e-Series_Service_Manual_CN.pdf - 第148页
6. 故障排除 维修手册 142 维修手册 版权 © 2009 – 20 2 0 优傲机器人公司版 权所有。保留 所有权利。 C283A64 正 常 模 式 的 工 具 方 向 矢 量长度为 {float} ,而不是 1.0 重新配置工具方 向 C283A65 减 速 模 式 的 工 具 方 向 矢 量长度为 {float} ,而不是 1.0 重新配置工具方 向 C283A66 机 器 人 动 量 达 到 {float} kg*m/s …
6. 故障排除
维修手册
141
维修手册
版权
© 2009–2020 优傲机器人公司版权所有。保留所有权利。
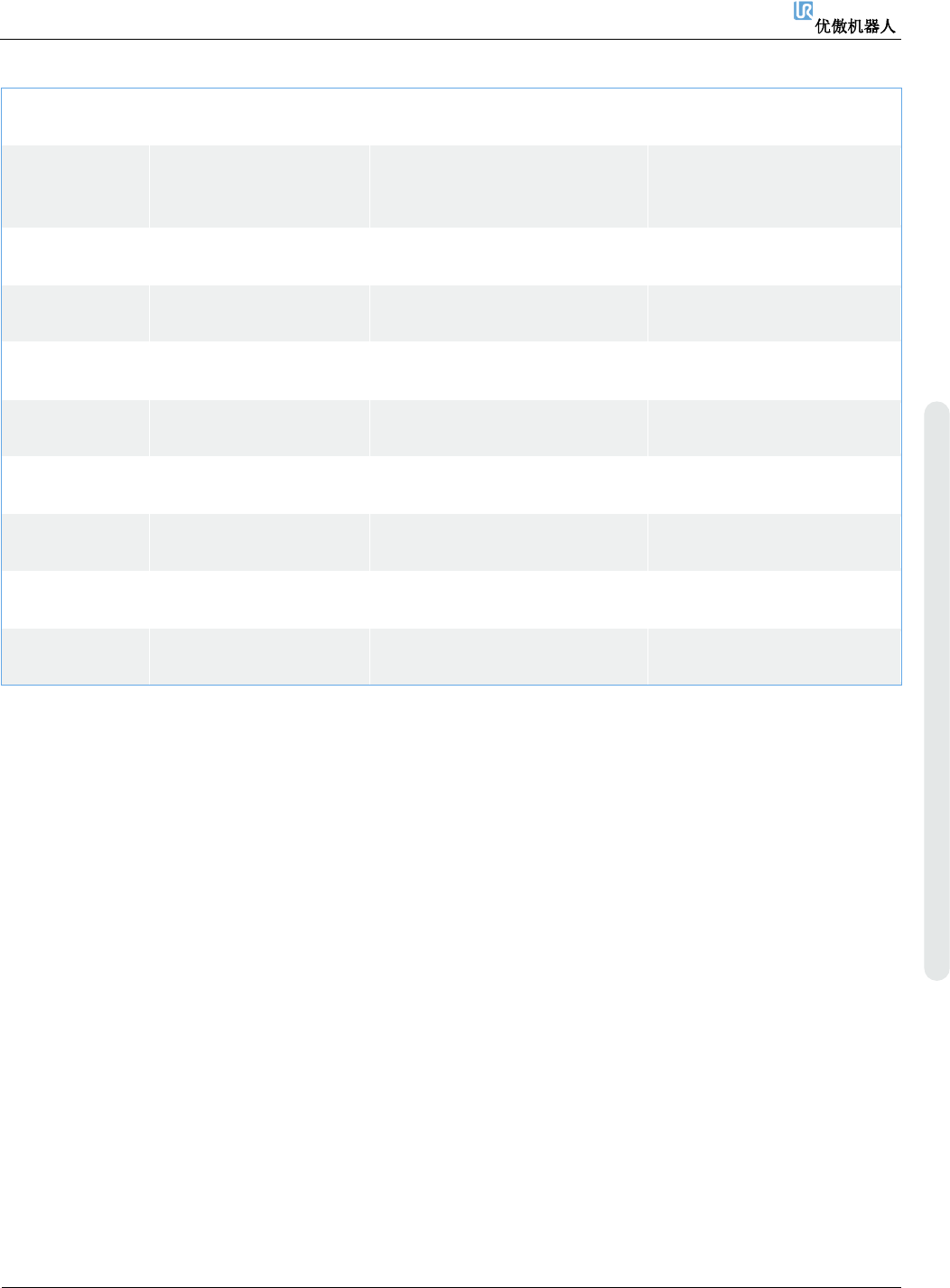
C283A54
减速模式下的最大肘部
速度无效
确保减速模式限值小于或等
于正常模式限值。
C283A55
减 速 模 式 下 的 关 节
{unsigned} 最 大 关 节 速
度无效
确保减速模式限值小于或等
于正常模式限值。
C283A56
减速模式下的最大动量
无效
确保减速模式限值小于或等
于正常模式限值。
C283A57
