e-Series_Service_Manual_CN.pdf - 第95页
6. 故障排除 维修手册 89 维修手册 版权 © 2009 – 20 2 0 优傲机器人公司版 权所有。保留 所有权利。 C68A SPI 错误 关节: 绝对值编码器出现关节通 信错误 a) 检查是否出现短路。 b) 执行完整的重启序列。 c) 如 果 这 种 情 况 连 续 发 生 两次以上,请更 换关节 C70A 即 将 达 到 变 速 箱 剪 切 限 值 加 速 度 / 减速 度 过高 。编 码器 安 装引起的齿轮机 械问题 a…
6. 故障排除
维修手册
88
维修手册
版权
© 2009–2020 优傲机器人公司版权所有。保留所有权利。
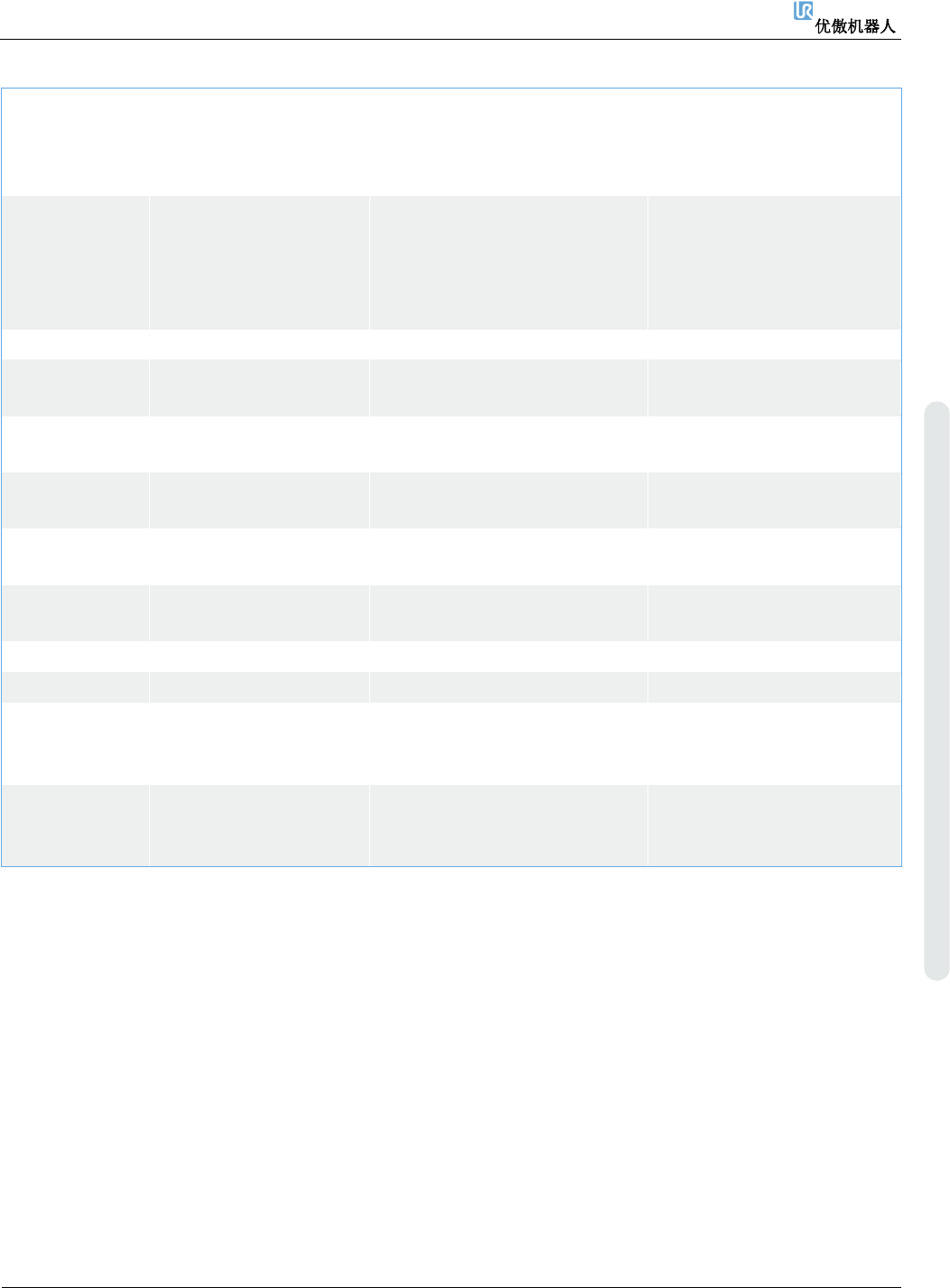
C58A
电机编码器未校准
C59A
过流关机 关节过流。自变数 = 电流(安
)
a) 检查是否出现短路。
b) 执行完整的重启序列。
c) 如果这种情况连续发生
两次以上,请更换关节
C60A
电能盈余关机 电源向耗能装置输送能量 a) 确保电网输送的电压不
超过48V
b) 测量机器人的能量输入
c) 请联系您当地的优傲机
器人服务提供商寻求帮
助。
C61A
空闲功耗过高 系统空闲时消耗的电量超出预
