00191803-01.pdf - 第189页
Manuel d’utilisation SIPLACE S-23 HM 6 Fonctions de vision Version du logiciel SR.406.xx Edition 02/00 FR 6.2 Système Vision des PCB 189 6.2 Système V ision des PCB Le syst ème Vision d es PCB s aisit la positio n exacte…
6 Fonctions de vision Manuel d’utilisation SIPLACE S-23 HM
6.1 Systèmes de vision de l'automate Version du logiciel SR.406.xx Edition 02/00 FR
188
6
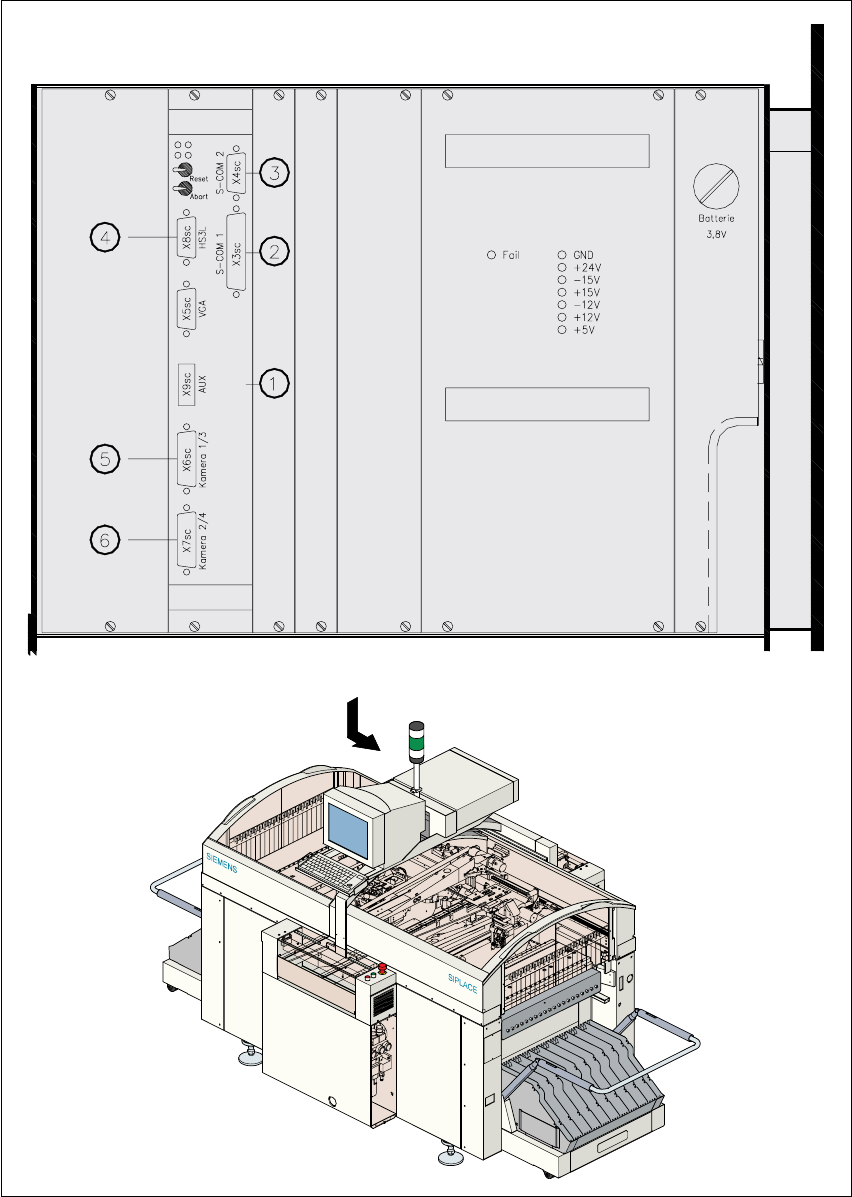
Fig. 6.1 - 4 Unité d’analyse Vision
6

Manuel d’utilisation SIPLACE S-23 HM 6 Fonctions de vision
Version du logiciel SR.406.xx Edition 02/00 FR 6.2 Système Vision des PCB
189
6.2 Système Vision des PCB
Le système Vision des PCB saisit la position exacte du PCB en mesurant ses marques et déter-
mine son décalage en X et Y, son angle de rotation par rapport à son sens de convoyage ainsi
que son cisaillement. Les marques de rebut (points d’encre) sont également saisies et analysées
par le système Vision des PCB. 6
6.2.1 Description du système
Le système Vision des PCB se compose du système de reconnaissance optique du positionne-
ment des PCB et d’une unité d’analyse Vision 6
Système de reconnaissance optique du positionnement des PCB 6
Chaque portique est équipé d’un système individuel de reconnaissance optique du positionne-
ment des PCB (voir fig. 6.1 - 3
, page 186). 6
Unité d’analyse Vision 6
Pour chaque automate, une unité d'analyse de la vision est insérée dans le rack de commande
en vue de la reconnaissance de la position des circuits imprimés et des composants
(voir ill. 6.1 - 4
, page 188). 6
Une caméra CCD (caméra SONY XC75), équipée d’une optique de reproduction et d’éclairage,
constitue le système de reconnaissance optique du positionnement des PCB. Le champ de vision
du module PCB est de 5,7 mm x 5,7 mm. Il est possible de programmer librement la position et
la taille d’un champ de recherche au sein des dimensions des champs de vision. 6
L’unité d’analyse Vision (MVS) est un système à carte unique suivant la norme VME. Le matériel
se compose 6
– d’une carte-mère MVS avec processeur vidéo et ports d’interface et
– d’une interface MVS, à laquelle peuvent être branchées au moins quatre caméras CCD.
Carte-mère MVS avec processeur vidéo et ports d’interface 6
Les deux connecteurs à fiches du bus VME sont situés sur la face arrière du module VME. 6
