e-Series_Service_Manual_CN.pdf - 第117页
6. 故障排除 维修手册 1 1 1 维修手册 版权 © 2009 – 20 2 0 优傲机器人公司版 权所有。保留 所有权利。 C193A8 界面 2 安 全 控 制 板 检 测 到 示 教 器 的 安 全处理器 2 出现错 误 a) 查看之前的错误 。 b) 执行完整的重启 序列 C193A9 Euromap 1 a) 查看之前的错误 。 b) 执行完整的重启 序列 C193A10 Euromap 2 a) 查看之前的错误 。 b)…
6. 故障排除
维修手册
110
维修手册
版权
© 2009–2020 优傲机器人公司版权所有。保留所有权利。
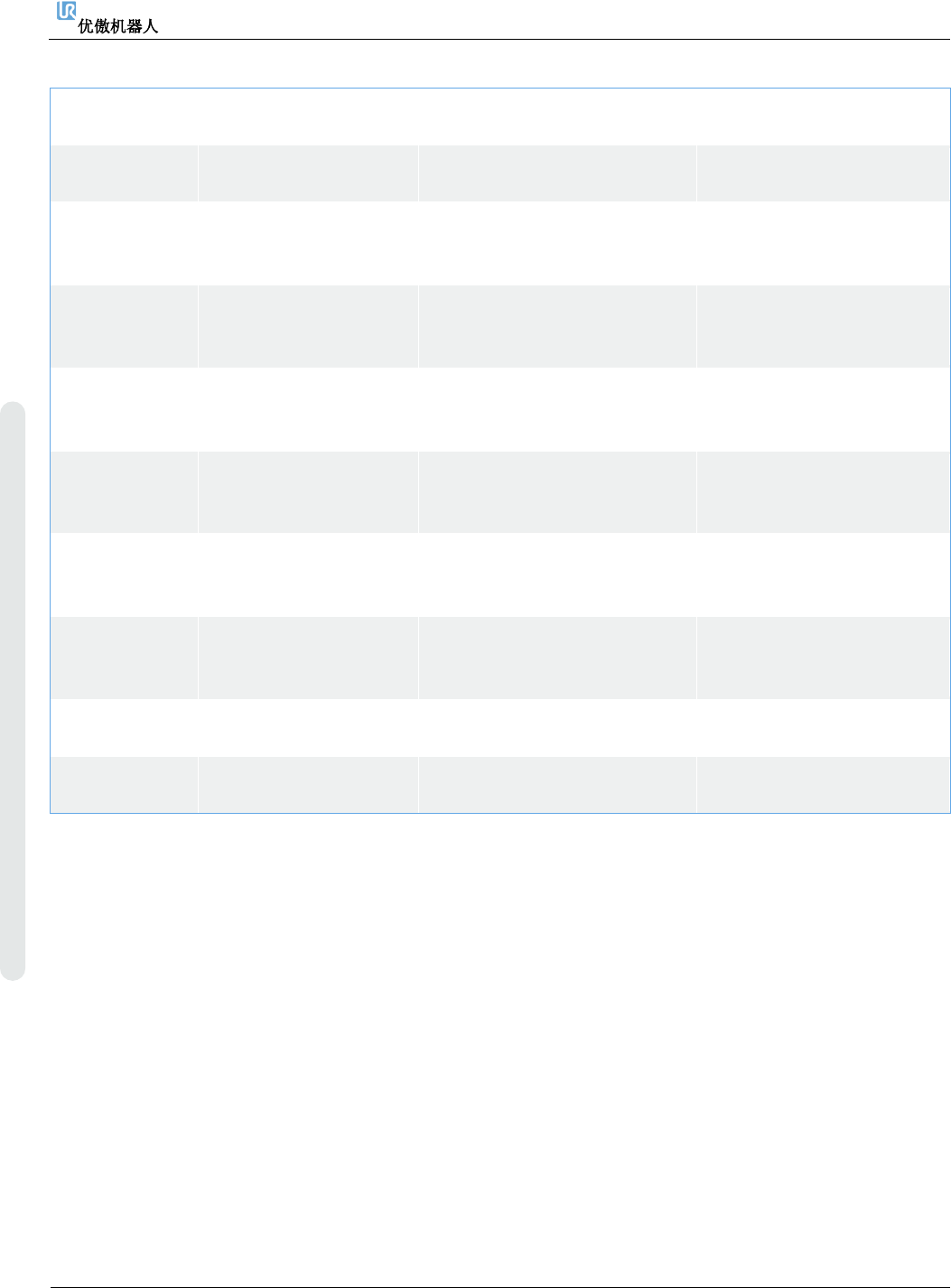
C192A40
操作模式开关输入不一
致
C193A
其中一个节点处于故障
模式
C193A0
底座关节
a) 查看之前的错误。
b) 更新关节上的固件。
c) 执行完整的重启序列
C193A1
肩部关节
a) 查看之前的错误。
b) 更新关节上的固件。
c) 执行完整的重启序列
C193A2
肘部关节
a) 查看之前的错误。
