e-Series_Service_Manual_CN.pdf - 第224页
10. 变更日志 维修手册 218 维修手册 版权 © 2009 – 20 2 0 优傲机器人公司版 权所有。保留 所有权利。 10. 变更日志 日期 版本 操作 变更 2018 年 6 月 1.0.0 开始 e 系列维修手册英文版 2018 年 8 月 1.0.1 更正 维修工具零件编号 2018 年 9 月 1.0.2 添加 错误代码描述 添加 第 3 节的检查计划 2018 年 10 月 1.0.2 添加 详细的备件清单 2019…

8. 备件
维修手册
216
维修手册
版权
© 2009–2020 优傲机器人公司版权所有。保留所有权利。
8.4.6. UR5e/UR10e/UR16e机械臂安装板(Item & BOSCH型材)-
131510
返回至总览
UR5e/UR10e/UR16e机械臂安装板(Item & BOSCH型材)- 131510
编号 数量 描述 零件号 页码
1 1
UR5e/UR10e/UR16e机械臂安装板
(Item & BOSCH型材)
131510 1
8.4.7. 工具外部电缆 - 173101
返回至总览
工具外部电缆 - 173101
编号 数量 描述 零件号 页码
1 1
工具外部电缆
1
带弯接管的电缆 - 上图未显示
9. 机器人/备件的包装和运输
维修手册
217
维修手册
版权
© 2009–2020 优傲机器人公司版权所有。保留所有权利。
9. 机器人/备件的包装和运输
将任何机器人或备件运回优傲机器人之前,请注意以下几点
发货前,请拆下外部工具和外部的电气连接。如果第三方产品无法安全地拆除,或禁止执行
所需的维修后测试,优傲机器人则可拒绝发货。如果是第三方货物退货,优傲机器人概不承
担任何责任。
请确保负责任地包装机器人、控制箱和示教器。优傲机器人将始终以优傲机器人原包装退还
优傲机器人产品。
机器人软件/固件要在维修时进行更新。新零件也会更新到最新版本(硬件/软件)。因此,
在安装新零件时,可能需要更新PolyScope。
