e-Series_Service_Manual_CN.pdf - 第44页
4. 维修和更换零件 维修手册 38 维修手册 版权 © 2009 – 20 2 0 优傲机器人公司版 权所有。保留 所有权利。 手腕 2 零位对齐类 似底座关节,其中工具法兰 与手 腕 1 输出法兰平行 。 手腕 3 零位 对齐,以 便工具连接器指向上方。在 工 具孔中安装两个 螺栓 ,并用水准仪 对齐关节。 6. 在 “Joint Zeroing ( 关节归零) ” 窗口中选 择要归零的关节。选中后,该方 框将从灰色变为蓝色。 按下…
4. 维修和更换零件
维修手册
37
维修手册
版权
© 2009–2020 优傲机器人公司版权所有。保留所有权利。
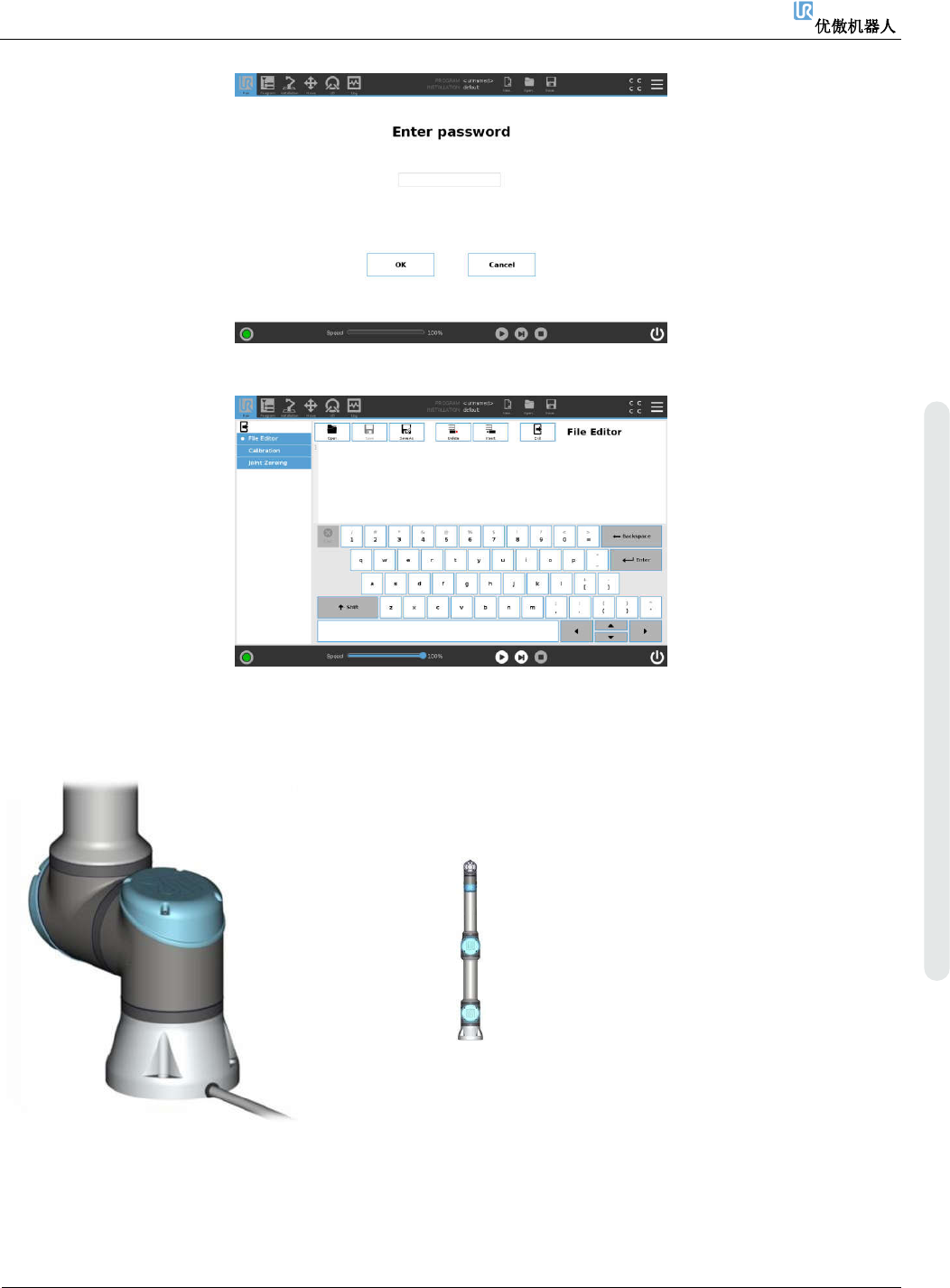
4. 在左侧菜单中选择“Joint Zeroing(关节归零)”。
5. 使用屏幕右侧“Joint Position(关节位置)”窗口中的箭头来移动每个关节以对齐,如下图所示。
速度滑块可用于降低移动速度。
底座 肩部、肘部、手腕 1
底座零位对齐,以便底关节与机器人底座后面的电
缆偏移 180 度。
肩部、肘部和手腕 1 零输出法兰垂直对齐(假设底
座呈水平)。确保机器人底座处于水平状态,用水准
仪对齐关节。
手腕 2 手腕 3

4. 维修和更换零件
维修手册
38
维修手册
版权
© 2009–2020 优傲机器人公司版权所有。保留所有权利。
手腕 2 零位对齐类似底座关节,其中工具法兰与手
腕 1 输出法兰平行。
手腕 3 零位对齐,以便工具连接器指向上方。在工
具孔中安装两个螺栓,并用水准仪对齐关节。
