e-Series_Service_Manual_CN.pdf - 第168页
6. 故障排除 维修手册 162 维修手册 版权 © 2009 – 20 2 0 优傲机器人公司版 权所有。保留 所有权利。 ⚫ 外壳材料: P A66 ⚫ 符合: SAE J2077 、 ISO 8820-3 ⚫ UL 248 专用保险丝 6.5. 完 整的重 启序列 若要完全重启机 器人系统,请执行以下步骤: 6.6. 保 护性停 止 另请阅读支持网 站 www .universal-robots.co m /support 上的第…
6. 故障排除
维修手册
161
维修手册
版权
© 2009–2020 优傲机器人公司版权所有。保留所有权利。
⚫
端子:镀银锌合金
6. 故障排除
维修手册
162
维修手册
版权
© 2009–2020 优傲机器人公司版权所有。保留所有权利。
⚫
外壳材料:PA66
⚫
符合:SAE J2077、ISO 8820-3
⚫
UL 248专用保险丝
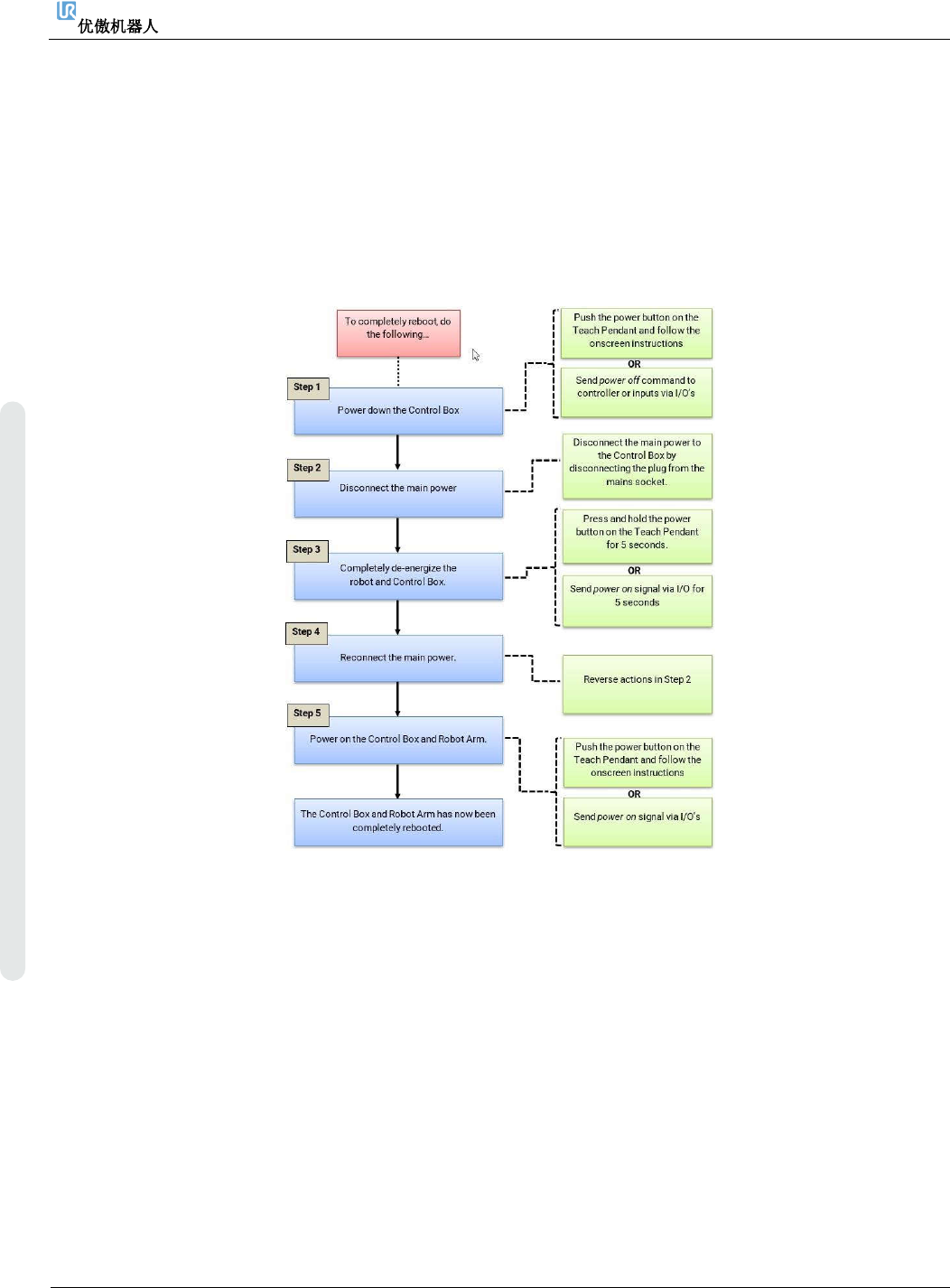