减速模式下的最长停止
时间无效
确保减速模式限值小于或等
于正常模式限值。
C283A58
减速模式下的最长停止
距离无效
确保减速模式限值小于或等
于正常模式限值。
C283A59
减速模式输出未激活 无法激活减速模式输出。电压低
时,输出激活
确保输出与电源之间没有短
路
C283A60
减速模式输出未停用 无法停用减速模式输出。电压高
时输出停用
确保输出与地之间未短路
C283A61
非减速模式输出未激活 无法激活非减速模式输出。电压
低时,输出激活
确保输出与电源之间没有短
路
C283A62
非减速模式输出未停用 无法停用非减速模式输出。电压
高时输出停用
确保输出与地之间未短路
C283A63
机器人正在移动,而机器
人移动输出未激活
无法激活机器人移动输出。电压
低时,输出激活
确保输出与电源之间没有短
路
6. 故障排除
维修手册
142
维修手册
版权
© 2009–2020 优傲机器人公司版权所有。保留所有权利。
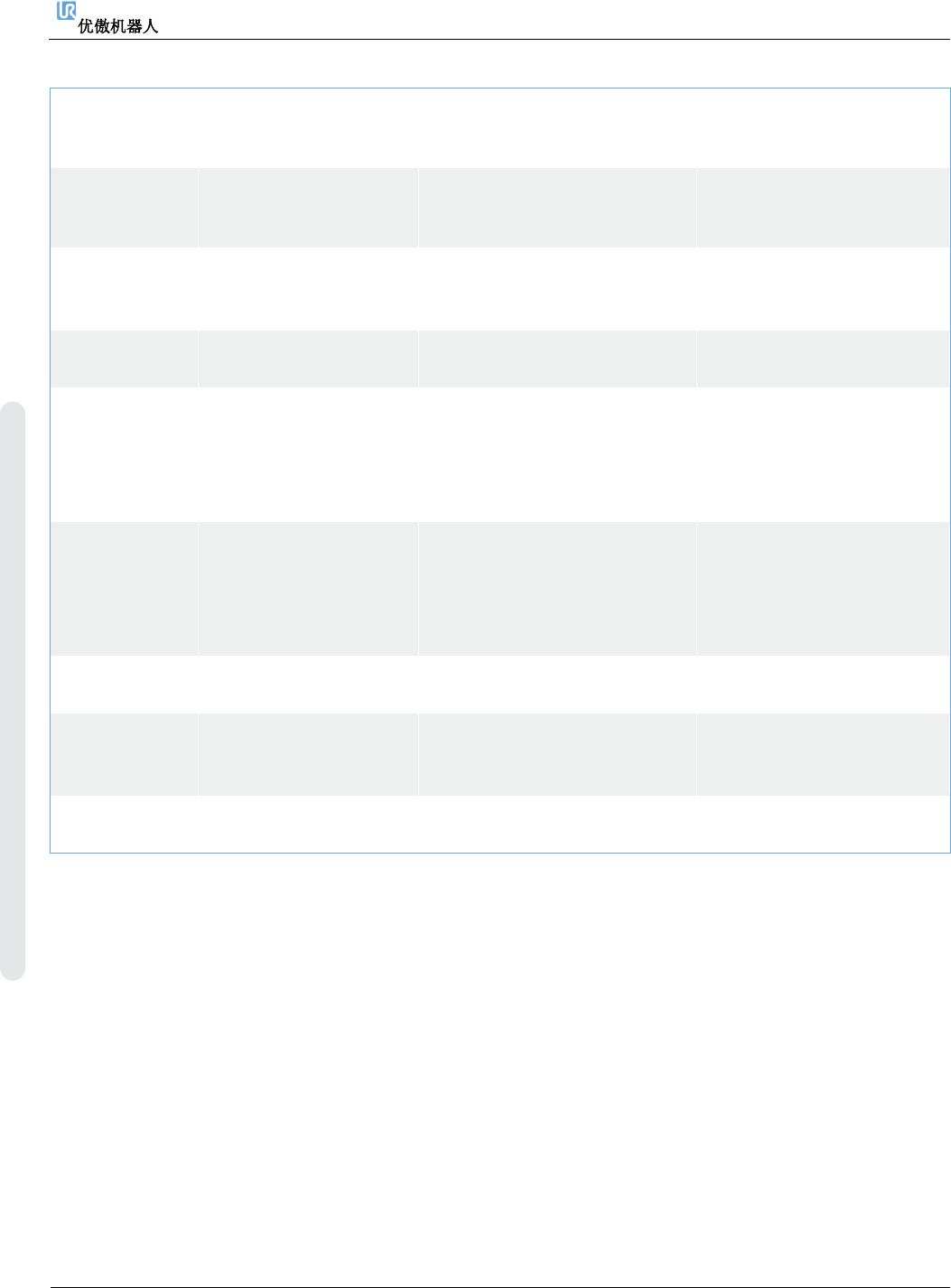
C283A64
正常模式的工具方向矢
量长度为{float},而不是
1.0
重新配置工具方向
C283A65
减速模式的工具方向矢
