e-Series_Service_Manual_CN.pdf - 第19页
3. 建议的检查活动 维修手册 13 维修手册 版权 © 2009 – 20 2 0 优傲机器人公司版 权所有。保留 所有权利。 1. 根据工具规格,拆 下附属 装置或设置工具中心点( TCP ) / 有效负 载 /CoG 。 2. 若要在自由驱动模 式下移 动机械臂: ⚫ 按住在标准示教器 上的 “Freedrive (自 由驱动) ” 按 钮。 ⚫ 如果是 3PE 示教器, 则要快速轻按,然 后轻轻按住 3PE 按钮。 标准示教器 …
3. 建议的检查活动
维修手册
12
维修手册
版权
© 2009–2020 优傲机器人公司版权所有。保留所有权利。
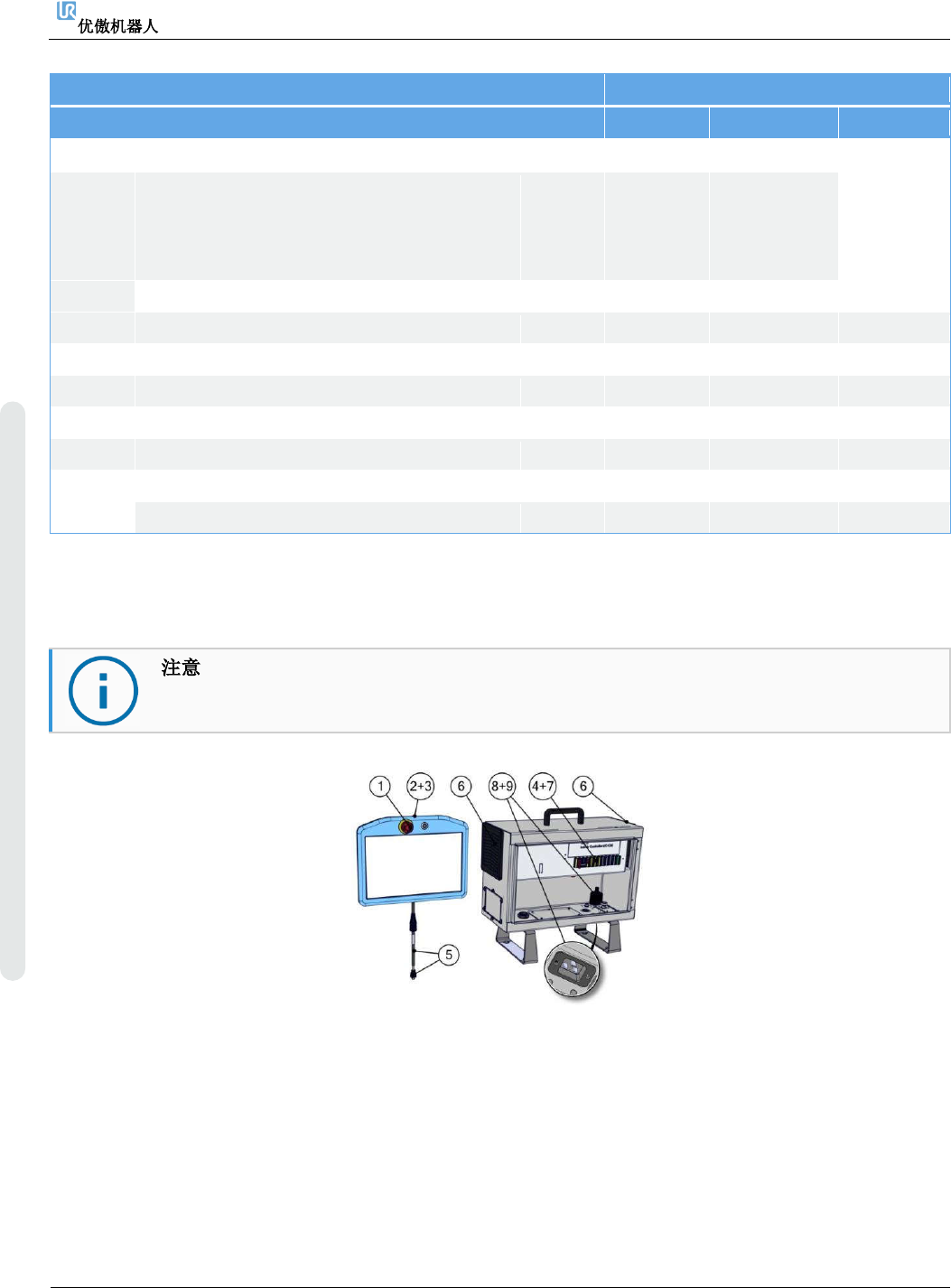
检查行动类型 时间表
每月一次 每半年一次 每年一次
1
检查示教器上的紧急停止按钮
F
✘
2 & 3
在标准示教器上:轻轻按下自由驱动按钮,
对其进行检查。
在3PE示教器上:轻轻按下3PE按钮,以检
查该按钮。
F
✘
检查反向驱动模式
F
✘
检查自由驱动模式
F
✘
4
检查安全输入和输出(如果已连接)
F
✘
5
检查示教器电缆和连接器
V
✘
6
检查并清洁控制箱上的空气过滤器
V
✘
7
检查控制箱中的端子
F
✘
8 & 9
检查控制箱的电气接地
1<Ω
F
✘
检查控制箱的主电源
F
✘
V = 目视检查 F = 功能检查
3.2.2. 功能和安全检查
机器人安全功能是重点,建议每月测试,以确保功能正确。
示教器上的紧急停止按钮:
