00191803-01.pdf - 第47页
Manuel d’utilisation SIPLACE S-23 HM 1 Introduction, caractéristiques techniques Version du logiciel SR.406.xx Edition 02/00 FR 1.13 Vue d’ensemble du sous-groupe - Tête revolver 47 1.13 V ue d ’ensemble du sous-groupe -…
1 Introduction, caractéristiques techniques Manuel d’utilisation SIPLACE S-23 HM
1.12 Vue d’ensemble du sous-groupe - Portiques Version du logiciel SR.406.xx Edition 02/00 FR
46
1.12.3 Caractéristiques techniques de l'axe X
1.12.4 Structure de l'axeY
L’axe Y se compose pour l’essentiel des blocs principaux suivants : T :2
– servomoteur à courant alternatif de l'axe Y
– courroie dentée de l'axe Y
– système de guidage de l'axe Y
– système de mesure de l'axe Y
T :2
Chaque axe Y est entraîné par un servomoteur à courant alternatif. Un montage anticrash limite
les trajectoires de déplacement des portiques les uns contre les autres. T :2
1.12.5 Caractéristiques techniques de l'axe Y
Commande Servomoteur courant alternatif / courroie dentée
Vitesse max. 2,5 m/sec.
Trajectoire de déplacement 620 mm
Système de mesure de la trajectoire Echelle métallique linéaire
Longueur de l'échelle 646 mm
Résolution 2,5 µm
Commande Servomoteur à courant alternatif / courroie dentée
Vitesse max. 2,5 m/sec.
Trajectoire de déplacement des portiques 910 mm
Système de mesure de la trajectoire Echelles métalliques linéaires
Longueur de l'échelle 970 mm
Résolution 2,5 µm
Manuel d’utilisation SIPLACE S-23 HM 1 Introduction, caractéristiques techniques
Version du logiciel SR.406.xx Edition 02/00 FR 1.13 Vue d’ensemble du sous-groupe - Tête revolver
47
1.13 Vue d’ensemble du sous-groupe - Tête revolver
1.13.1 Structure de la tête revolver/DLM1 à 12 segments
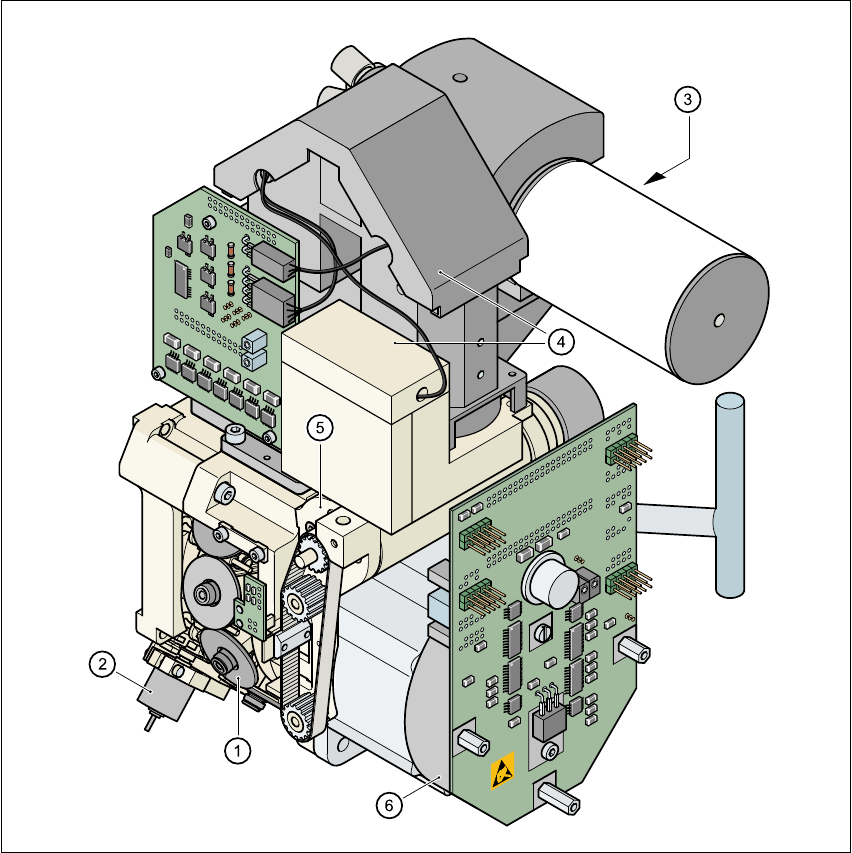
Fig. 1.13 - 1 Structure de la tête revolver/DLM1 à 12 segments
Tous les composants sont reportés suivant la même cadence. Avant que le composant soit re-
porté, il est mesuré optoélectroniquement avec le module de vision. T :6
(1) Barillet à 12 fourreaux (2) Moteur, commande de réglage de la valve " Rejet "
(3) Station de pivotement (4) Module de vision des compos.
(5) Commande de l'axe Z (6) Moteur du barillet
1 Introduction, caractéristiques techniques Manuel d’utilisation SIPLACE S-23 HM
1.13 Vue d’ensemble du sous-groupe - Tête revolver Version du logiciel SR.406.xx Edition 02/00 FR
48
– La caméra de vision des compos. établit un tracé du composant relevé.
– Par ailleurs, la position précise du composant est déterminée.
– La forme du boîtier du composant relevé est comparée avec la forme du boîtier programmée,
afin d'identifier le composant. Les composants non identifiés sont rejetés.
– La station de pivotement fait pivoter le composant dans la position de report exigée.
1.13.2 Description de la tête revolver à 12 segments
– La tête revolver à 12 segments travaille suivant leprincipe Sélection & Placement, dans le sens
que les composants sont recueillis à l'aide d'un vide des pipettes et déposés, après un cycle
de prélèvement complet, à l'aide d'air de soufflage, doucement et dans leur position précise,
sur le circuit imprimé. En même temps, le vide dans les pipettes est vérifié plusieurs fois afin
de constater si les composants ont été aussi prélevés et déposés correctement.
– Le mode " adaptatif " de l'arrêt du détecteur de l'axe-Z compense les déformations-des CIs en
déposant les composants.
– Les composants défectueux sont rejetés, leur report étant repris dans un passage de répara-
tion.
1.13.3 Caractéristiques techniques de la tête revolver à 12 segments
Spectre des composants 0402 à 18,7mm x 18,7mm, y compris BGA, µBGA,
Flip Chip, TSOP, QFP, PLCC, SO à SO32, DRAM
Hauteur max. 6 mm
Grille max. des petites pattes 0,5 mm
Dimensions min. 0,5 mm x 1,0 mm
Dimensions max. 18,7 mm x 18,7 mm
Poids max. 2 g
Course max. de l'axe Z 16 mm
Force de pose programmable 2,4 à 5,0 N
Types de pipettes 9xx
Précision angulaire ± 0,525° / 3 σ, ± 0,70° / 4 σ, ± 1,05° / 6 σ
Précision du report ± 67,5 µm / 3 σ, ± 90 µm / 4 σ, ± 135 µm / 6 σ