e-Series_Service_Manual_CN.pdf - 第24页
4. 维修和更换零件 维修手册 18 维修手册 版权 © 2009 – 20 2 0 优傲机器人公司版 权所有。保留 所有权利。 4.2.1. 无驱动力移动 发生紧急情况时 ,如果机器人电源不可用或不需 要时 ,在可使用强制反 向驱动,如 果不可用,也可以联 系您的优傲机器 人经销商。 进行强制反向驱 动时,必须用力推或拉动机械臂 ,以 移动关节。每个关节 制动器都有 一个摩擦离合器, 可以使机器人在 高强制扭矩下移动。 手动移动 机械…
4. 维修和更换零件
维修手册
17
维修手册
版权
© 2009–2020 优傲机器人公司版权所有。保留所有权利。
水准仪
或
双 机 械 臂 校 准 工 具 零 件 编 号 :
185500
控制柜钥匙
(双位钥匙)
SD 卡读卡器
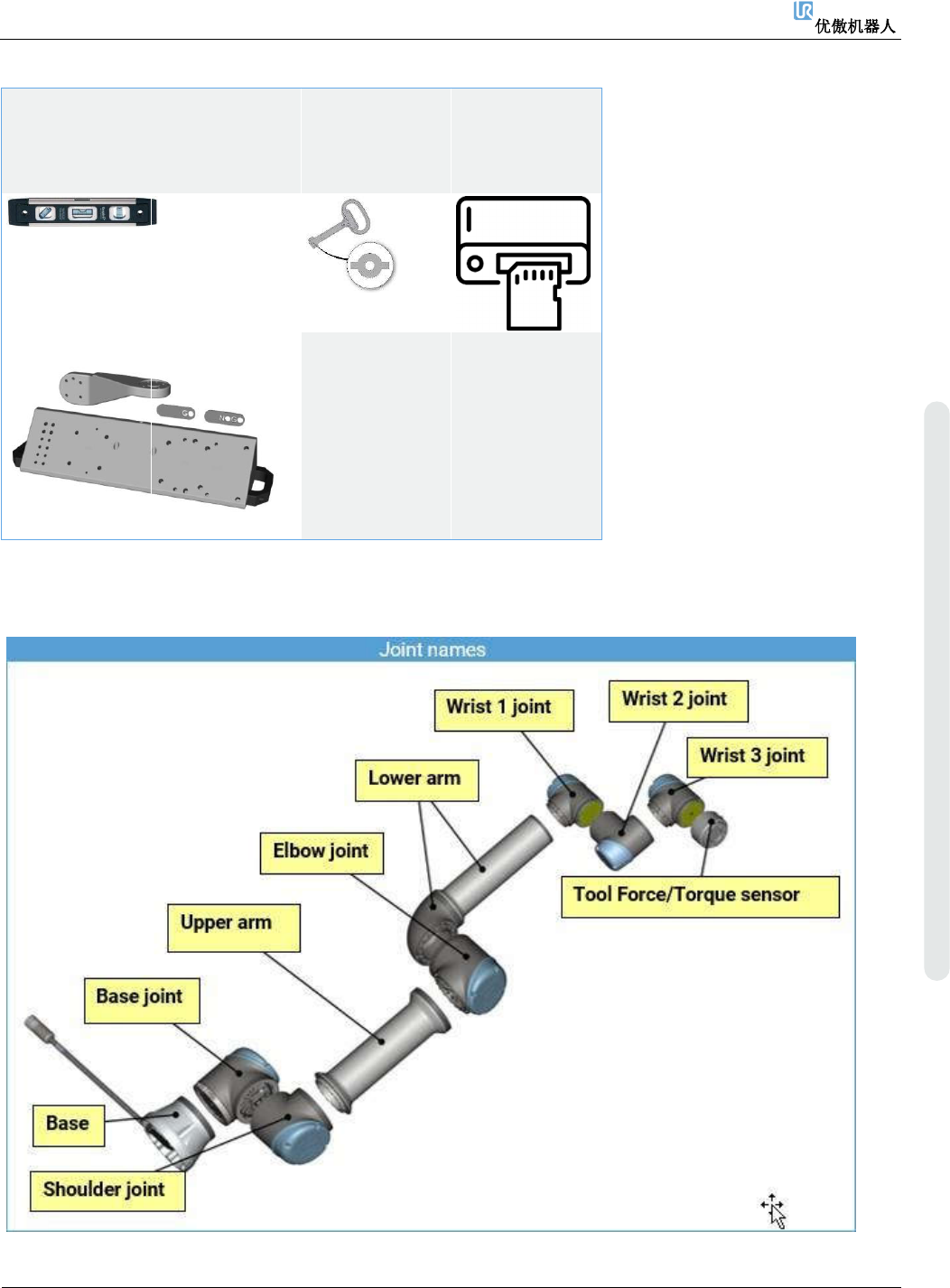