1. 按下示教器上的紧急停止按钮。
2. 观察机器人停止及关节的电源关闭情况。
3. 再次给机器人通电。
3. 建议的检查活动
维修手册
13
维修手册
版权
© 2009–2020 优傲机器人公司版权所有。保留所有权利。
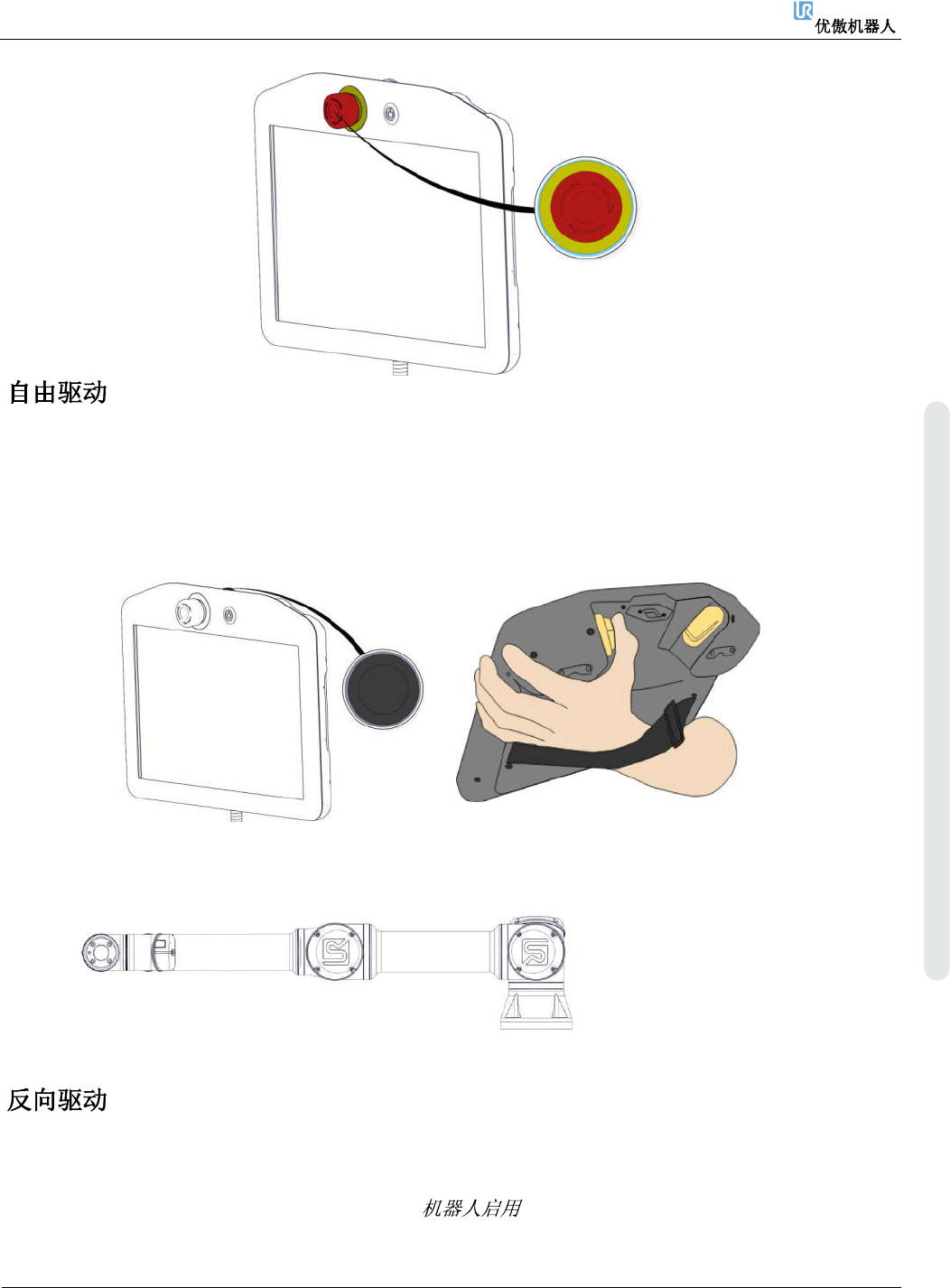
1. 根据工具规格,拆下附属装置或设置工具中心点(TCP)/有效负载/CoG。
2. 若要在自由驱动模式下移动机械臂:
⚫
按住在标准示教器上的“Freedrive(自由驱动)”按钮。
⚫
如果是 3PE 示教器,则要快速轻按,然后轻轻按住 3PE 按钮。
标准示教器 3PE 示教器
3. 将机器人拉/推至水平伸展位置并释放。
4. 确认机械臂可在没有支撑,且未按“Freedrive(自由驱动)”或 3PE 按钮的情况下保持在原位。
如果机械臂将要与某物发生碰撞,则可以使用“Backdrive(反向驱动)”功能将机械臂移动到安全位置,
然后再(重新)初始化。
1. 按下“ON(开)”接通电源。状态变更为

3. 建议的检查活动
维修手册
14
维修手册
版权
© 2009–2020 优傲机器人公司版权所有。保留所有权利。
2. 按住“Freedrive(自由驱动)”。状态更改为
标准示教器 3PE 示教器
3. 像在自由驱动模式下一样移动机器人。只要按下“Freedrive(自由驱动)”按钮,关节制动器就
会释放。
机械臂反向驱动模式下移动时会“很重”,所以需要移动关节。
您必须测试所有关节的
“
反向驱动
”
模式。
确认机器人安全设置是否符合机器人安装风险评估。