b) 更新关节上的固件。
c) 执行完整的重启序列
C193A3
手腕1关节
a) 查看之前的错误。
b) 更新关节上的固件。
c) 执行完整的重启序列
C193A4
手腕2关节
a) 查看之前的错误。
b) 更新关节上的固件。
c) 执行完整的重启序列
C193A5
手腕3关节
a) 查看之前的错误。
b) 更新关节上的固件。
c) 执行完整的重启序列
C193A6
工具
a) 查看之前的错误。
b) 执行完整的重启序列
C193A7
界面1 安全控制板检测到示教器的安
全处理器1出现错误
a) 查看之前的错误。
b) 执行完整的重启序列
6. 故障排除
维修手册
111
维修手册
版权
© 2009–2020 优傲机器人公司版权所有。保留所有权利。
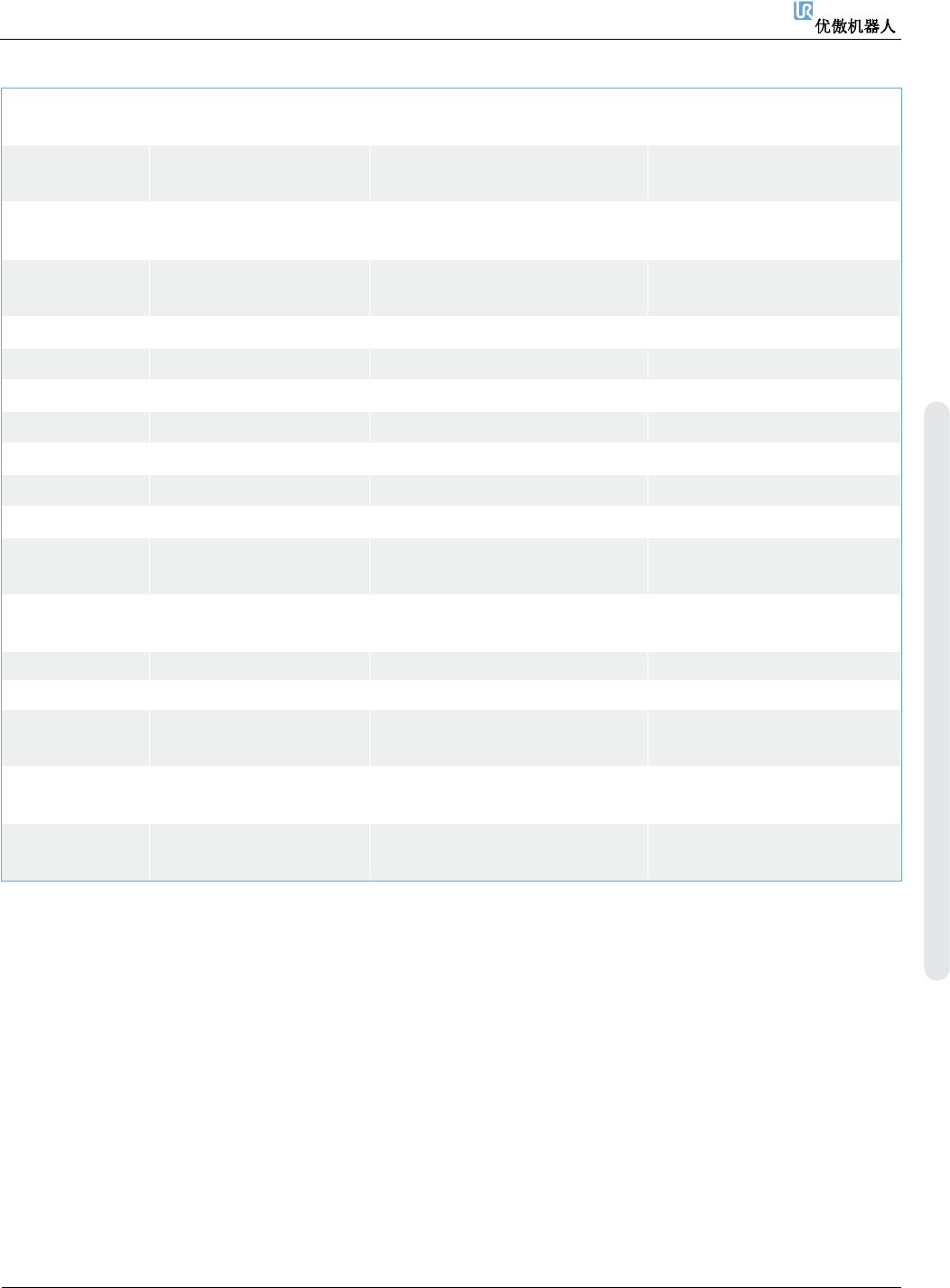
C193A8
界面2 安全控制板检测到示教器的安
全处理器2出现错误
a) 查看之前的错误。
b) 执行完整的重启序列
C193A9 Euromap 1
a) 查看之前的错误。
b) 执行完整的重启序列
C193A10 Euromap 2
a) 查看之前的错误。
b) 执行完整的重启序列
C194A
