e-Series_Service_Manual_CN.pdf - 第73页
6. 故障排除 维修手册 67 维修手册 版权 © 2009 – 20 2 0 优傲机器人公司版 权所有。保留 所有权利。 6. 故障排除 6.1. 出 于故障 排除目的添加 外部 设备 排除故障时,添 加鼠标、键盘或显示器可能会有 帮助。 支持大部分 USB 鼠 标和键盘。 将鼠标或键 盘插入其中一 个可 用的 USB 端口。 控制箱 可能需要重新启动 才能工作。 控制箱中有一个 微型显示器端口。连接显示器 时,它将显示与示教器相同的…
5. 软件
维修手册
66
维修手册
版权
© 2009–2020 优傲机器人公司版权所有。保留所有权利。
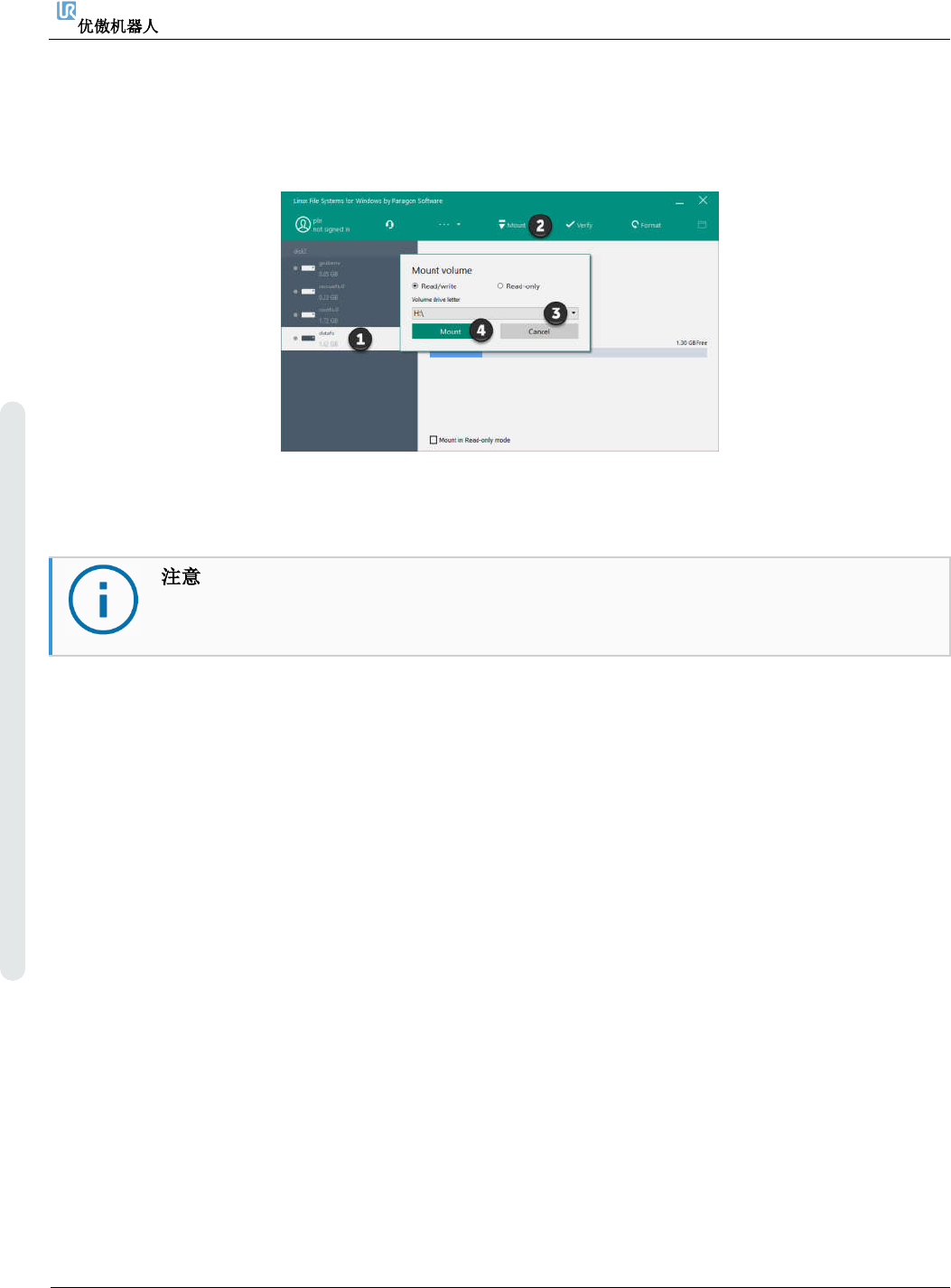
如果分区没有显示,则可能是它没有自动装入。
若要纠正此问题,请打开 Paragon 软件,选择分区(1),选择“安装”图标(2),选择卷驱动字母(3),
然后选择“安装”(4)。
5.4.4. 复制SD卡上的数据
导航至称为 datafs 的 SD 卡分区,并复制下面列出的文件/文件夹。
不要修改任何文件。您必须仅在需要时制作备份副本。
