MV-9_Chapter 5. Teaching.pdf - 第97页
错误 ! 使用“开始” 选项卡将 제목 2 应用于要在此处显示的文字。 错误 ! 使用“开始”选项卡将 제목 2 应用 于要在此处显示的 文字。 . 5-97 9) Component center search - This algorithm is to search and register center position of inspect i on ta rget and to conduct the following 2…
MV-9 User Manual
5-96
If detected Outer Radius and Inner Radius is within range input value range based
on current value, judge as good.
If it is below all of X distance, Y distance, Distance value entered in the center,
judge as good.
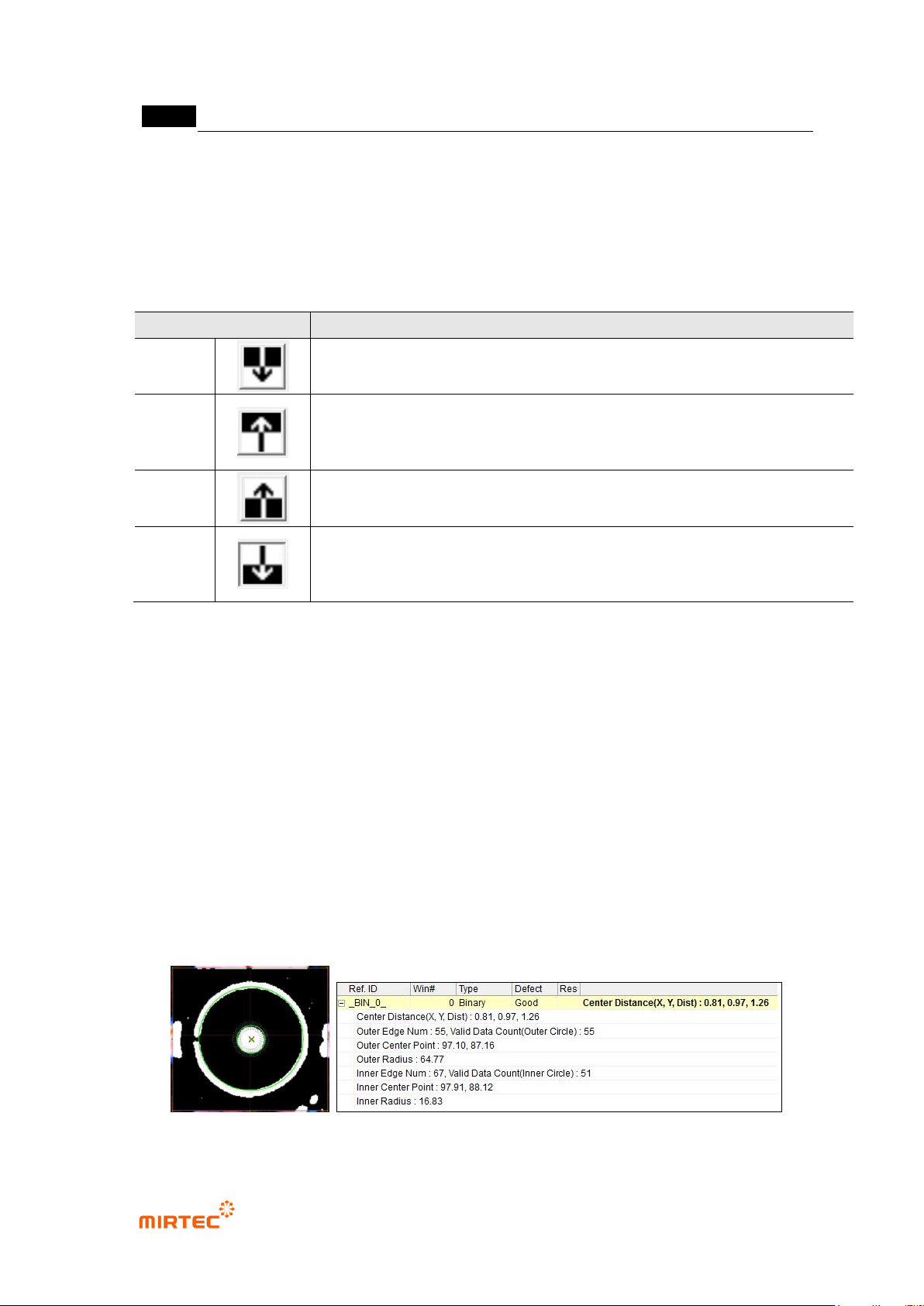
[Table 5-7 Binary inspection – eccentricity inspection detection type]
detection type
Description
1
Search boundary line from up to down, and detect Positive (Change from
black to white) boundary line.
2
Click inspection type No 1 one more time to convert detection type.
Search boundary line from down to up, and detect Negative (Change from
black to white) boundary line.
3
Search boundary line from down to up, and detect Positive (Change from
black to white) boundary line.
4
Click inspection type No 3 one more time to convert detection type.
Search boundary line from up to down, and detect Negative (Change from
black to white) boundary line.
③ Inspection result in status screen
Center Distance (X, Y, Dist): calculated distance between center of inner circle and outer
circle.
Outer / Inner Edge Num: the number of boundary line position detected in segmented area
to detect circle.
Valid Data Count (Outer / Inner Circle): the number of boundary line position that is
actually used to search adjacent circle.
Outer / Inner Center Point: center position of near circle
Outer / Inner Radius: radius of near circle
[Figure 5-102 eccentricity inspection result]

错误!使用“开始”选项卡将 제목 2 应用于要在此处显示的文字。错误!使用“开始”选项卡将 제목 2 应用
于要在此处显示的文字。 .