Les fiches, auxquelles peuvent être branchés 6
– l’écran (mode VGA, fiche à 15 pôles SUBD)
– l’interface grande vitesse (HS
3
L), fiche à 9 pôles SUBD
– au moins 4 entrées de caméra (2 fiches à 15 pôles SUBD)
6 Fonctions de vision Manuel d’utilisation SIPLACE S-23 HM
6.2 Système Vision des PCB Version du logiciel SR.406.xx Edition 02/00 FR
190
– deux interfaces sérielles (RS232 pour COM1 à l’aide d’une fiche à 25 pôles SUBD et pour
COM2 à l’aide d’une fiche à 9 pôles SUBD)
– les signaux de déclenchement (Trigger) et signaux flash (fiche plate à 10 pôles)
ainsi que des DEL d’affichage d’état 6
– de la CPU (CFG)
– du processeur vidéo (ACA)
– de l’entrée de la caméra (BCA)
– de l’affichage écran (DISP)
sont agencées sur le panneau avant du module VME. 6
Les commutateurs de "REINITIALISATION" et "INTERRUPTION" sont placés sous les DEL d’af-
fichage d’état. 6
6.2.2 Caractéristiques techniques
Caméra: SONY XC75 6
Nombre des points d’image: caméra 768 (H) x 494 (V), image 640 (H) x 484 (V) 6
Champ de vision: 5,7 mm x 5,7 mm 6
Méthode d’éclairage: par réflexion (activée au cours de la mesure) 6
Traitement des images: suivant le principe de corrélation, système d’analyse des
demi-teintes 6
Ecran: moniteur RGB (mode VGA-Modus) 640 x 484 pixels du calcu-
lateur de station 6
Marques: mémoire en bibliothèque d’au moins 255 définitions de marque 6
6.2.3 Description fonctionnelle
Le système Vision des PCB définit la position, l’angle de rotation et le cisaillement du PCB avant
de le reporter, en fonction des positions de ses marques. Les écarts des valeurs théoriques sont
inclus aux positions de report des composants sous la forme de valeurs de correction. 6
Au moins 2 marques doivent être apposées sur un PCB, afin que le système puisse détecter les
écarts de la position et de l’angle de rotation du PCB. Des informations supplémentaires sur la
déformation et le déport du PCB et de son layout sont obtenues en y apposant 3 marques. 6
6.2.4 Déroulement opérationnel
Une marque doit tout d’abord être soumise à un ’apprentissage’ avant de pouvoir être utilisée pour
la reconnaissance du positionnement du PCB, c-à-d. que les paramètres afférents à la structure
des marques du modèle doivent être enregistrés dans le système Vision des PCB. 6