e-Series_Service_Manual_CN.pdf - 第170页
6. 故障排除 维修手册 164 维修手册 版权 © 2009 – 20 2 0 优傲机器人公司版 权所有。保留 所有权利。 ii. 机器人的操作即将接近限值,应调整应用,以减少机器人的负载,比如减少加速度,正确使用 混合或类似措施。 2. 如果保护性停止的自动 确认和重置已经进行编程, 则没有人会 看到保护性 停止。 保护性停 止的自动确认 和重置会掩盖将导 致故障状 况的 错误 。 如果出现 保护性停止, 就要核实原因。 如果没有 …
6. 故障排除
维修手册
163
维修手册
版权
© 2009–2020 优傲机器人公司版权所有。保留所有权利。
在以下两种情况下,这些故障可能会隐藏起来:
1. 工作人员只是简单地重置故障,而不考虑引起故障的原因。
忽略保护性停止会掩盖故障检测!
要小心注意保护性停止。
了解它们为什么会改进您的程序并保留故障检测!
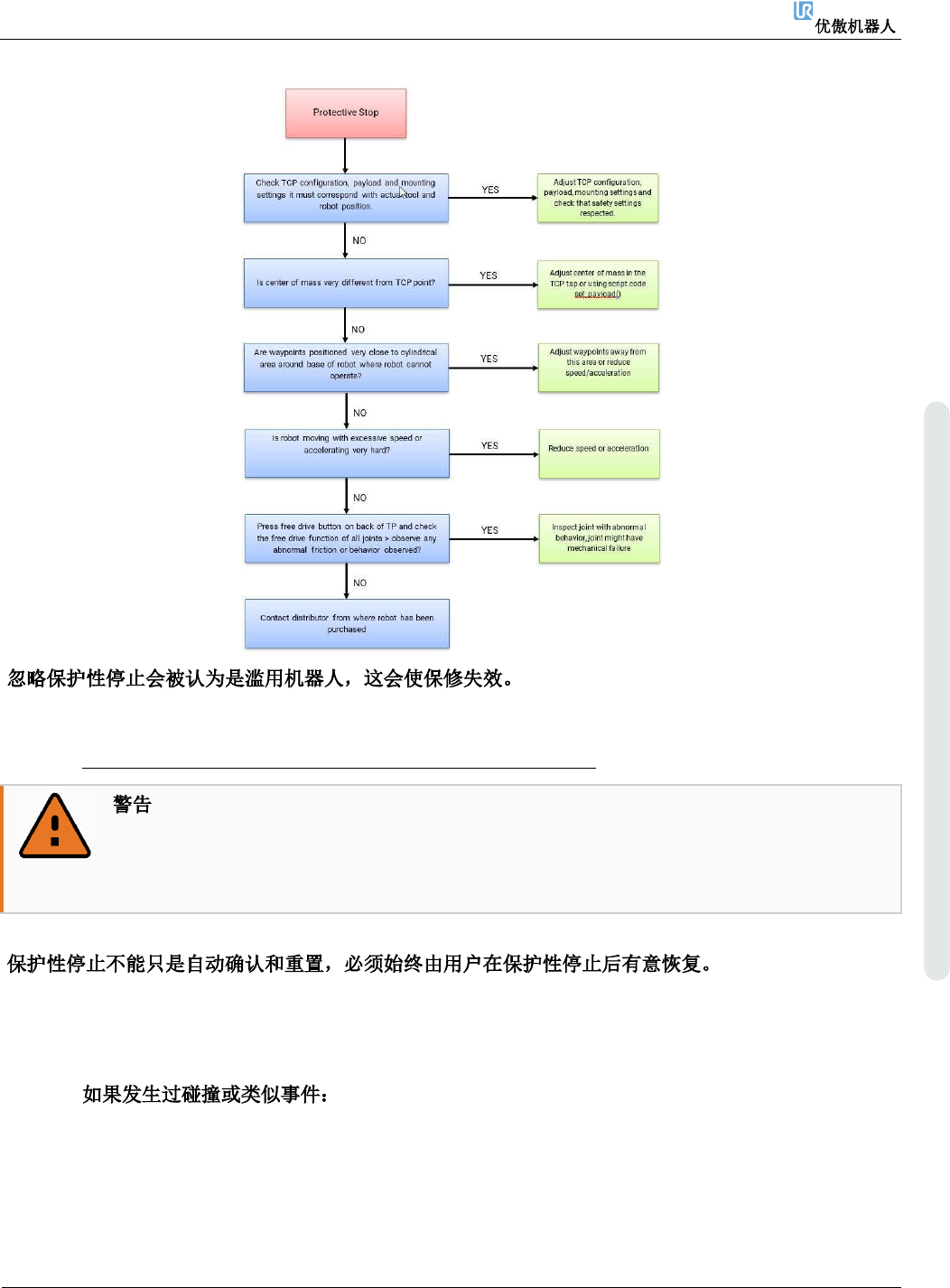
一般来说,保护性停止是为了通知用户机器人因外部事件(如撞到障碍物或类似事件)而停止。在机器
人被逼近极限的情况下,机器人会产生保护性停止,以表明它们无法按照所需的轨迹操作。保护性停止
后,必须完成以下工作才能恢复运行:
i.
