e-Series_Service_Manual_CN.pdf - 第71页
5. 软件 维修手册 65 维修手册 版权 © 2009 – 20 2 0 优傲机器人公司版 权所有。保留 所有权利。 5.4. 数 据备份 在复制 / 移动文 件和 文件 夹时,操作错误可能会 导致文件系统损坏 。 如果对此 程序不满意, 请联系 IT 专业人员 寻求帮助 。 本节说明在机器 人备份期间移动必要文件的过程 。 5.4.1. 硬件要求 需要以下硬件: ⚫ SD 卡(优傲机器人 4 G B 工业级 SD 卡) ⚫ 标准的 …
5. 软件
维修手册
64
维修手册
版权
© 2009–2020 优傲机器人公司版权所有。保留所有权利。
请务必在更新软件之前备份程序和安装文件。
5.3. 使用Magic File
为便于备份,优傲机器人提供 Magic File 功能,以自动将控制箱中的数据复制到 U 盘中。Magic File 备
份适用于所有软件版本。
请务必在更新软件之前备份程序和安装文件。
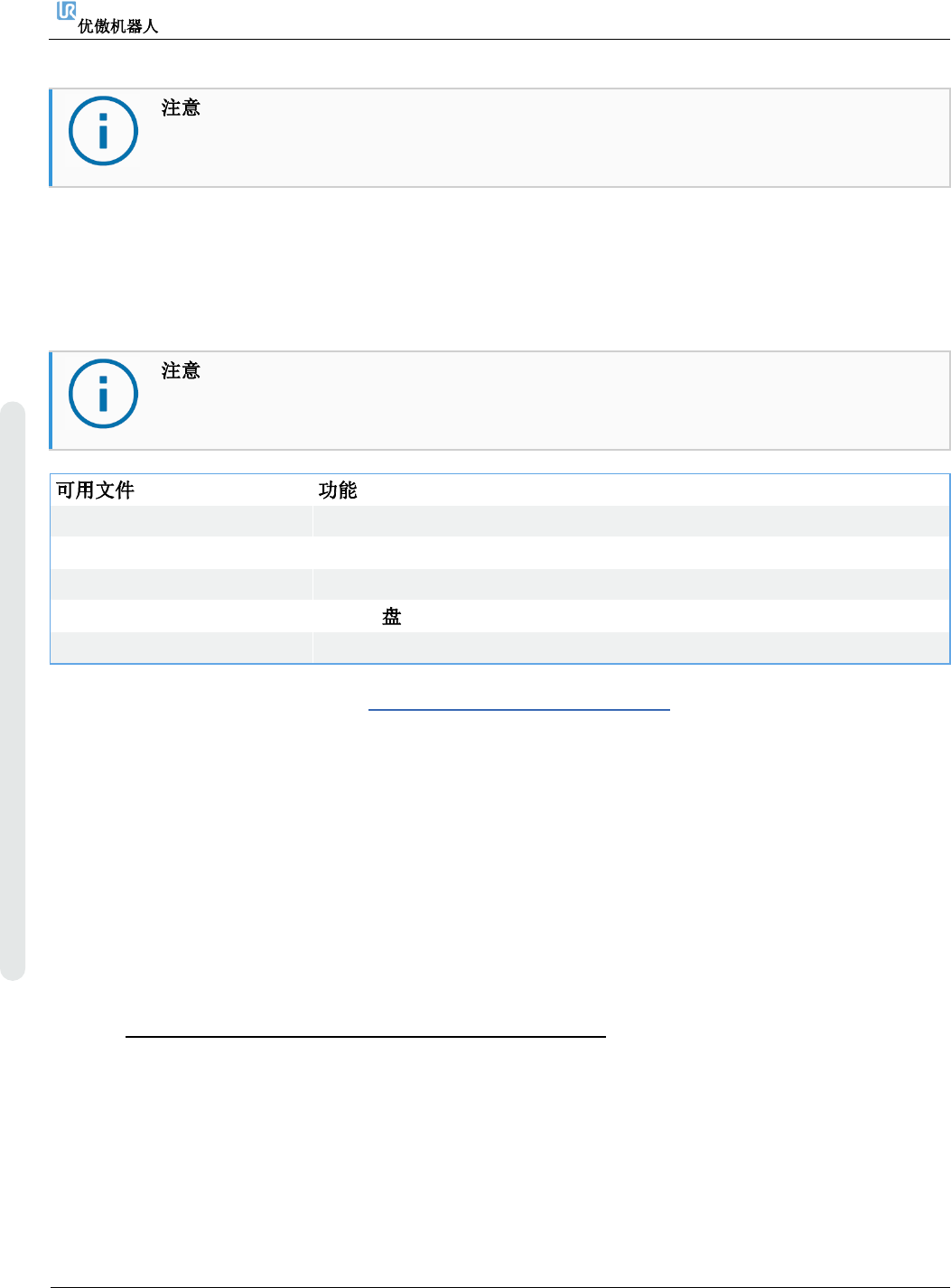
URmagic 日志文件 将整个日志历史文件复制到 U 盘上
URmagic 备份程序 将所有程序和安装文件复制到 U 盘上
URmagic 配置文件 将所有配置文件复制到 U 盘上
URmagic 上传程序 复制 U 中的所有程序和安装文件
URmagic 屏幕截图 插入 U 盘时,生成 GUI 的屏幕截图
您可以在以下网站下载 Magic File:www.universal-robots.com/support
5.3.1. 使用Magic File