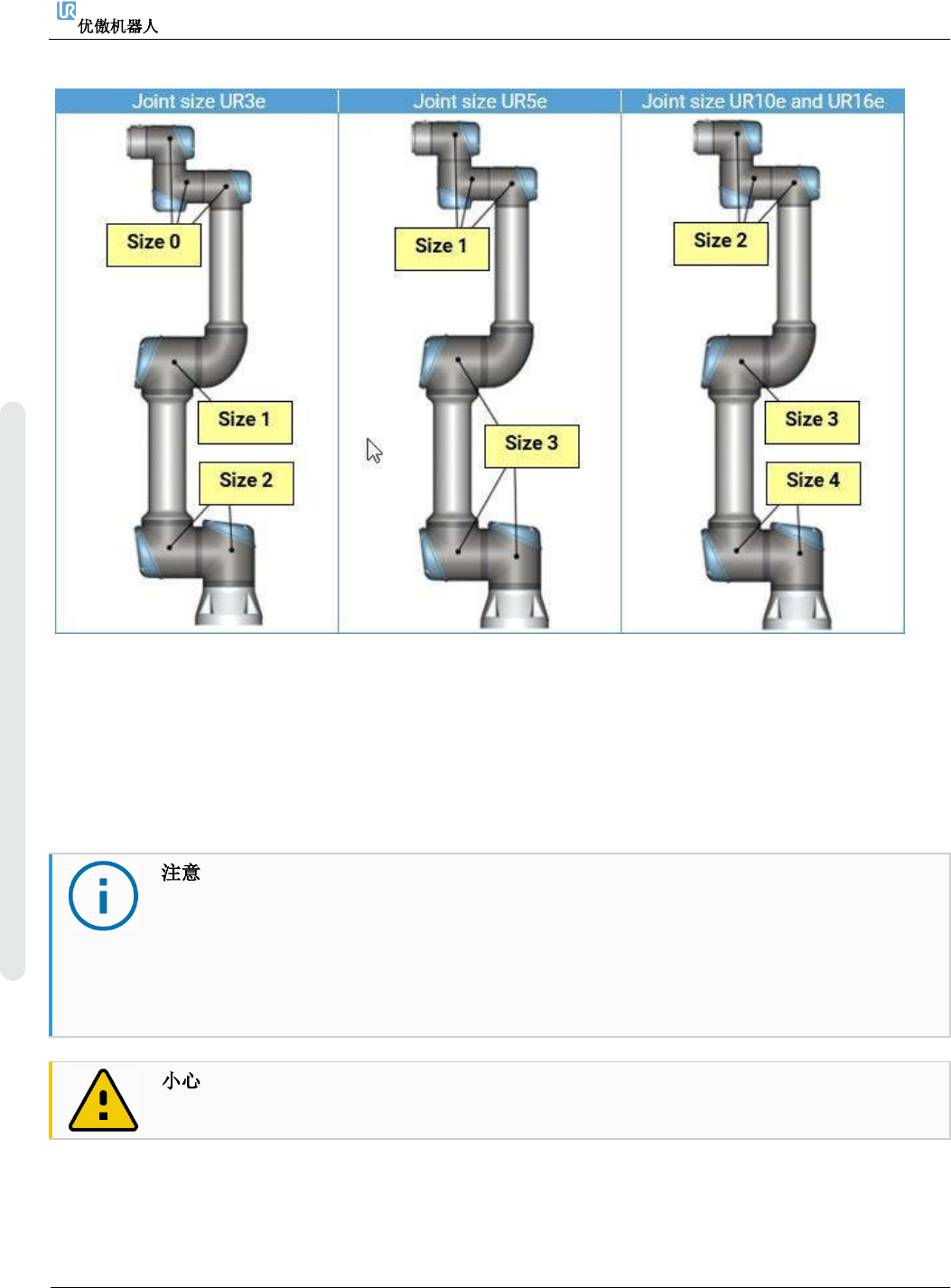
4.2. 机械臂
4. 维修和更换零件
维修手册
18
维修手册
版权
© 2009–2020 优傲机器人公司版权所有。保留所有权利。
4.2.1. 无驱动力移动
发生紧急情况时,如果机器人电源不可用或不需要时,在可使用强制反向驱动,如果不可用,也可以联
系您的优傲机器人经销商。
进行强制反向驱动时,必须用力推或拉动机械臂,以移动关节。每个关节制动器都有一个摩擦离合器,
可以使机器人在高强制扭矩下移动。
手动移动机械臂仅限于紧急状况和维修目的。
每个关节内部的制动器不是为手动释放而设计。如果未经过适当的培训就想这样做,则可能
损坏制动器和其他关节组件。这将使关节无法使用。
不要过度移动关节。
移动不能超过160度,确保机器人能找到原来的物理位置。
手动释放关节制动器可能会导致人员受伤或设备损坏。
4. 维修和更换零件
维修手册
19
维修手册
版权
© 2009–2020 优傲机器人公司版权所有。保留所有权利。