期。
a) 检查耗能装置电缆和连
接
b) 检查耗能装置
c) 更换耗能装置
C62A
散热问题
a) 检查是否有物体阻碍关
节的自由运动。
b) 检查工具中心点配置、
有效负载和安装设置
C62A1
关节温度:高(80℃)
C62A3
警告:静负载过高
C62A11
关节温度:关机(85℃)
C62A13
关机:静负载过高
C63A
电 机 测 试 在 第
{unsigned}步时失败。
C65A
PSU 电压过高 电源输出电压高于48.7V a) 确 保 电 源 输 出 不 超 过
48V
b) 联系支持部门
6. 故障排除
维修手册
89
维修手册
版权
© 2009–2020 优傲机器人公司版权所有。保留所有权利。
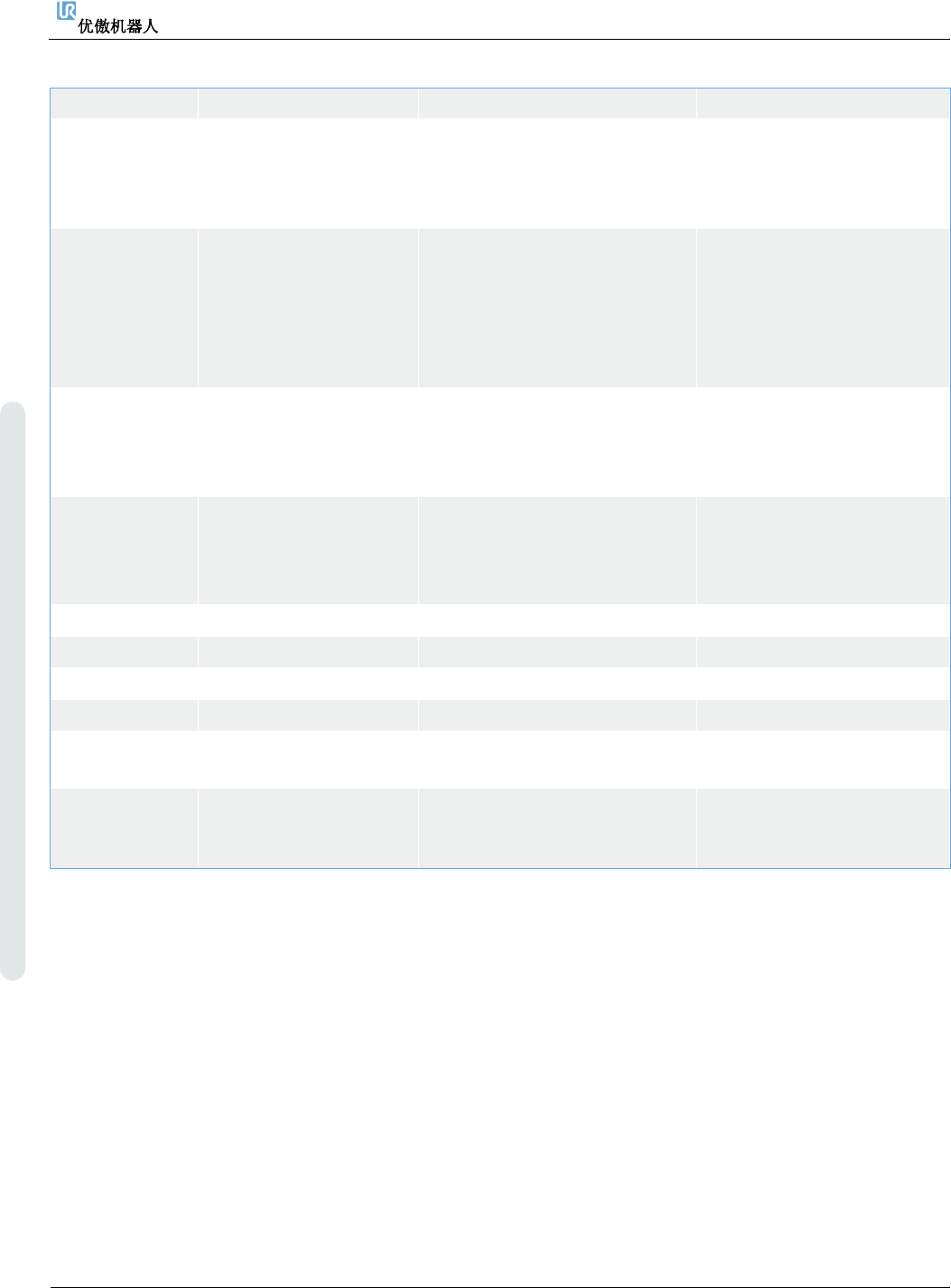
C68A
SPI错误 关节:绝对值编码器出现关节通
信错误
a) 检查是否出现短路。
b) 执行完整的重启序列。
c) 如果这种情况连续发生
两次以上,请更换关节
C70A
即将达到变速箱剪切限
值
加速度/减速度过高。编码器安
装引起的齿轮机械问题
a) 在用户程序中降低加速
度。
b) 执行完整的重启序列。
c) 如果这种情况连续发生
两次以上,请更换关节
C71A
启动检查错误
C71A0