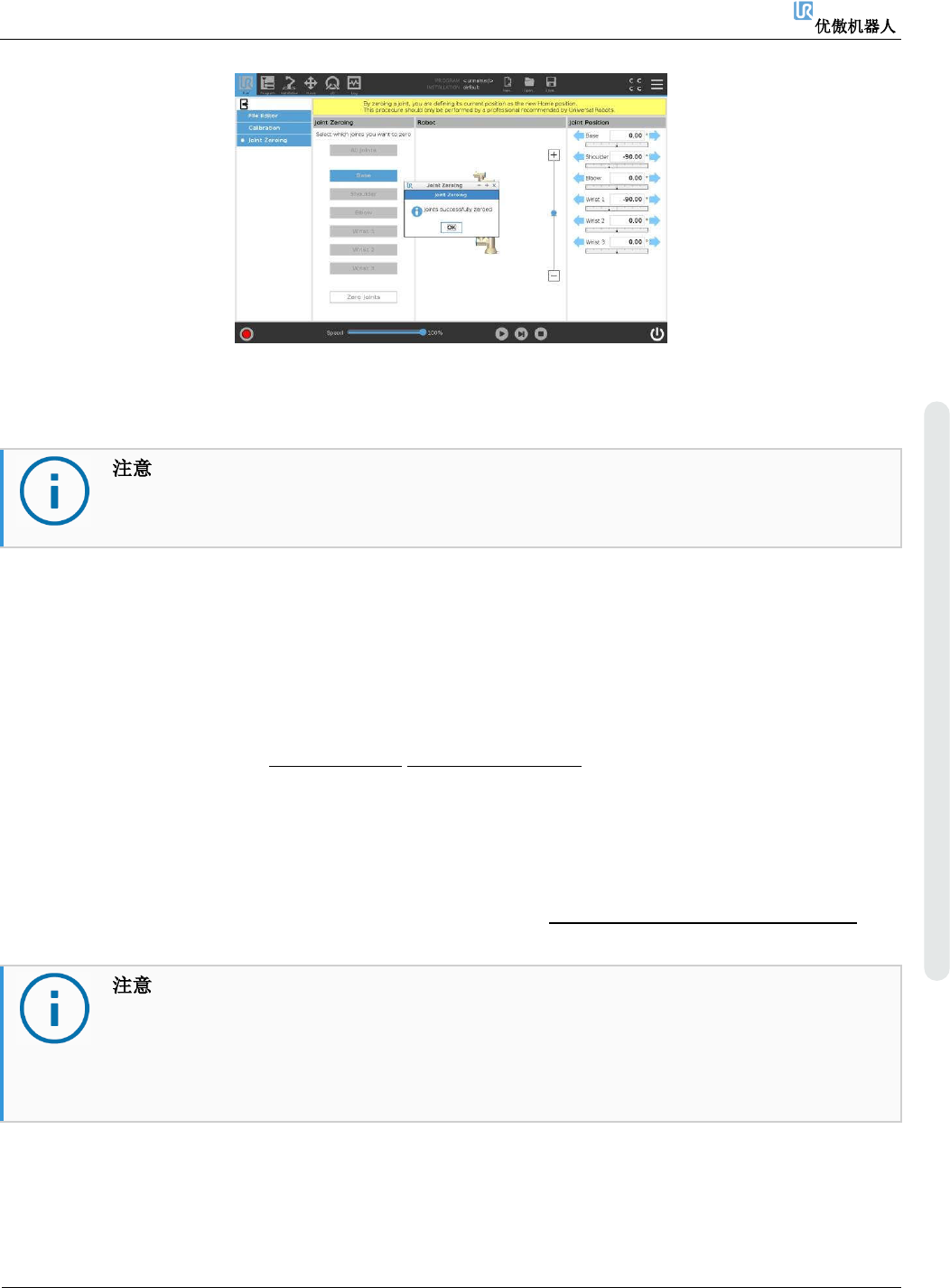
6. 在“Joint Zeroing(关节归零)”窗口中选择要归零的关节。选中后,该方框将从灰色变为蓝色。
按下“Zero Joints(关节零位)”
7. 确认您想将关节归零。确认后机器人会断电。
8. 将显示一个弹出窗口,确认关节现已归零。按下“确认”关闭弹出窗口并将其恢复正常。
4. 维修和更换零件
维修手册
39
维修手册
版权
© 2009–2020 优傲机器人公司版权所有。保留所有权利。
4.2.12. 双机械臂校准
双机械臂校准会在整个工作空间对机器人进行校准。所有新机器人在总装前均经过双机械臂校准。
如果更换已校准机器人的关节,该校准则不再有效。
更换关节后进行双机械臂校准,可使机器人在生产线上工作,且无需修改机器人程序中的路点。
若要进行双机械臂校准,您需要:
⚫
2 个机器人(相同尺寸和同一代)
⚫
全套双机械臂校准工具(零件号:185500)
您可以从优傲机器人支持网站 www.universal- robots.com/support/上下载校准手册
4.2.13. 关键路点程序修正
程序从一个未校准的机器人移到另一个机器人时,关键路点程序修正有助于调整程序路点。这项技术也
可以用来使程序在更换关节后工作。
有关如何使用该功能的详细说明,请参见优傲机器人支持网站 www.universal-robots.com/support/上的
校准手册。
关键路点程序修正目前不支持以下各项:
‒ 除固定路点外的其他类型的路点。
‒ 选择“Use Joint Angles(使用关节角度)”来移动节点。
上述不受支持的程序节点可能需要在
“
关键路点程序修正
”
过程完成后手动修正。