量长度为{float},而不是
1.0
重新配置工具方向
C283A66
机 器 人 动 量 达 到
{float}kg*m/s,超过动量
限值
C283A67
机器人功率达到{float}W
,超过功率限值
C283A68
{unsigned} 关 节 引 发 的
错误
严重的安全错误 a) 执行完整的重启序列
b) 更新软件
c) 请联系您当地的优傲机
器人服务提供商寻求帮
助。
C283A72
控制箱发送的电机配置
无效
发送的电机配置无法在此固件
版本中使用。
a) 执行完整的重启序列
b) 更新软件
c) 请联系您当地的优傲机
器人服务提供商寻求帮
助。
C283A73
安全系统内的安全起始
位置输出不一致
检查起始位置
C283A74
在不允许的情况下,安全
起始位置输出处于激活
状态
机器人未在安全起始位置时,安
全起始位置输出处于激活状态
确保输出与电源或地之间没
有短路
C283A81
机器人配置指定了不支
持的关节尺寸
安全系统未经过认证,无法在指
定的关节尺寸下运行
升级到较新的软件版本
6. 故障排除
维修手册
143
维修手册
版权
© 2009–2020 优傲机器人公司版权所有。保留所有权利。
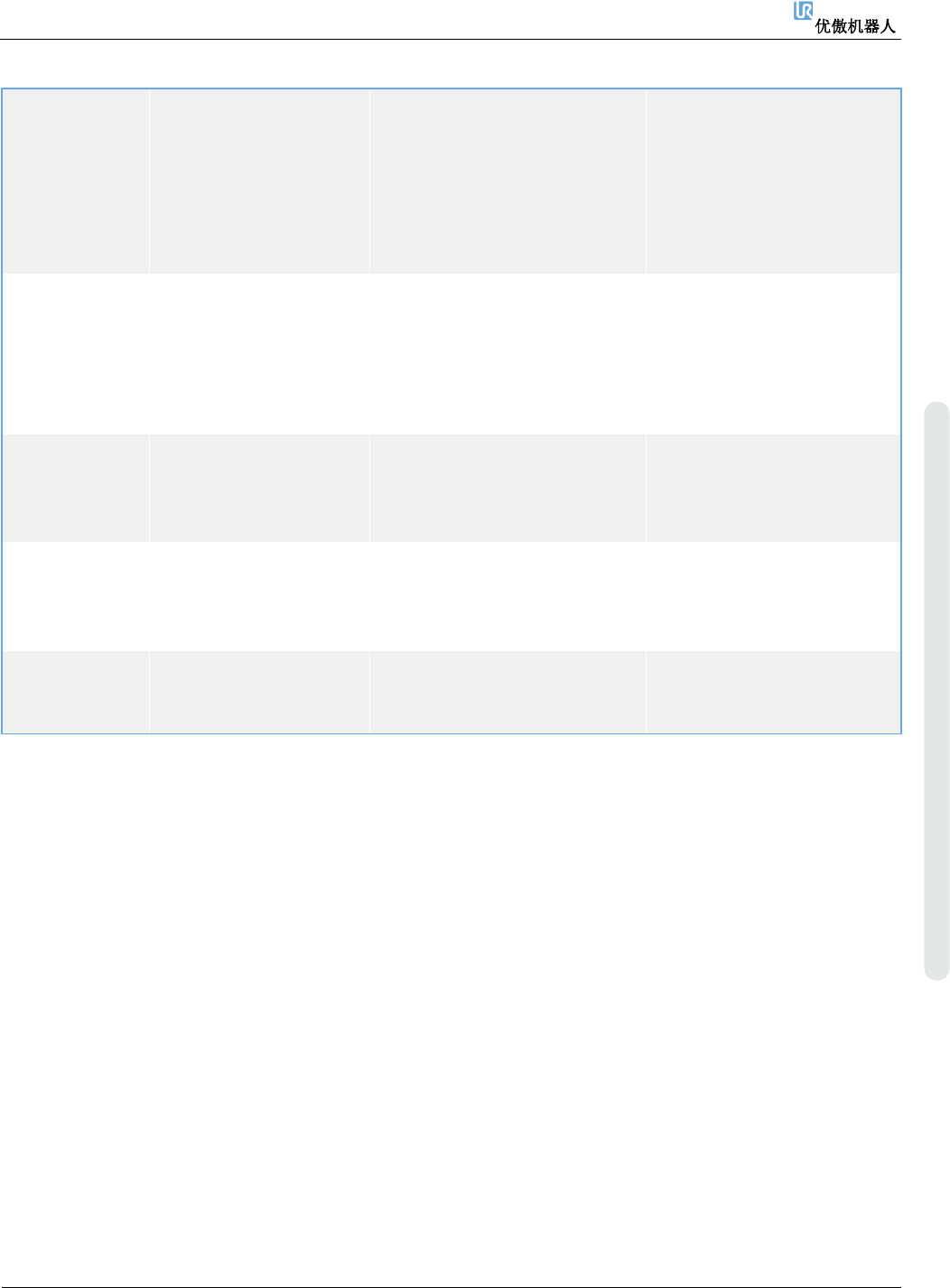
C283A82
连接的示教器类型与配
置不符
连接的示教器与安全配置中选
择的类型不一样
a) 检查示教器的连接是否
正确,并与安全配置中
的示教器相符
b) 执行完整的重启序列
c) 更新软件
d) 联系您当地的优傲机器
人技术支持团队
C283A83
配置的示教器没有 3 位
安全使能装置
安全配置启用示教器的 3 位安
全使能装置,但配置的示教器
没有 3 位安全使能装置
a) 检查安全配置中选择的
示教器是否正确
b) 执行完整的重启序列
c) 更新软件
d) 联系您当地的优傲机器
人技术支持团队
C283A85
安全系统内的自动安全
停止输入不一致
输入信号没有同时切换或连接
不正确
a) 确保两个输入都正确连
接
b) 请联系当地的优傲机器
人服务提供商寻求帮助
C283A86
安全系统内的自动安全
重置输入不一致
输入信号没有同时切换或连接
不正确
a) 确保两个输入都正确连
接
b) 请联系当地的优傲机器
人服务提供商寻求帮助
C283A87
注塑机接口在机器人配
置中被禁用时,其被连接
如果启用了注塑机接口,则必
须连接。如果被禁用,就必须
断开连接
断开注塑机接口连接或在配
置中启用