硬件为尺寸0,关节的固
件错误
更新固件
C71A1
硬件为尺寸1,关节的固
件错误
更新固件
C71A2
硬件为尺寸2,关节的固
件错误
更新固件
C71A3
硬件为尺寸3,关节的固
件错误
更新固件
C71A4
硬件为尺寸4,关节的固
件错误
更新固件
C71A5
硬件版本无效
C71A6
ADC校准失败
C71A7
未知错误结果 电机电线损坏,螺钉端子连接不
良或PCB存在缺陷
a) 检查关节连接是否损坏
或松动。
b) 更换关节
C71A8
电机接地短 路或H桥出
现问题
电机电线损坏,螺钉端子连接不
良或PCB存在缺陷
a) 检查关节连接是否损坏
或松动。
b) 更换关节
6. 故障排除
维修手册
90
维修手册
版权
© 2009–2020 优傲机器人公司版权所有。保留所有权利。
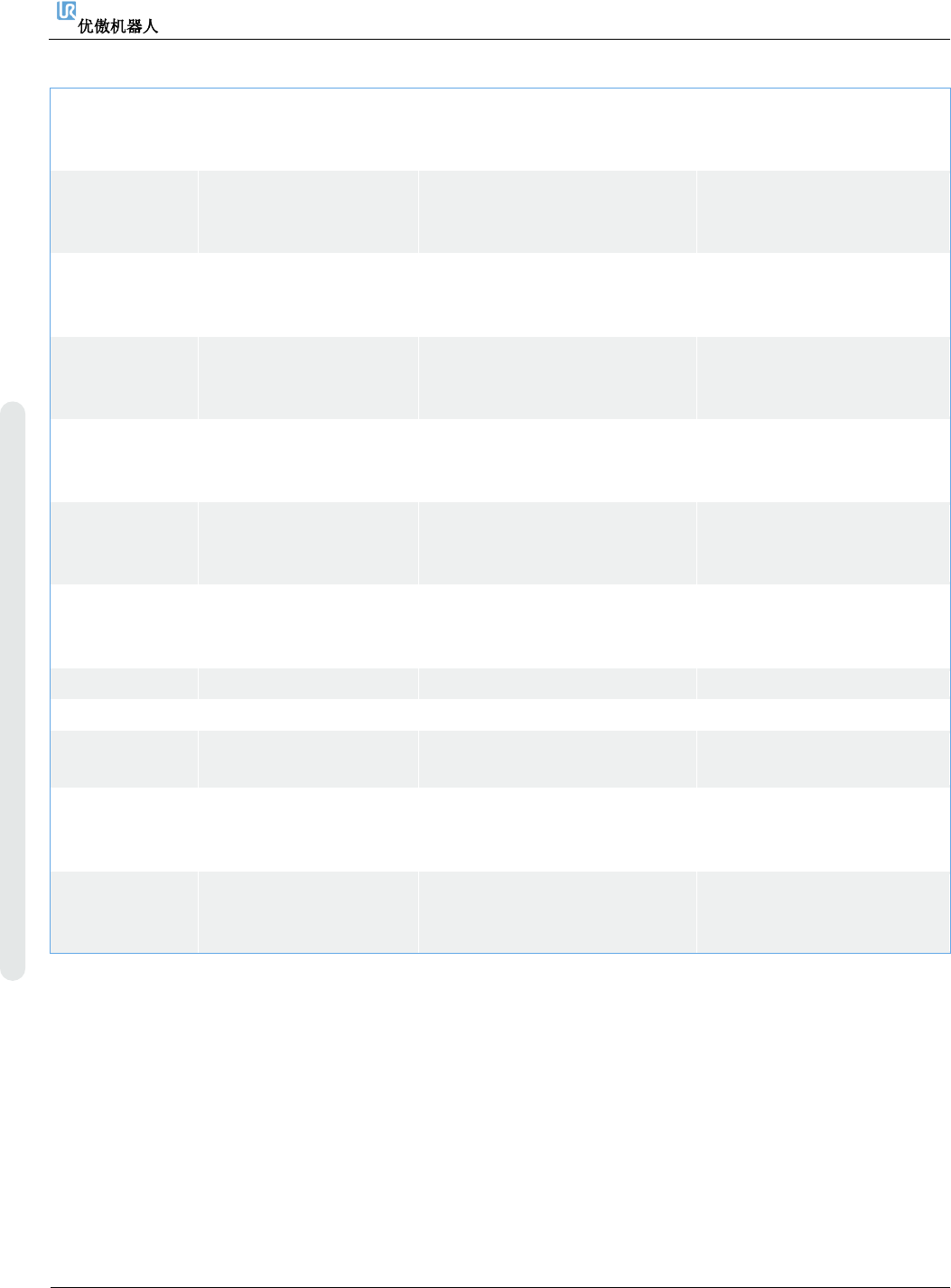
C71A9
电机指示信号不工作 电机电线损坏,螺钉端子连接不
良或PCB存在缺陷
a) 检查关节连接是否损坏
或松动。
b) 更换关节
C71A10
第1相位未连接或不工作 电机电线损坏,螺钉端子连接不
良或PCB存在缺陷
a) 检查关节连接是否损坏
或松动。
b) 更换关节
C71A11
第2相位未连接或不工作 电机电线损坏,螺钉端子连接不
