00196710-02-BA-SX4DX4-JA.pdf - 第132页
3 テクニカルデータおよびアセンブ リ ユーザーマ ニュアル SIPLACE SX4/DX4 3.7 PCB コンベヤシステ ム ソフトウエアバージョン SC.704.xx 以降 2011 年 2 月日本語版 132 3.7 PCB コンベヤシステム 3.7.1 PCB シングルコンベヤ (DX4 のみ ) 3.7.1.1 構造 3 図 3 .7 - 1 PCB シングルコンベヤの 構造 (1) インコンベヤ (2) 実装コンベヤ (3…
ユーザーマニュアル SIPLACE SX4/DX4 3 テクニカルデータおよびアセンブリ
ソフトウエアバージョン SC.704.xx 以降 2011 年 2 月日本語版 3.6 X-Y 軸システム
131
3.6.3 Y 軸の構造
3
図 3.6 - 3 Y 軸の構造 (SX4 の例 )
Y 軸は基本的に次の主なモジュールから成り立っています。
(1) 固定ベアリングおよびルースベアリングが取り付けられた X 軸上の Y 軸リニアモータ ( 第
一部分 )
(2) 永久磁石 (Y 軸リニアモータの第二部分 )
(3) リニア距離測定システム
(4) ガイドシステム
(1)
(4)
(2)
(3)
(4)
3 テクニカルデータおよびアセンブリ ユーザーマニュアル SIPLACE SX4/DX4
3.7 PCB コンベヤシステム ソフトウエアバージョン SC.704.xx 以降 2011 年 2 月日本語版
132
3.7 PCB コンベヤシステム
3.7.1 PCB シングルコンベヤ (DX4 のみ )
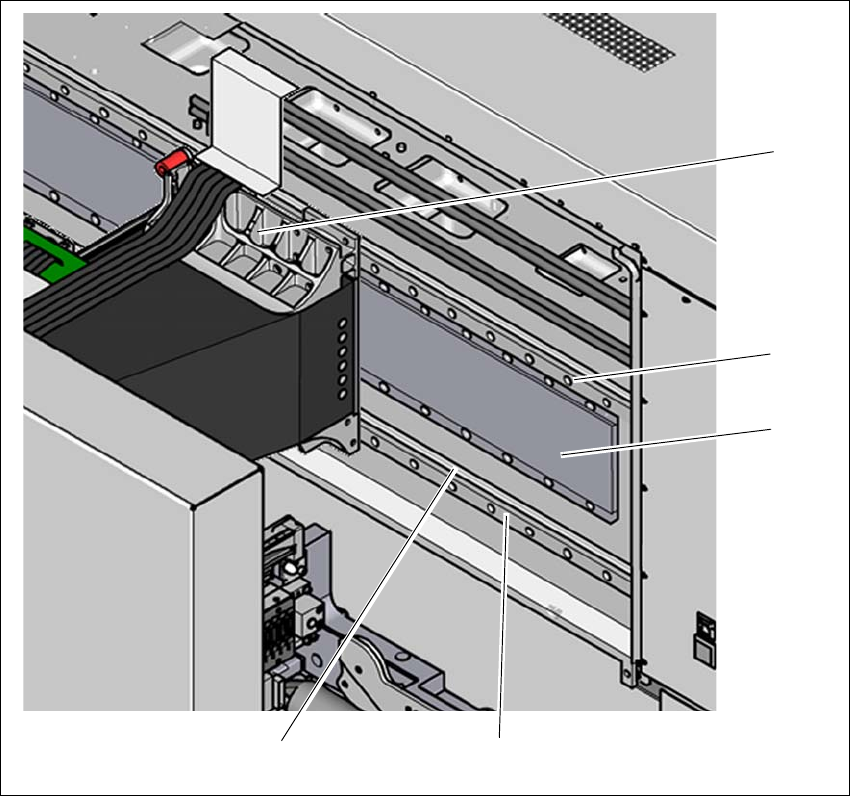
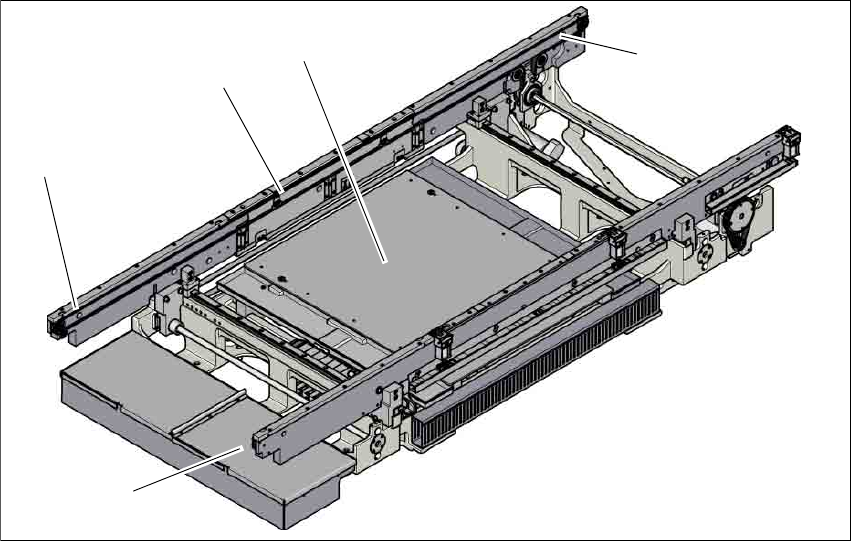
3.7.1.1 構造
3
図 3.7 - 1 PCB シングルコンベヤの構造
(1) インコンベヤ
(2) 実装コンベヤ
(3) バックアップテーブル
(4) アウトコンベヤ
(5) コンベヤコントロール ( カバーの下 )
(4)
(1)
(2)
(3)
(5)
ユーザーマニュアル SIPLACE SX4/DX4 3 テクニカルデータおよびアセンブリ
