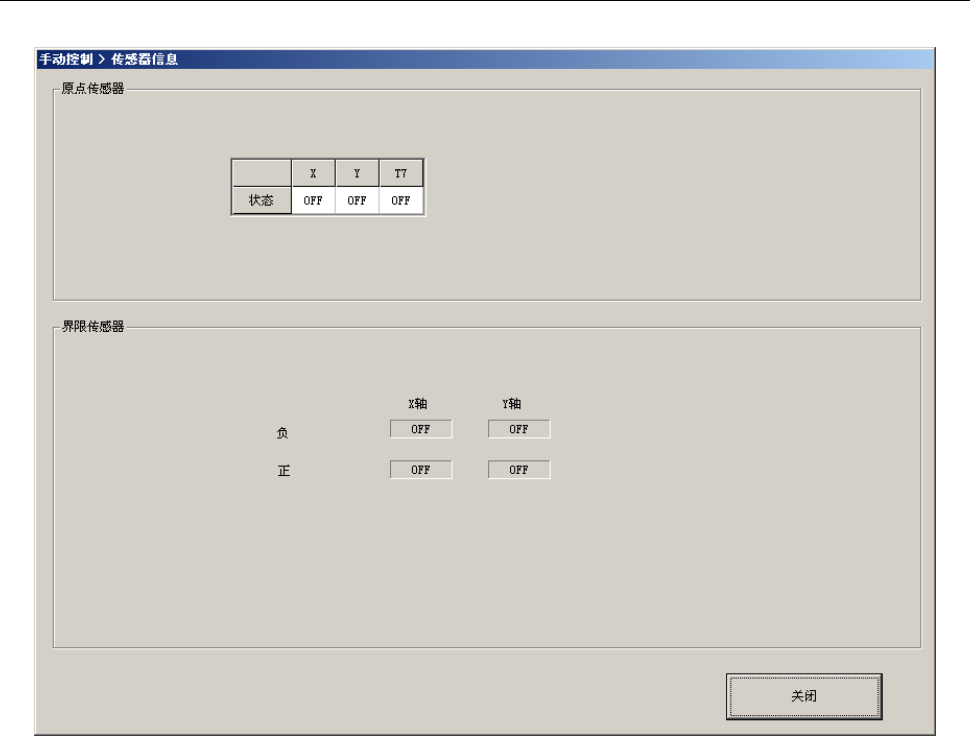
9-9-6-3 传感器信息:传感器信息
按下“传感器信息”按钮后,会显示如下画面。
(1) 状态
用 ON、OFF 显示原点传感器和界限传感器的状态。
此外,在 KE-3010 不显示 [T7]。
第 2 部 功能详解编 第 9 章 手动控制
9-65
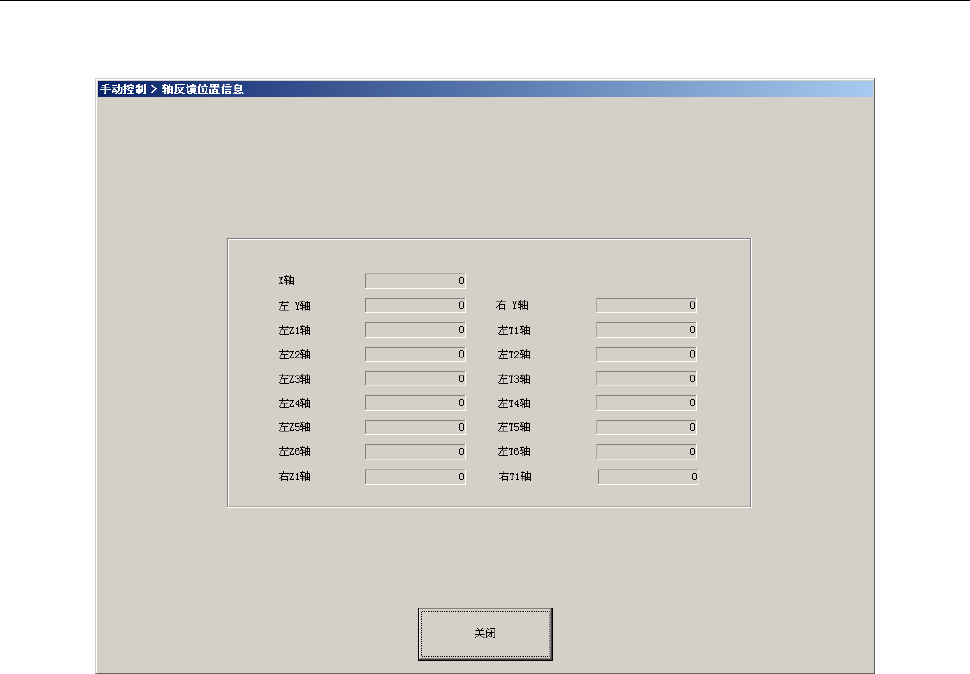
9-9-6-4 轴反馈位置的信息
按下“轴反馈位置信息”按钮后,会显示如下画面。
(1) 状态
显示轴的返回位置。
在 KE-3010,不显示[右 Z1 轴][右 T1 轴]。
第 2 部 功能详解编 第 9 章 手动控制
