e-Series_Service_Manual_CN.pdf - 第36页
4. 维修和更换零件 维修手册 30 维修手册 版权 © 2009 – 20 2 0 优傲机器人公司版 权所有。保留 所有权利。 1. 拆下蓝 色盖子上的 螺钉, 然后按照章节 分离关节 与配对关节的通用指南 所述 ,拆下蓝色盖子 。 2. 按照章 节 “ 关节上的电 源和通信连接器类型 ” 和 “ 关节上的连 接器位置 ” 中所 述, 地从端子上拆 下电源和通信电线 。 3. 取下黑 色扁型环。 可以使用小平头 螺丝 刀。 4. 拆下…
4. 维修和更换零件
维修手册
29
维修手册
版权
© 2009–2020 优傲机器人公司版权所有。保留所有权利。
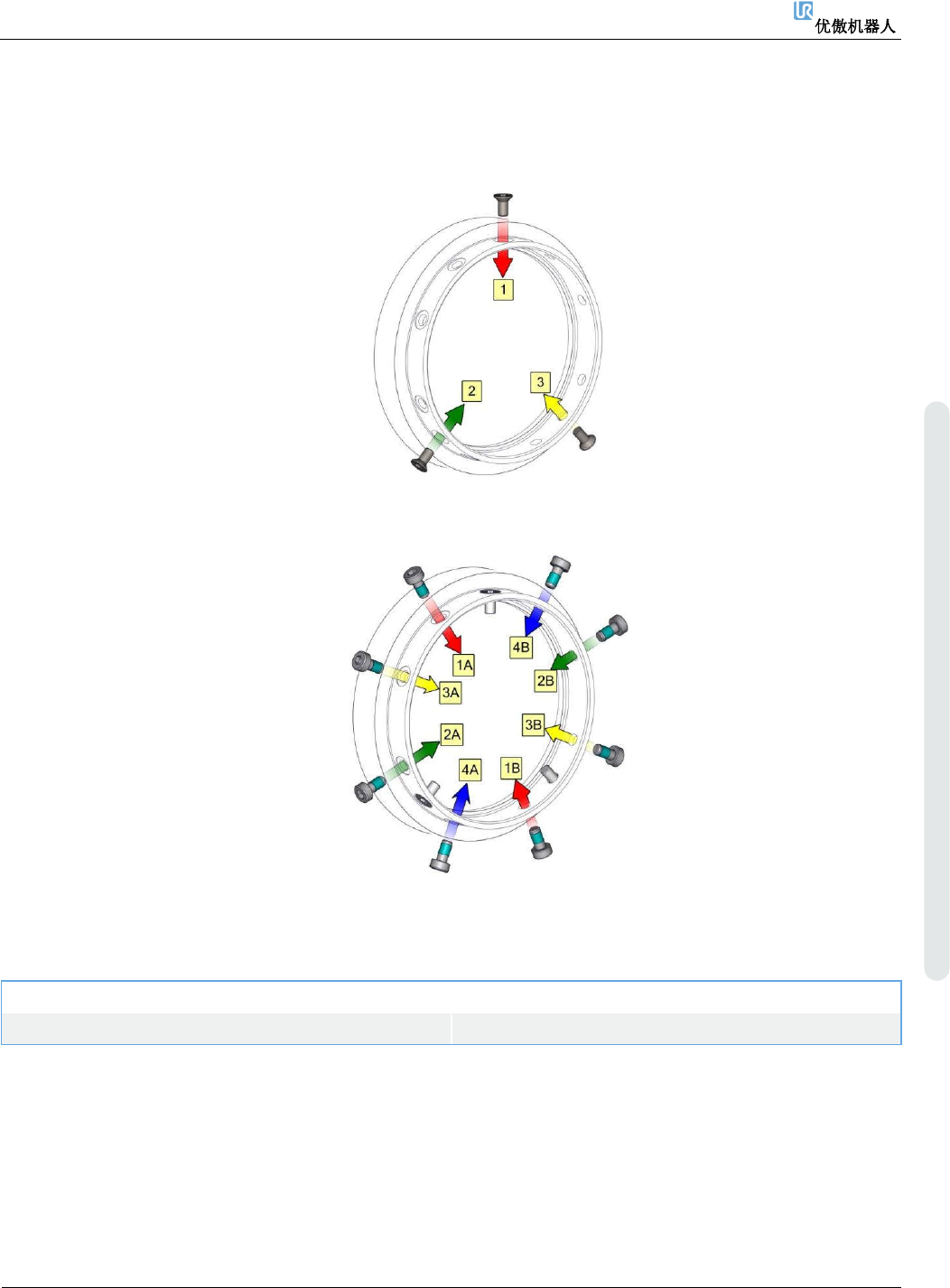
1. 根据标记(在下图中,用红色箭头表示)确定关节的方向,并将两个关节轻轻地推到一起。
2. 根据下图示例,插入六角沉头螺钉,并拧紧。不要超过建议的扭矩。
示例:1、2、3
3. 根据下图示例,插入六角螺钉,并拧紧。不要超过建议的扭矩。
示例:1A、1B、2A、2B等。
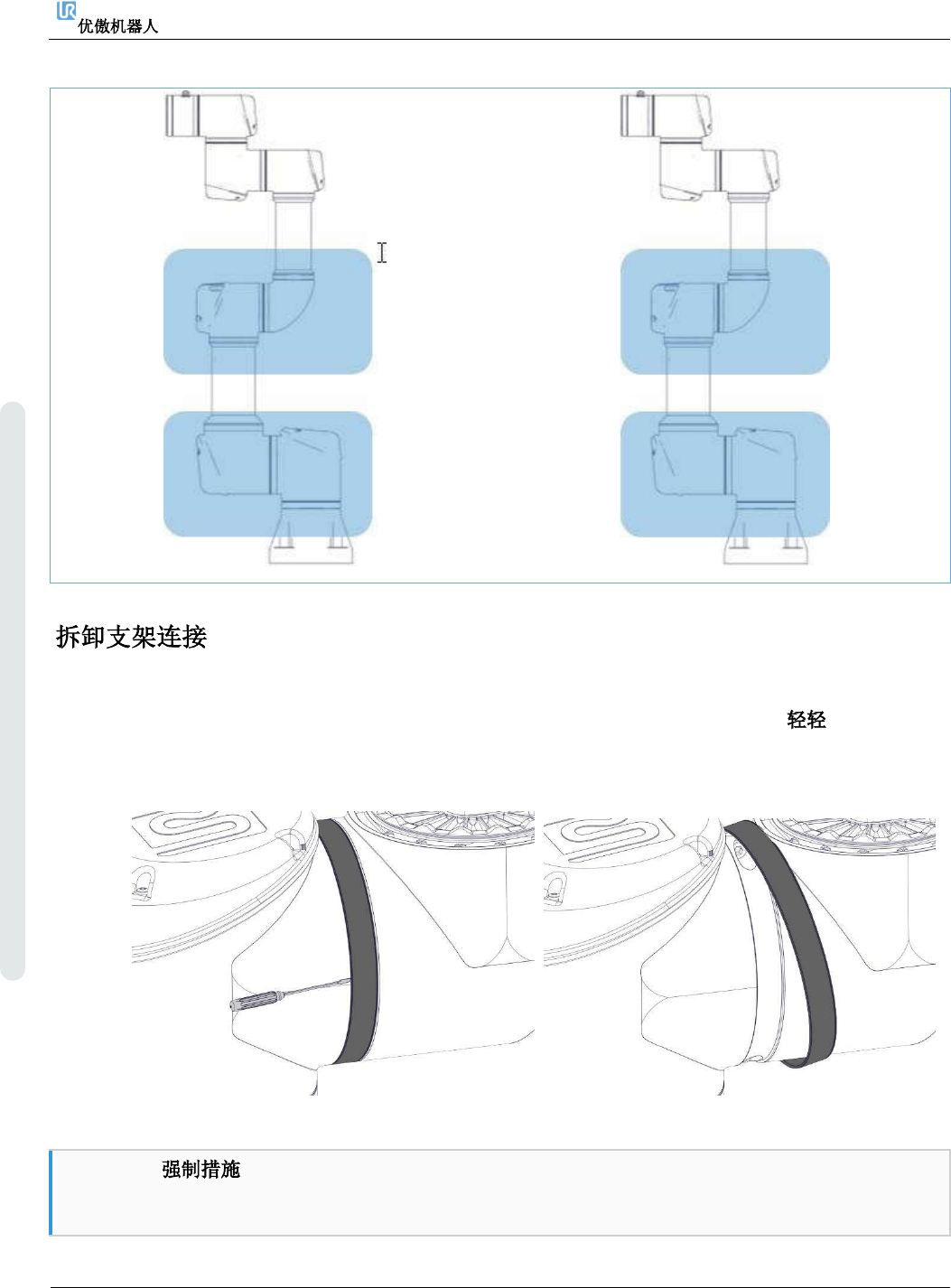
4.2.8. 支架连接
以下两节描述拆卸和组装支架连接关节的方式。
支架连接位置
UR5e
Ur10e 和 UR16e
4. 维修和更换零件
维修手册
30
维修手册
版权
© 2009–2020 优傲机器人公司版权所有。保留所有权利。