ソフトウエアバージョン SC.704.xx 以降 2011 年 2 月日本語版 3.7 PCB コンベヤシステム
133
3.7.1.2 説明
シングルコンベヤは、インコンベヤ、実装コンベヤおよびアウトコンベヤの 3 つの部分からな
るコンベヤとして設計されています。インコンベヤエリアおよびアウトコンベヤエリアは、短
めの待ち時間が必要な場合、PCB の緩衝領域として働きます。
コンベヤベルトは、DC モータによって駆動されます。超音波センサによって基板の搬送がモニ
タされ、管理されています。基板は、実装エリアに到達し、超音波センサを通過すると、停止
します。ストッパは、ここで基板の位置を決めます。基板が、その目標位置に到達するとすぐ
に、コンベヤベルトが動作を停止し、基板は下からクランプされます。
そのため、PCB の上面と実装ヘッド間の距離は、各 PCB について変化することがありませんし、
PCB の厚さによって異なることもありません。また、そのため実装速度も、PCB の厚さに依存し
ません。さらに、PCB フィデューシャルによるセンタリングも最短化することができます。PCB
表面と PCB カメラの距離が一定のままなので、PCB カメラは同じシャープさを保ったまま、必
ず PCB に焦点が合っています。PCB フィデューシャルの輪郭は、PCB カメラの CCD チップ上に最
適にマッピングされます。
回路基板コンベヤの幅は、内蔵コントロール回路によって、設定され、モニタされています。
これは、プログラムを呼び出すことで選択することができます。電子制御によって、任意の幅
に到達するまで、ステッピングモータが動作します。このため、幅調整を、他のマシン構成部
分とは独立しておこなうことができます。
900、930 または 950 mm の搬送高さのラインにマシンを統合することができるように、コンベ
ヤ高さをマシン上で選択することができます。標準高さは、930 mm です。
PCB コンベヤは、SMEMA インタフェースまたはオプションの Siemens インタフェースを経由し
て、個々のマシンと通信します。
デュアルコンベヤまたはシングルコンベヤでは、コンベヤ固定側を左または右のどちらかに置
くことができます。ステーションソフトウエアで、コンベヤ固定側を右から左、またはその逆
に変更することは簡単に実行できます。