⚫
程序/[下列所有文件:.urp、.txt、.script、.installation、.variable、.old]
⚫
root/ur-serial
⚫
root/log_history.txt
⚫
root/log_history.bak [如有]
⚫
root/histogram.properties
⚫
root/flightreports [完整文件夹(如有)]
⚫
root/.urcontrol/calibration.conf
⚫
root/.urcontrol/calibration.log
⚫
root/.urcontrol/robot_calibration_summary.txt
6. 故障排除
维修手册
67
维修手册
版权
© 2009–2020 优傲机器人公司版权所有。保留所有权利。
6. 故障排除
6.1. 出于故障排除目的添加外部设备
排除故障时,添加鼠标、键盘或显示器可能会有帮助。
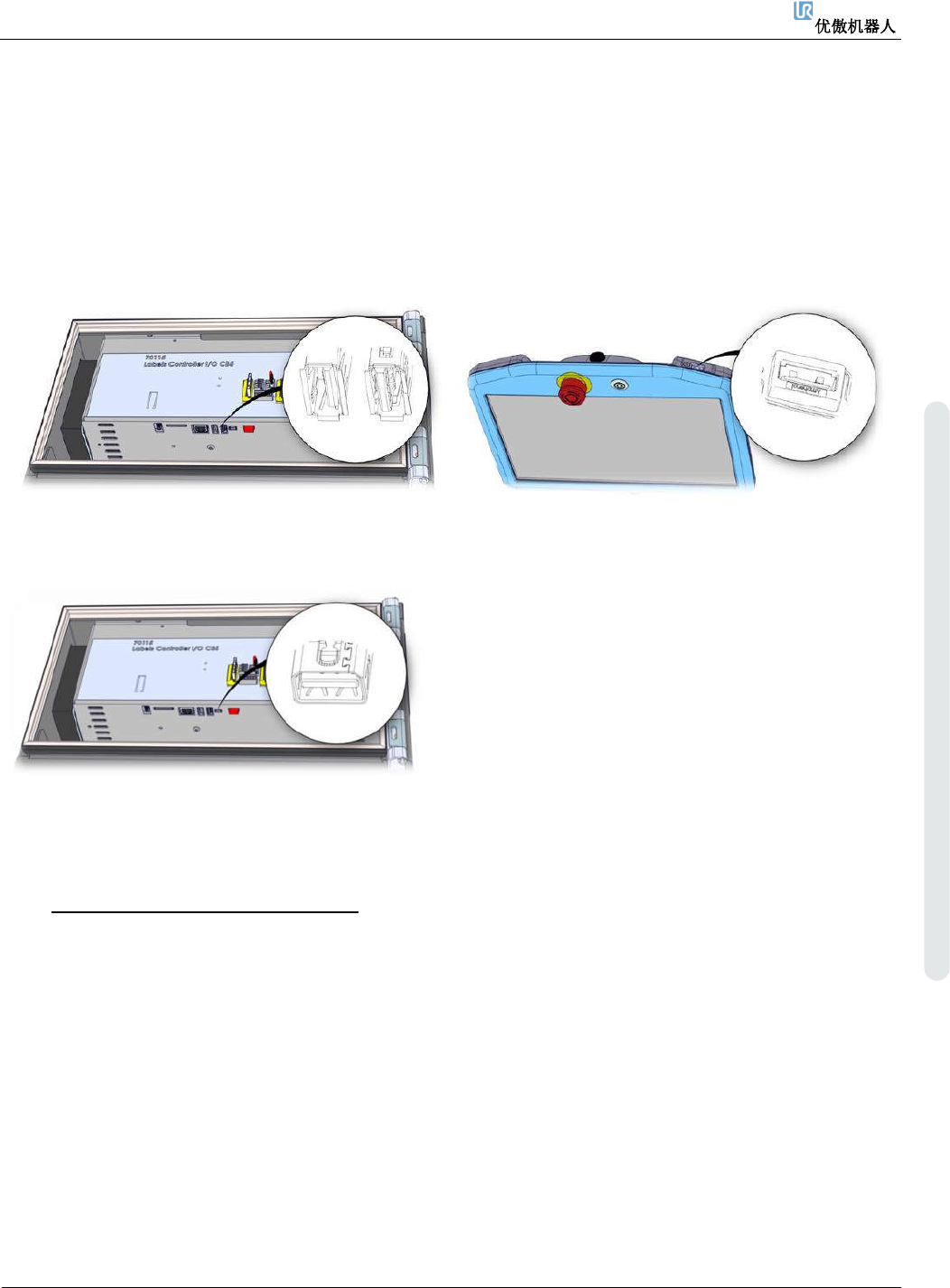
支持大部分 USB 鼠标和键盘。将鼠标或键盘插入其中一个可用的 USB 端口。控制箱可能需要重新启动
才能工作。