1. 下载 Magic File 并将其保存在 U 盘的根文件夹中。如果 U 盘上有多个 Magic File,它们会依次
运行。每个文件都会出现警告。在完成最后一个文件之后,方可拔出 U 盘。将创建多个文件夹,
并用序列号加顺序号命名(例如,201855xxxx_0、201855xxxx_1)。
2. 将 U 盘插入示教器右侧的 USB 接口中。
3. 在屏幕上将出现一个红色的!USB!标志。请勿移除 U 盘。
4. 等待屏幕上出现绿色的<-USB 标志。如果 U 盘上有多个 Magic File,请转到第 3 步。注意:下
载大文件(如历史日志)时可能需要 2 分钟。
5. 在完成最后一个 Magic File 之后,方可安全拔出 U 盘。
Magic File 会在 U 盘上创建以机器人序列号命名的文件夹。
5. 软件
维修手册
65
维修手册
版权
© 2009–2020 优傲机器人公司版权所有。保留所有权利。
5.4. 数据备份
在复制/移动文件和文件夹时,操作错误可能会导致文件系统损坏。
如果对此程序不满意,请联系IT专业人员寻求帮助。
本节说明在机器人备份期间移动必要文件的过程。
5.4.1. 硬件要求
需要以下硬件:
⚫
SD卡(优傲机器人4GB工业级SD卡)
⚫
标准的SD卡读卡器
5.4.2. 软件要求
使用 Windows 操作系统时,要读取 Linux 分区,就需要软件文件系统驱动程序;在这个例子中,我们使
用 Paragon 的“Linux File Systems for Windows”,也可使用其他 Windows Linux 读取程序(但未经优
傲机器人测试)。