9-66
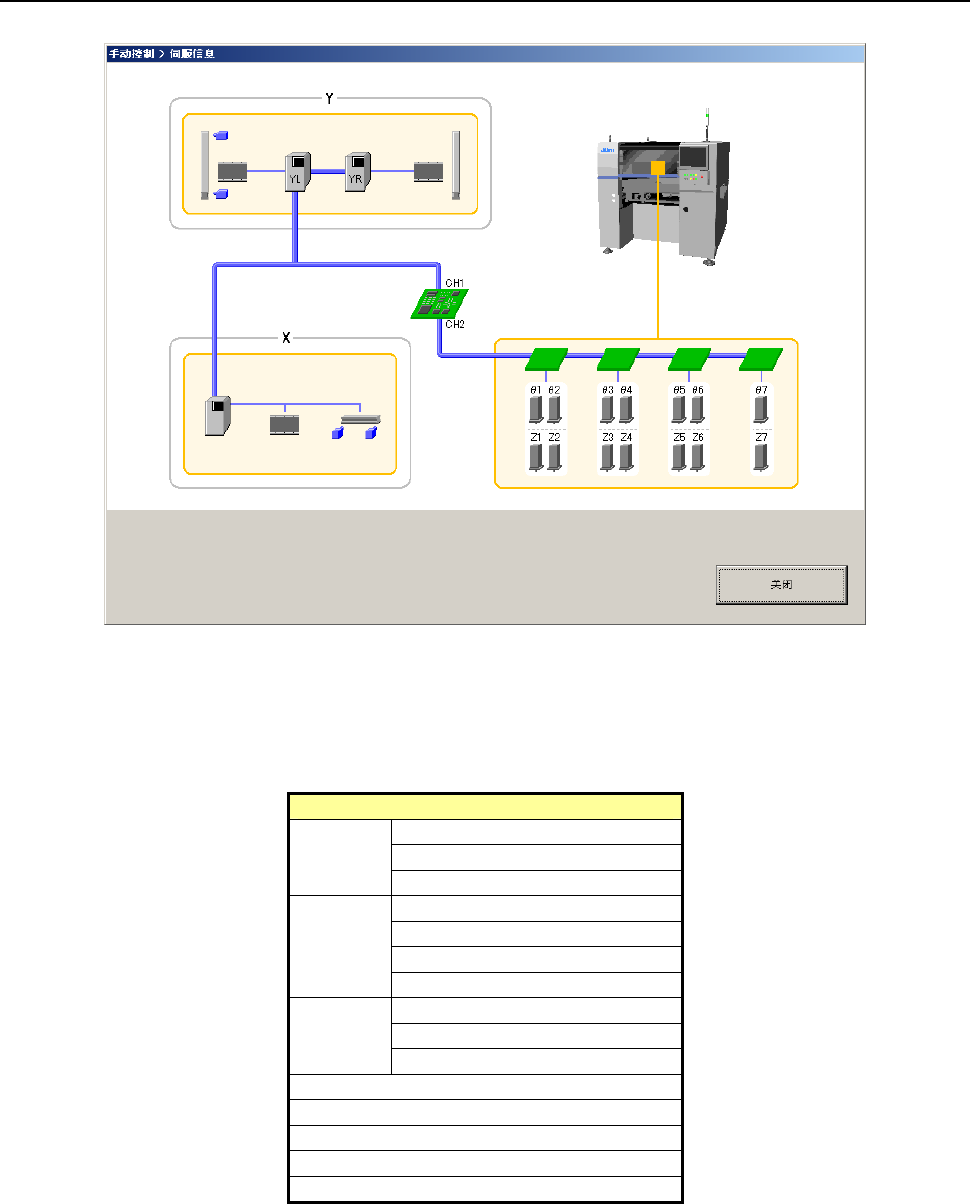
9-9-7 伺服信息
从下拉菜单中点击“其他(O)”-“伺服状态(S)”,或点击命令按钮中的“伺服信息”后,可显示伺服信息画面。
(1) 伺服状态
显示伺服现在的状态。
出现错误的单元显示为红色。
将光标移动到单元或各传感器的图标上,可显示工具信息提示。
单元
放大器
马达
Y 轴右
界限传感器 正/负
放大器
马达
界限传感器 负
Y 轴左
界限传感器 + +
放大器
马达
Y 轴左
界限传感器 正/负
θ1 ~ θ6
θ7(仅 KE-3020V/3020VR)
Z1 ~ Z6
Z7(仅 KE-3020V/3020VR)
位置板