良或PCB存在缺陷
a) 检查关节连接是否损坏
或松动。
b) 更换关节
C71A12
第3相位或多个相位未连
接或不工作
(2)
电线(1)损坏或与PCB的
连接断开(不太可能)或PCB
存在缺陷
a) 检查关节连接是否损坏
或松动。
b) 更换关节
C71A50
电流传感器测试失败 传感器在探测时报告了错误电
流
a) 检查关节连接是否损坏
或松动。
b) 更换关节
C71A51
电流传感器测试失败 传感器在探测时报告了错误电
流
a) 检查关节连接是否损坏
或松动。
b) 更换关节
C71A52
电流传感器测试失败 传感器在探测时报告了不同的
电流
a) 检查关节连接是否损坏
或松动。
b) 更换关节
C71A101
RLS编码器的固件错误
C72A
电源装置故障
C72A1
0个电源处于启用状态 电源无法提供48V的电压 检查电源与安全控制板之间
的电源连接
C72A2
1个电源处于启用状态,
但我们希望是2个(UR10
)
电 源 无 法 为 UR5 机 器 人 提 供
48V的电压或UR10闪存卡
检查电源与安全控制板之间
的电源连接,并检查闪存卡
与机器人是否相匹配
C72A3
2个电源处于启用状态,
但我们希望是1个(UR5
)
UR10机器人中的UR5闪存卡 检查闪存卡与机器人是否相
匹配