4.2.2. 分离关节与配对关节的通用指南
在更换控制箱内的任何组件之前,控制箱必须完全断电。按照完整的重启序列中的前3个步
骤进行操作
处理易受静电损坏零件时要小心谨慎。参见第2节:处理易受静电放电损坏的零件
1. 开始维修机器人前,请准备好必要的工具。
1. 带扭矩工具、防静电腕带等的维修套件。
2. 如果必须拆卸机械臂,则需要:
新的扁型环、耐磨环、M3 和 M4 螺纹丝锥工具(“滚压丝锥”或“成型丝锥”)、预涂膜螺钉或
乐泰胶。
继续维修作业之前,要完全阅读并理解本手册。
2. 将机器人移动到合适的拆卸位置。
3. 关闭控制箱,拔掉主电源。
4. 在必要时,将整个机械臂从工作单元上拆下,并放在坚固的表面上。
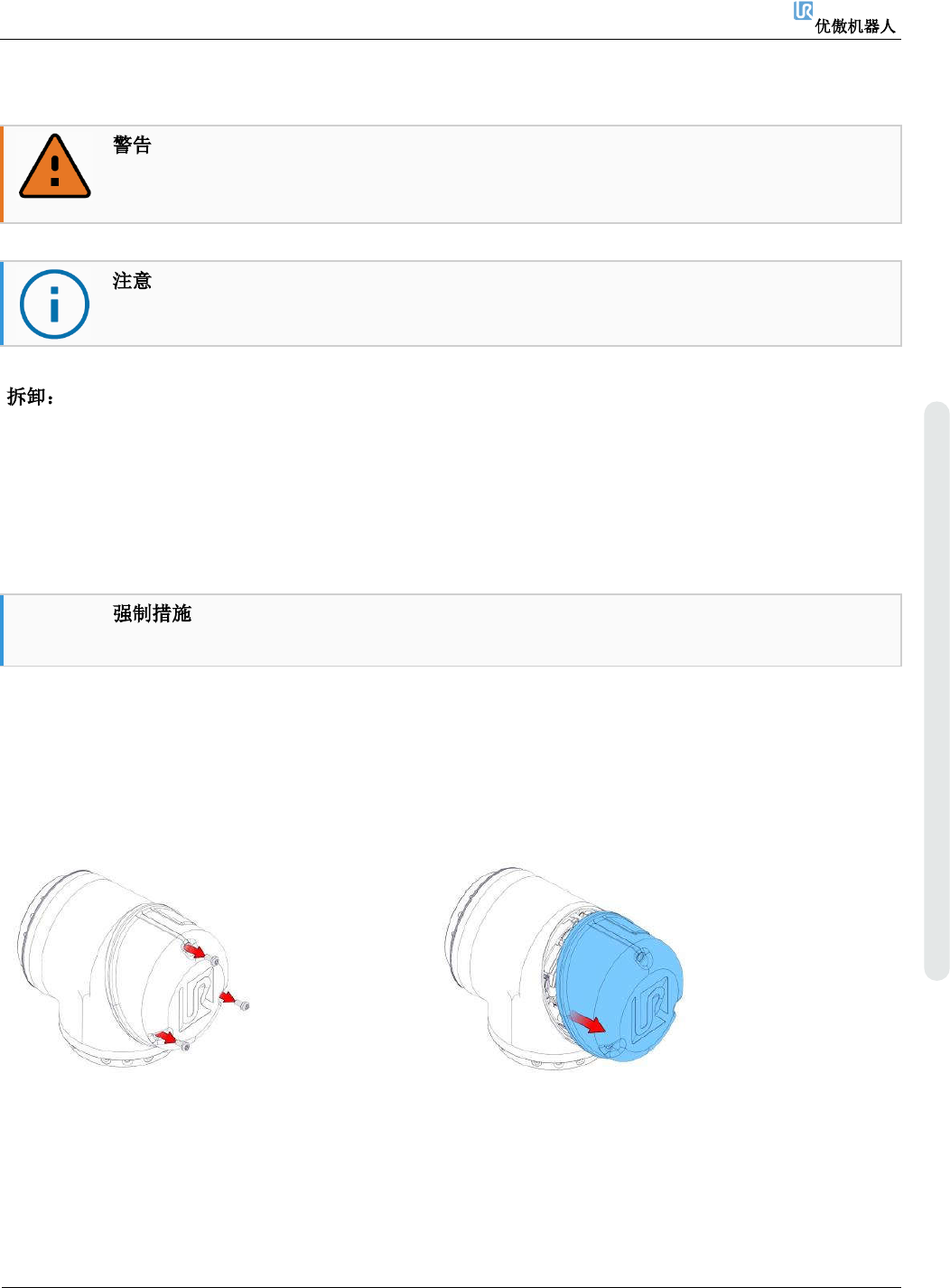
5. 拆除螺钉和蓝色盖子。
6. 在其中一个螺母柱上重新安装一颗螺钉,并将防静电腕带上的鳄鱼夹连接到螺钉上,具体如下
图所示。