e-Series_Service_Manual_CN.pdf - 第75页
6. 故障排除 维修手册 69 维修手册 版权 © 2009 – 20 2 0 优傲机器人公司版 权所有。保留 所有权利。 6.3. 错 误代码 在错误代码中, 多 个术语用于同一 个组件和代码,直到 C271 在机 器人世代 之间 共享 。 ⚫ 在安全控制板上: 处理器 A = A uP = SafetySys1 ⚫ 在安全控制板上: 处理器 B = B uP = SafetySys2 ⚫ PSU = 电源 ⚫ PC = 控制器 C0…
6. 故障排除
维修手册
68
维修手册
版权
© 2009–2020 优傲机器人公司版权所有。保留所有权利。
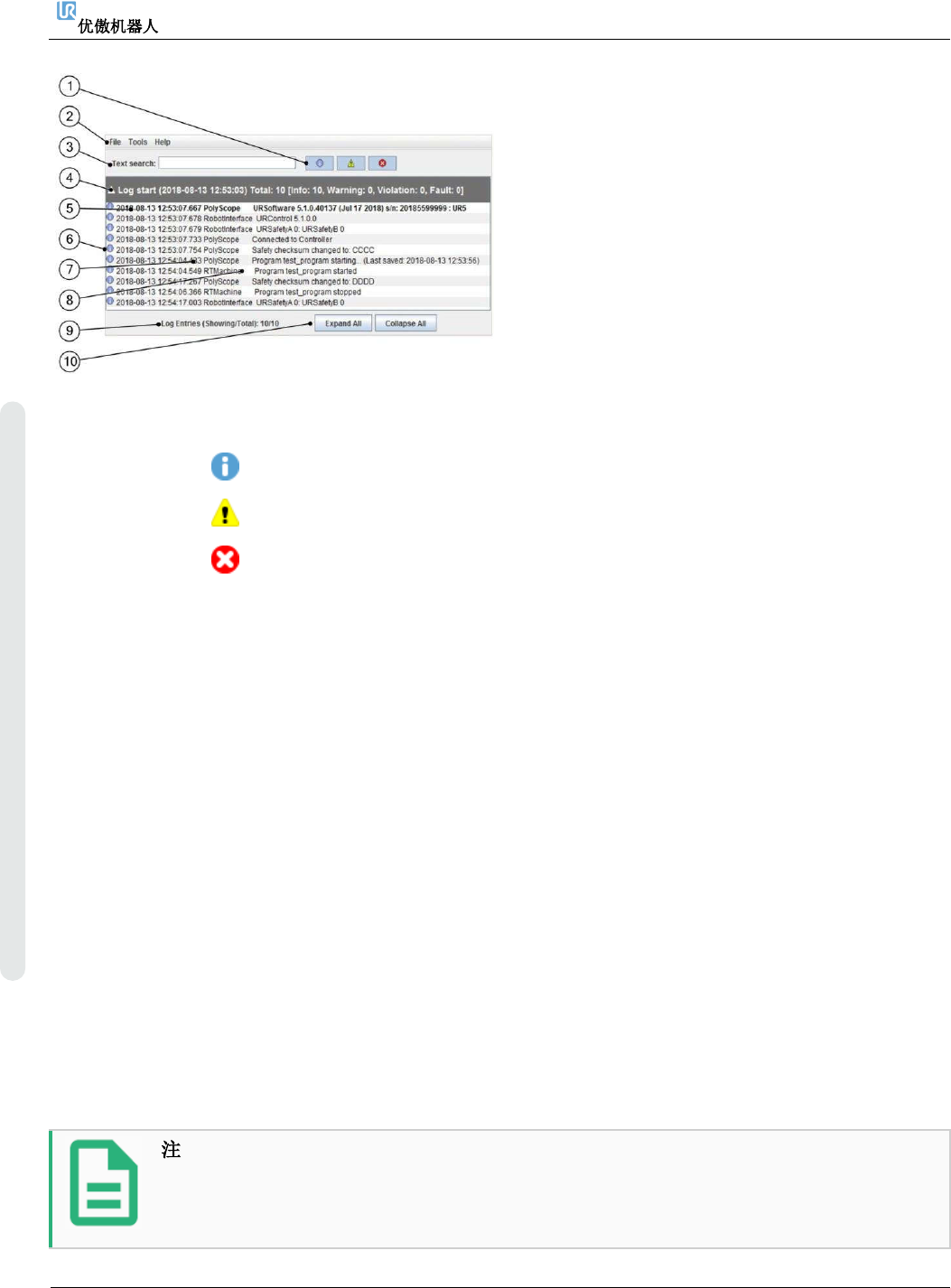
1. 筛选器;
选择要激活的筛选器
信息筛选器:
警告筛选器:
错误筛选器:
2. 工具栏;
加载日志文件,导出错误代码,更改语言
3. 文字搜索;
键入错误代码或文本
4. 日志启动信息栏*;
机器人每次通电时创建。
5. 突出显示的文本;
点击时,会给出更详细的信息。
6. PolyScope时间
7. 报告者;
信息是由“安全、PolyScope等”报告的。
8. 消息;
带Cxxxx的文字是指错误代码。
9. 日志条目;
显示与总计
10. 展开或折叠所有信息栏(第4项)
加载日志文件后,每个日志启动信息栏(4)都会被折叠,只有每个日志启动的摘要可见。

6. 故障排除
维修手册
69
维修手册
版权
© 2009–2020 优傲机器人公司版权所有。保留所有权利。
6.3. 错误代码
在错误代码中,多个术语用于同一个组件和代码,直到 C271 在机器人世代之间共享。
⚫
在安全控制板上:处理器 A = A uP = SafetySys1
⚫
在安全控制板上:处理器 B = B uP = SafetySys2
⚫
PSU = 电源
⚫
PC = 控制器
C0A
无错误
C1A
输出缓冲器过流
C1A1
存储警告的缓冲器过流
C1A2
RS485 的输出缓冲器过
流(控制器消息出现问
题)
C2A
输入缓冲器过流
C3A
处理器过载
C4A
通信问题
C4A1
与控制器的通信中断。
安全控制板与主机板之
间
a) 检 查 安 全控 制 板与
主机板之间的网线,
检 查 脚 本 或 UR+ 软
件 是 否 使 安 全 控制
板 与 主 机 板 之 间的
通信过载。
b) 执 行 完 整的 重 启序
列。
c) 更新软件
6. 故障排除
维修手册
70
维修手册
版权
© 2009–2020 优傲机器人公司版权所有。保留所有权利。
C4A2
与安全控制板 A uP 之间的
通信丢失
a) 检查主机板与安全控制板
之间的TCP/IP连接。
b) 执行完整的重启序列。
c) 更换安全控制板
C4A3
与安全控制板 B uP 之间的
通信丢失
a) 检查主机板与安全控制板
之间的 TCP/IP 连接。
b) 执行完整的重启序列。
c) 更换安全控制板
C4A4
与主示教器 uP 之间的通信
丢失
a) 检查主机板与示教器之间
的 RS485-12V 连接。
b) 执行完整的重启序列。
c) 更换示教器
C4A5
与辅助示教器 uP 之间的通
信丢失
a) 检查主机板与示教器之间
的 RS485-12V 连接。
b) 执行完整的重启序列。
c) 更换示教器
C4A6
与主 EUROMAP67 uP 之间
的通信丢失
a) 检查主机板与示教器之间
的 Euromap67 连接。
b) 执行完整的重启序列。
c) 更换示教器