移除障碍物并确保操作人员离开后才能再恢复操作。请参见维修手册第2节(参见下面的链接)。
6. 故障排除
维修手册
164
维修手册
版权
© 2009–2020 优傲机器人公司版权所有。保留所有权利。
ii.
机器人的操作即将接近限值,应调整应用,以减少机器人的负载,比如减少加速度,正确使用
混合或类似措施。
2. 如果保护性停止的自动确认和重置已经进行编程,则没有人会看到保护性停止。
保护性停止的自动确认和重置会掩盖将导致故障状况的错误。
如果出现保护性停止,就要核实原因。
如果没有发生碰撞,则要调整程序。
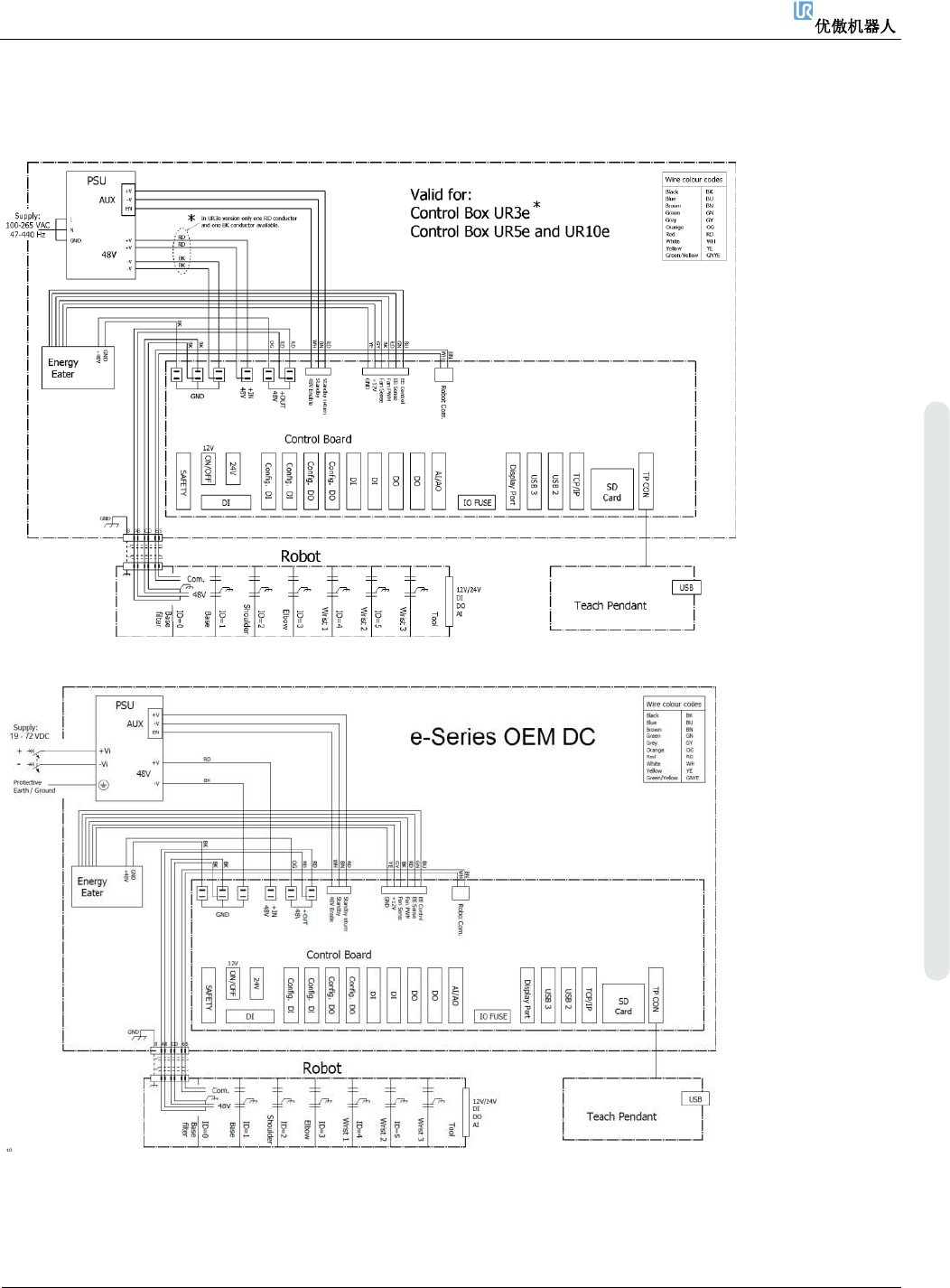
7. 电气图纸
维修手册
165
维修手册
版权
© 2009–2020 优傲机器人公司版权所有。保留所有权利。
7. 电气图纸