控制箱中有一个微型显示器端口。连接显示器时,它将显示与示教器相同的内容,并可与示教器同时连
接。控制箱可能需要重新启动才能工作。
6.2. 支持日志阅读器(SLR)
用优傲机器人支持日志阅读器(SLR)打开日志文件。
进入 www.universal-robots.com/support 下载支持日志阅读器
6. 故障排除
维修手册
68
维修手册
版权
© 2009–2020 优傲机器人公司版权所有。保留所有权利。
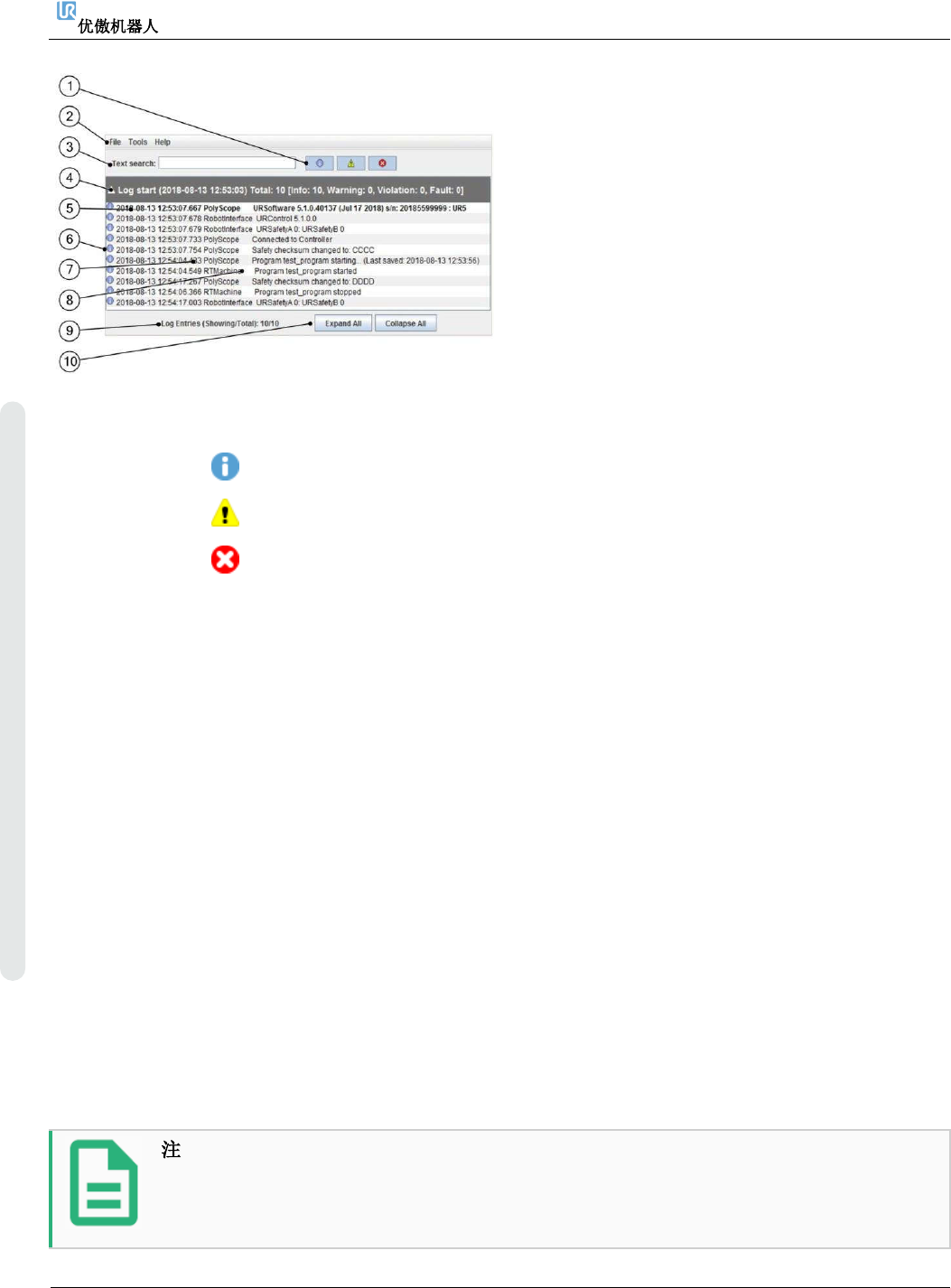
1. 筛选器;
选择要激活的筛选器
信息筛选器:
警告筛选器:
错误筛选器:
2. 工具栏;
加载日志文件,导出错误代码,更改语言
3. 文字搜索;
键入错误代码或文本
4. 日志启动信息栏*;
机器人每次通电时创建。
5. 突出显示的文本;
点击时,会给出更详细的信息。
6. PolyScope时间
7. 报告者;
信息是由“安全、PolyScope等”报告的。
8. 消息;
带Cxxxx的文字是指错误代码。
9. 日志条目;
显示与总计
10. 展开或折叠所有信息栏(第4项)
加载日志文件后,每个日志启动信息栏(4)都会被折叠,只有每个日志启动的摘要可见。