5-97
9) Component center search
- This algorithm is to search and register center position of inspection target and to conduct
the following 2 inspections.
inspection for component Shift
Measurement of relative distance for reference point (virtual line offset)
- For measurement of relative distance, refer to BLU inspection. Here, we describe only
functions of shift inspection.
- Detection types are circle center search, rectangle center search and center of gravity
search.
C-Chip / R-Chip: used for System Calibration.
LED Circle / Color LED: used for BLU inspection.
① Teaching method
(a) Draw inspection window in inspection area.
(b) Select preview in operation window.
(c) Select whether to use SubPixel and Cognex.
(d) Set binarization value checking preview image.
(e) If image reverse is necessary, check at this.
(f) To detect edge by using color information, check at color map and click setting button,
and adjust color, saturation and luminance in color map.
(g) Select detection type.
(h) Set circle search range, Polarity (+), Circle Radius, Use hole inspection, Use CenterPoint,
virtual line offset according to detection type.
(i) Set „Don‟t care region‟.
(j) Conduct trial inspection, check whether central point is well found, and click reference
point registration button.
(k) Set tolerance range.
MV-9 User Manual
5-98
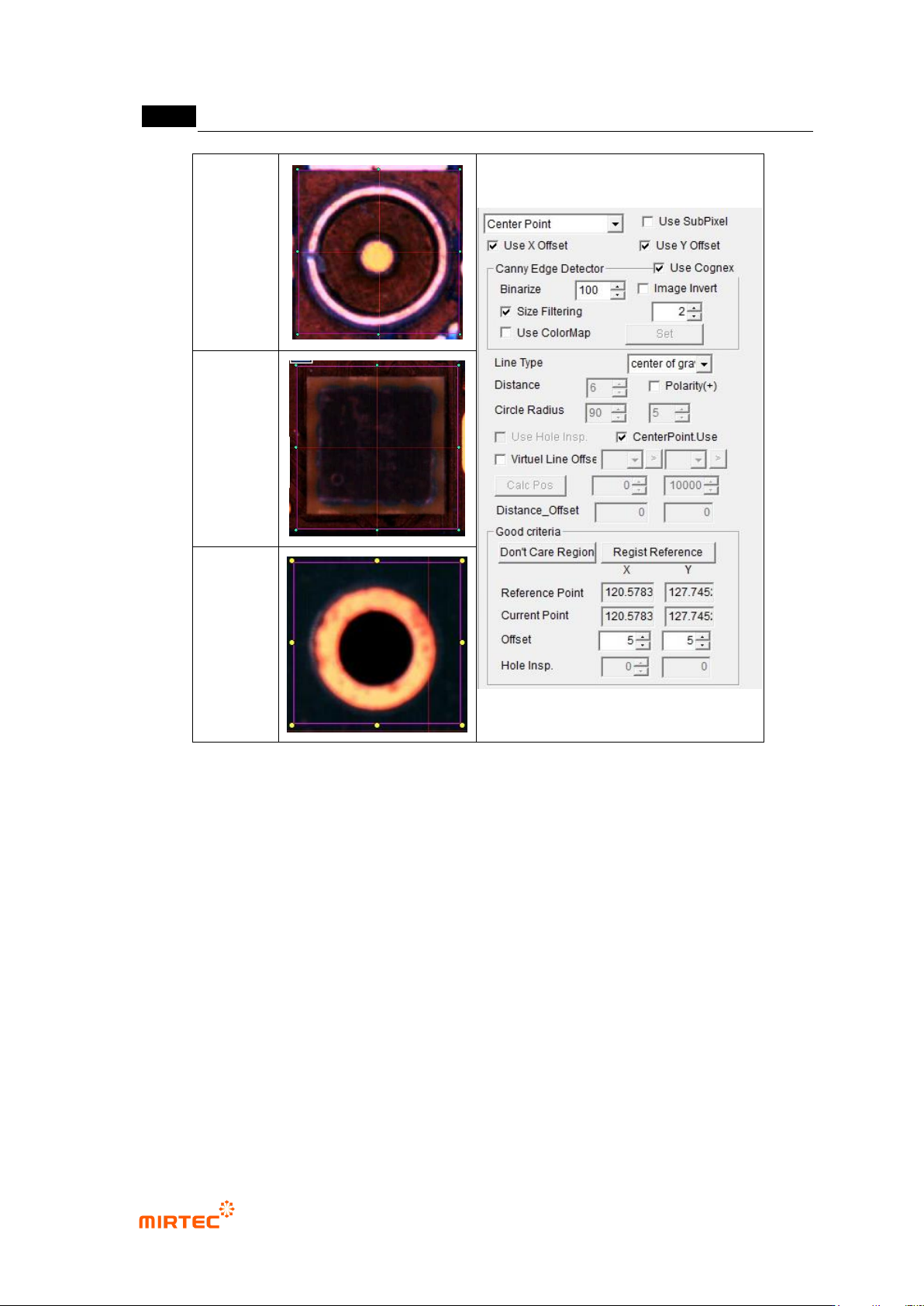
Circle
center
search
Rectangle
center
search
Center of
gravity
search
[Figure 5-103 component center search inspection window teaching example]
① Parameter description
Use SubPixel
- Check at this item to detect center using gray image.
Canny edge detector
- Use Cognex: check at this item to detect edge using Cognex tool.
- Binarization
Adjust binarization value to clearly display edge.
If the value is set too low or high, edge will not clearly displayed. Therefore, check
edge extraction status in preview image by adjusting binarization value.
- Image reverse