其中一个节点未启动或
不存在
C194A0
底座关节
C194A1
肩部关节
C194A2
肘部关节
C194A3
手腕1关节
C194A4
手腕2关节
C194A5
手腕3关节
C194A6
工具
C194A7
界面1 安全控制板检测到示教器的安
全处理器1出现错误
C194A8
界面2 安全控制板检测到示教器的安
全处理器2出现错误
C19
4A9
E
uromap 1
C194A10
Euromap 2
C194A128
请求释放制动器时,底座
未准备就绪
请求释放制动器时,必须至少处
于待机模式
检查通信电缆是否松动
C194A129
请求释放制动器时,肩部
未准备就绪
请求释放制动器时,必须至少处
于待机模式
检查通信电缆是否松动
C194A130
请求释放制动器时,肘部
未准备就绪
请求释放制动器时,必须至少处
于待机模式
检查通信电缆是否松动
6. 故障排除
维修手册
112
维修手册
版权
© 2009–2020 优傲机器人公司版权所有。保留所有权利。
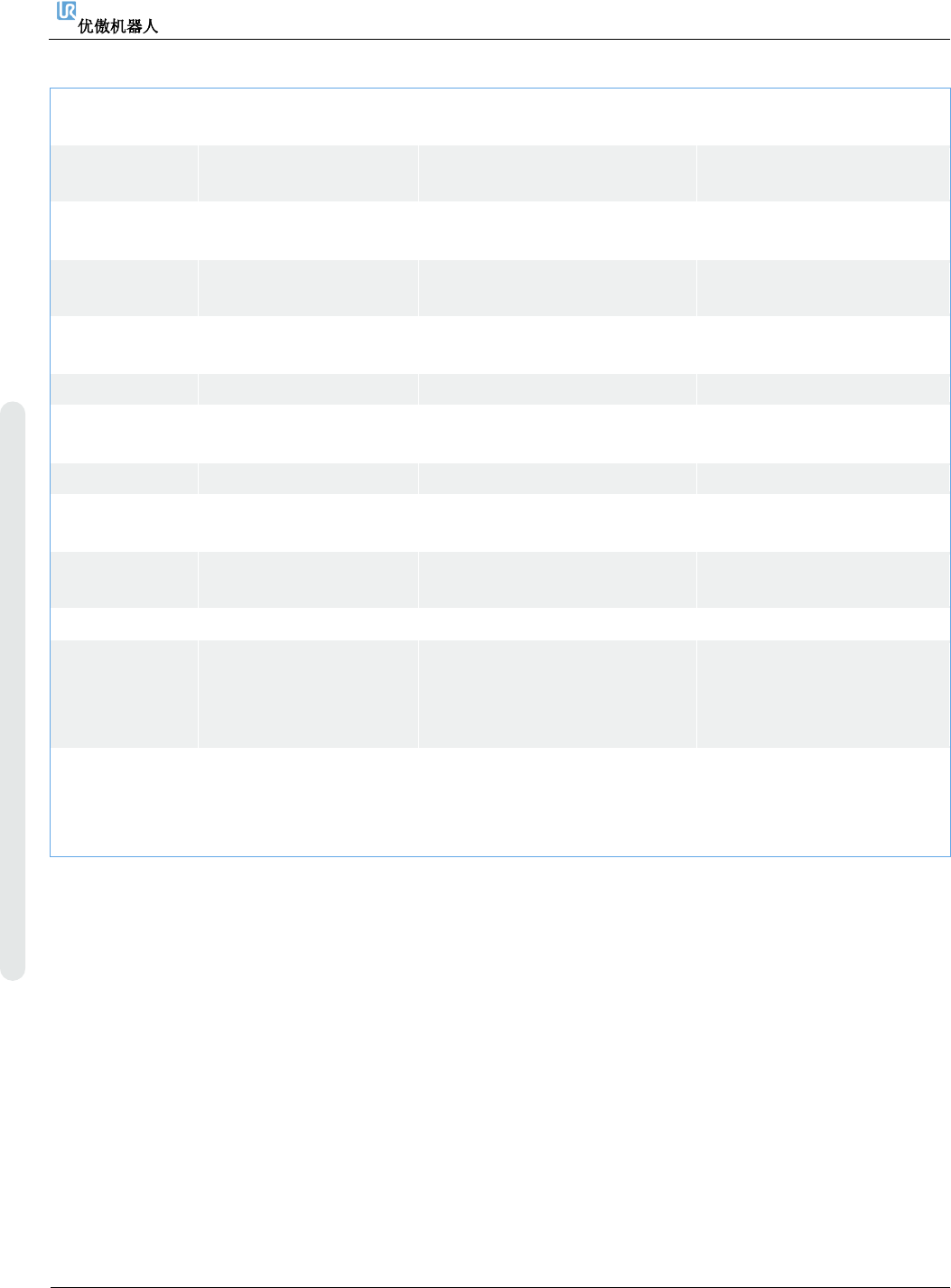
C194A131
请求释放制动器时,手腕
1未准备就绪
请求释放制动器时,必须至少处
于待机模式
检查通信电缆是否松动
C194A132
请求释放制动器时,手腕
2未准备就绪
请求释放制动器时,必须至少处
于待机模式
检查通信电缆是否松动
C194A133
请求释放制动器时,手腕
3未准备就绪
请求释放制动器时,必须至少处
于待机模式
检查通信电缆是否松动
C194A134
请求释放制动器时,工具
未准备就绪
请求释放制动器时,必须至少处
于待机模式
检查通信电缆是否松动
C195A
输送机速度过高 输送机速度高于机器人的运行
速度范围
确保输送机追踪设置正确
C195A1
关节的速度安全限值
C195A2
工具中心点的速度安全
限值
C195A3
动力安全限值
C196A
MoveP速度过高 相对于交融半径的速度过快 在用户程序中降低速度或增
加交融半径
C197A
交融重叠
警告
C200A
安全控制板硬件出错
C200A1
硬件ID错误 安全控制板:uP-A检测到错误
:安全控制板错误
a) 执行完整的重启序列。
b) 如果这种情况连续发生
两次以上,请更换安全
安全控制板
C200A2
MCU类型错误 安全控制板:uP-A 检测到错误
a) 执行完整的重启序列。
b) 如果这种情况连续发生
两次以上,请更换安全
安全控制板