TR7700_SII_Software_ch_v4-6.pdf - 第463页
Test Research Inc. TR 7700 S II User Guid e – Softwar e 4 49 29. 儲存影像 :將目前這張 FOV 影像儲存到與本程式所儲存的資料夾下,檔案以日時 分秒命名。 30. 讀取影像 :可以瀏覽路徑並載入其他已存在的 FOV 影像。此影像載入後僅供檢視 用,並不會儲存在程式當中。 31. New Component :在 FOV 中增加一個新的元件。點選後會出現以下視窗,輸入 相關…
Test Research Inc.
448 TR7700 SII User Guide–Software
Test Research Inc.
TR7700 SII User Guide–Software 449
29. 儲存影像:將目前這張 FOV 影像儲存到與本程式所儲存的資料夾下,檔案以日時
分秒命名。
30. 讀取影像:可以瀏覽路徑並載入其他已存在的 FOV 影像。此影像載入後僅供檢視
用,並不會儲存在程式當中。
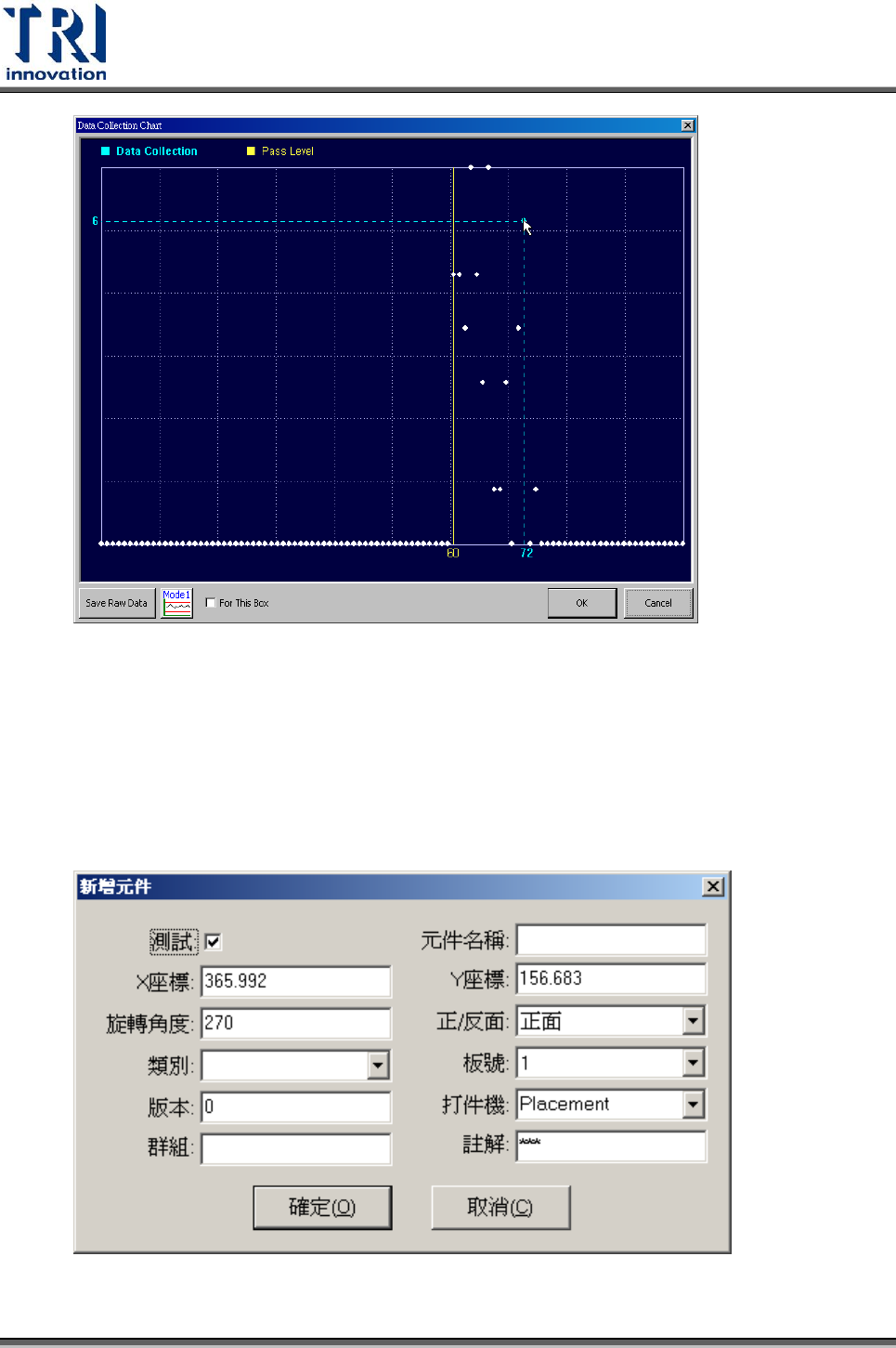
31. New Component:在 FOV 中增加一個新的元件。點選後會出現以下視窗,輸入
相關資訊後即會產生新的元件。
Test Research Inc.