如果机器人/零部件接触过危险化学品或材料,或在有危险化学品或材料的环境中运行,则
必须在装运前进行清洁。如果未能清洁,则必须在装运时附上英文版的MSDA(材料安全数
据表),并附上清洁说明。清洁所需的工时数将按标准费率计费。如果优傲机器人发现机器
人/零部件无法进行安全的维修,UR保留清洁机器人/零部件的权利,或者拒绝接收,并将零
部件寄回,费用由客户承担。
1. 下载put_in_box程序,网址:www.universal-robots.com/support
2. 上传put_in_box程序。有关具体做法,请参见第5.2节“使用魔法文件”。
3. 加载该程序,并按照说明运行程序。
4. 关机,断开主电源,并断开机械臂与控制器的连接。
5. 将机械臂和控制箱装入指定的箱子中。确保机械臂在箱子保持正确的方向。
10. 变更日志
维修手册
218
维修手册
版权
© 2009–2020 优傲机器人公司版权所有。保留所有权利。
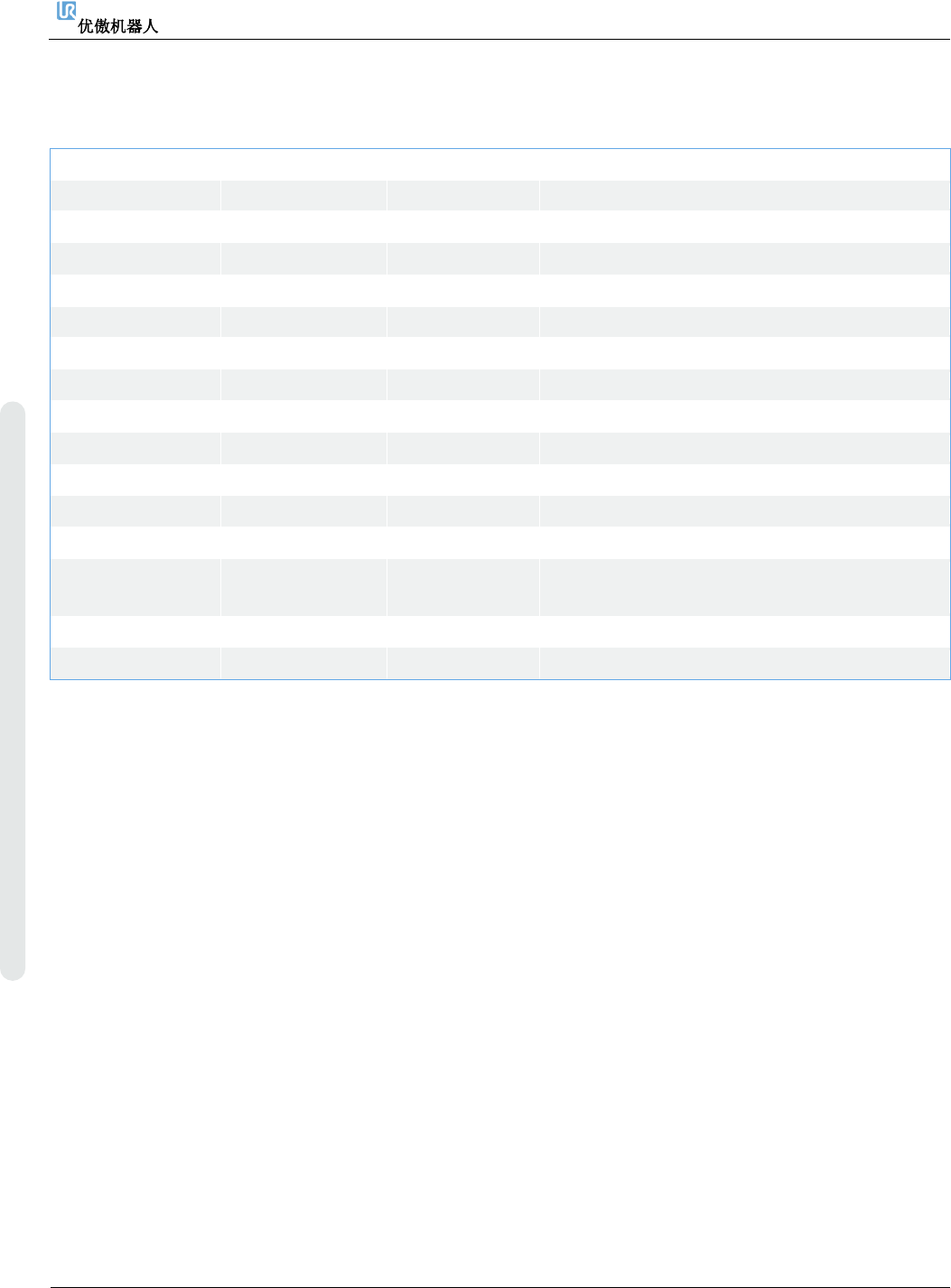
10. 变更日志
日期 版本 操作 变更
2018年6月
1.0.0
开始 e系列维修手册英文版
2018年8月
1.0.1
更正 维修工具零件编号
2018年9月
1.0.2
添加 错误代码描述
添加 第3节的检查计划
2018年10月
1.0.2
添加 详细的备件清单
2019年3月
1.0.3
更正 注意事项和阅读说明的新图标
1.0.3
更正 各种文字和图片更正
2019年6月
1.1.4
添加 UR16e参考文件
添加 OEM交流电和直流电
更正 各种文字和图片更正
2019年10月
1.1.5
变更 第3节的标题和用词
2019年11月
1.1.6
更正 关节零件号和参考资料。
2020年3月
1.1.8
添加 更新第5.1.1 节的信息。增加了5.1.2、5.1.3和
5.2的信息。错误代码更新。
2020年8月 无 添加 机器人电缆类型描述技术数据。
2020年9月 无 更新 关于3PE示教器的更新。