1. 拆下蓝色盖子上的螺钉,然后按照章节分离关节与配对关节的通用指南所述,拆下蓝色盖子。
2. 按照章节“关节上的电源和通信连接器类型”和“关节上的连接器位置”中所述, 地从端子上拆
下电源和通信电线。
3. 取下黑色扁型环。可以使用小平头螺丝刀。
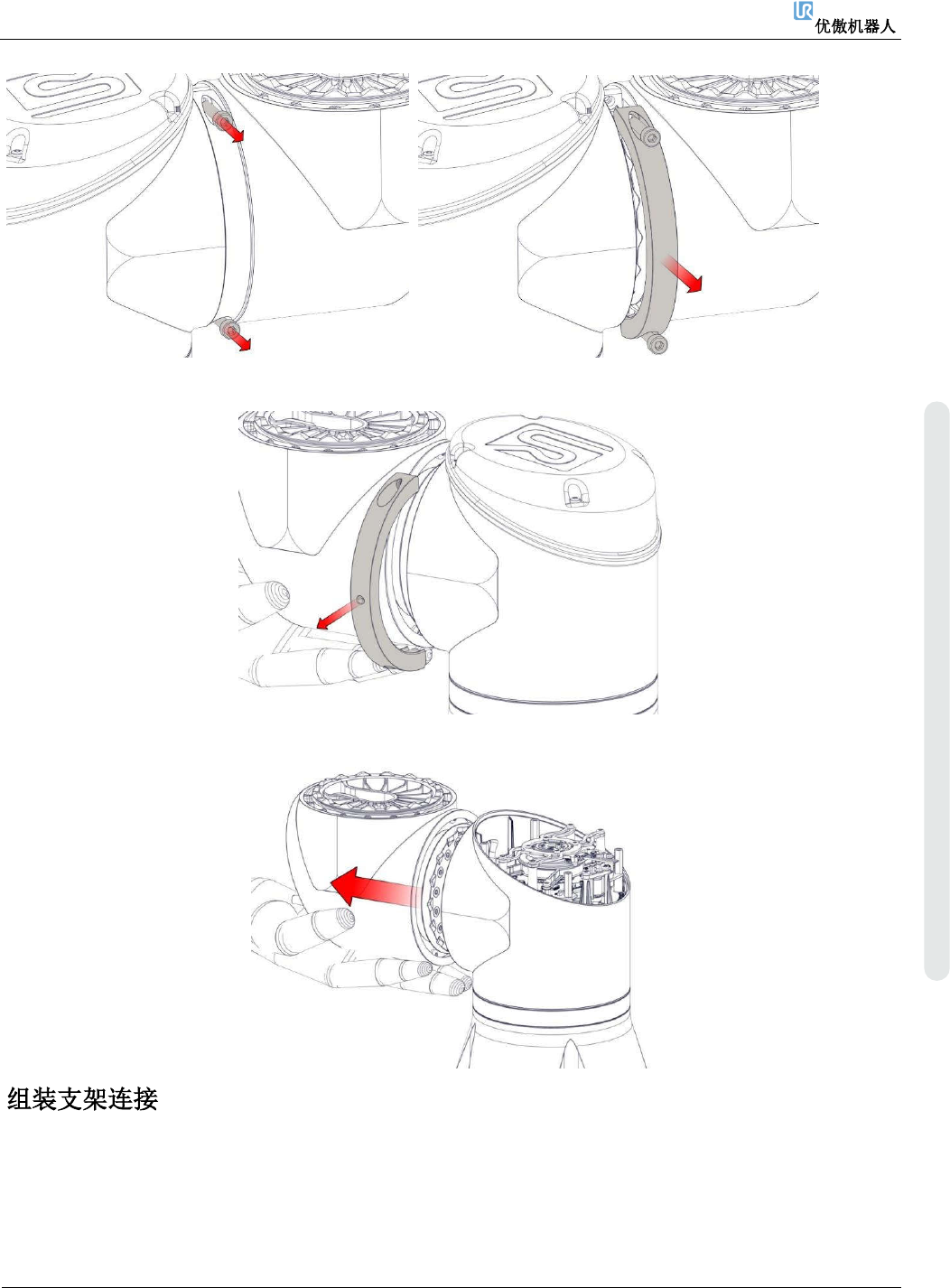
4. 拆下螺钉和一侧的支架。
拆卸支架时,如果没有支撑,关节就会脱落。
4. 维修和更换零件
维修手册
31
维修手册
版权
© 2009–2020 优傲机器人公司版权所有。保留所有权利。
5. 拆除支架的另一侧时,要用东西支撑关节。
6. 关节现已松动,可以拆除。也要记得拔出电线。
组装与拆卸的顺序相反。但是,在开始组装之前,还有几点需要注意。