450 TR7700 SII User Guide–Software
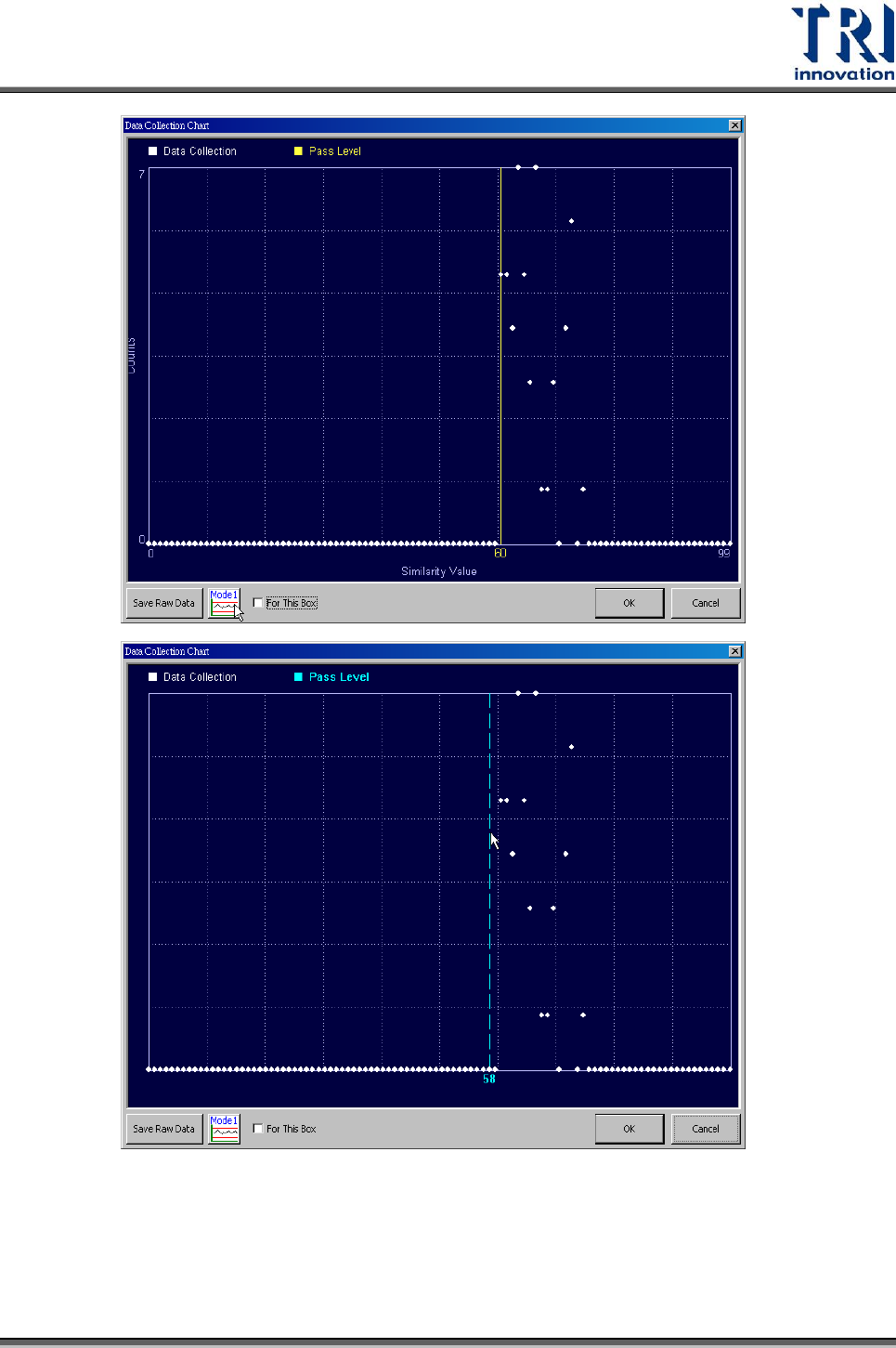
32. 重檢測元件:針對選取的元件,用收集的影像進行檢測,檢測完後輸出報表,作
為人員微調參數的依據。詳細使用方法請參閱 3.7.39 品質確認。
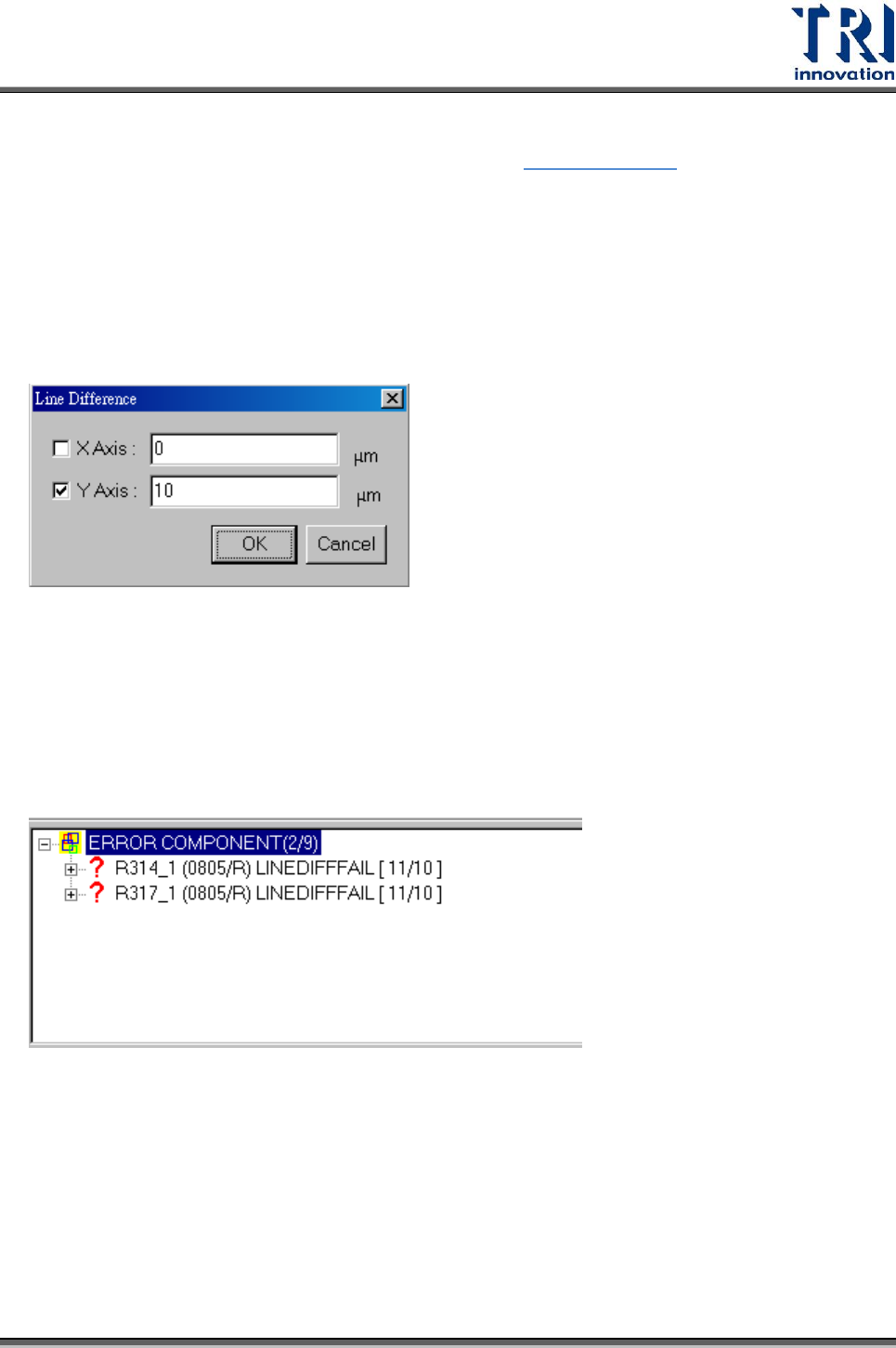
33. Line Difference:此功能的用途在於測試多個元件的共線性。在圖中先選擇其中
一顆元件的[Lead]或[Missing]後按右鍵,選擇[Line Difference]。點選後出現對話
框如下所示。勾選要加入平整度判斷的軸向,並輸入該群組所能容忍最大與最小
偏移量的容許值(Pass Level)。系統會自動根據元件的 CAD 座標,將同一個板子中,
與選定元件的 X 或 Y 座標值相同的設為同一群組。檢測時會找出此群組中最大跟
最小的偏移量的差,若超過設定的容許值,則結果為 FAIL,反之為 PASS。
舉例來說,圖中選定該元件的 Lead 框後,勾選 Y 方向且容許值設為 10,系統會將同
一個板子上,CAD 的 Y 值與此元件相同所有元件的 Lead 框設為同一群組,而此群組
的 Y 方向偏移的變異量能夠容忍的最大值是 10 um。
檢測結果如果是 FAIL,會在不良列表中顯示出[LINEDIFFFAIL],而後面中括號中的
[11/10]代表設定該群組的容許值為 10,檢測結果變異量為 11,所以系統判定為
FAIL。