“Linux File Systems for Windows”由Paragon软件提供,Paragon软件是一款第三方软件。
优傲机器人对该软件概不承担任何责任。
5.4.3. 如何在Windows系统中访问Linux分区
您可以使用 Paragon 的软件访问 SD 卡上的所有分区。
所需的文件位于名为 datafs 的分区中
5. 软件
维修手册
66
维修手册
版权
© 2009–2020 优傲机器人公司版权所有。保留所有权利。
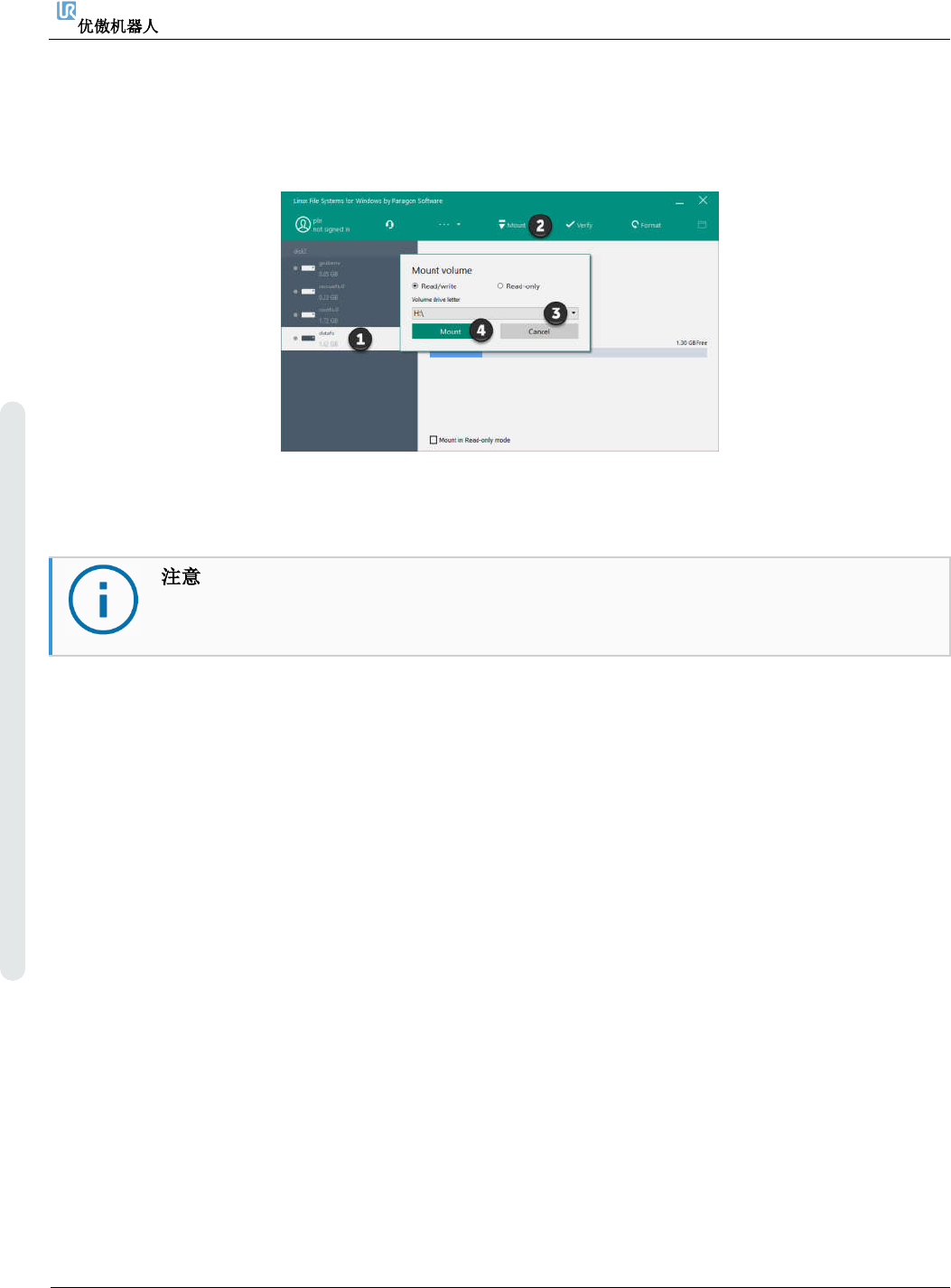
如果分区没有显示,则可能是它没有自动装入。
若要纠正此问题,请打开 Paragon 软件,选择分区(1),选择“安装”图标(2),选择卷驱动字母(3),
然后选择“安装”(4)。
5.4.4. 复制SD卡上的数据
导航至称为 datafs 的 SD 卡分区,并复制下面列出的文件/文件夹。
不要修改任何文件。您必须仅在需要时制作备份副本。
⚫
程序/[下列所有文件:.urp、.txt、.script、.installation、.variable、.old]
⚫
root/ur-serial
⚫
root/log_history.txt
⚫
root/log_history.bak [如有]
⚫
root/histogram.properties
⚫
root/flightreports [完整文件夹(如有)]
⚫
root/.urcontrol/calibration.conf
⚫
root/.urcontrol/calibration.log
⚫
root/.urcontrol/robot_calibration_summary.txt