6.5. 完整的重启序列
若要完全重启机器人系统,请执行以下步骤:
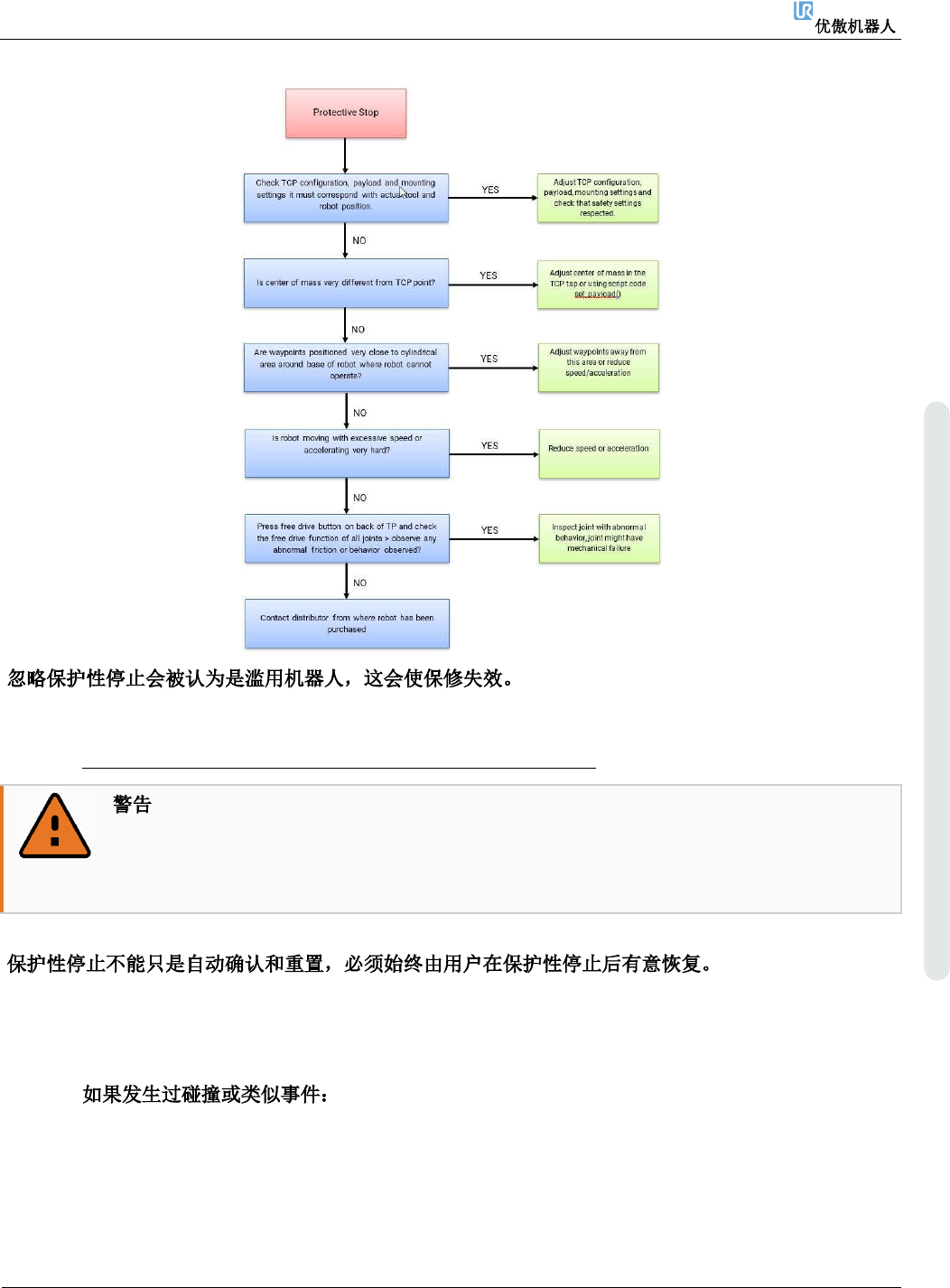
6.6. 保护性停止
另请阅读支持网站www.universal-robots.com/support上的第18939条
6. 故障排除
维修手册
163
维修手册
版权
© 2009–2020 优傲机器人公司版权所有。保留所有权利。
在以下两种情况下,这些故障可能会隐藏起来:
1. 工作人员只是简单地重置故障,而不考虑引起故障的原因。
忽略保护性停止会掩盖故障检测!
要小心注意保护性停止。
了解它们为什么会改进您的程序并保留故障检测!
一般来说,保护性停止是为了通知用户机器人因外部事件(如撞到障碍物或类似事件)而停止。在机器
人被逼近极限的情况下,机器人会产生保护性停止,以表明它们无法按照所需的轨迹操作。保护性停止
后,必须完成以下工作才能恢复运行:
i.
移除障碍物并确保操作人员离开后才能再恢复操作。请参见维修手册第2节(参见下面的链接)。