00191803-01.pdf - 第197页
Manuel d’utilisation SIPLACE S-23 HM 6 Fonctions de vision Version du logiciel SR.406.xx Edition 02/00 FR 6.2 Système Vision des PCB 197 – Nombre des marques Lors de l’uti lisation de substrats en cér amique et de PCB de…
6 Fonctions de vision Manuel d’utilisation SIPLACE S-23 HM
6.2 Système Vision des PCB Version du logiciel SR.406.xx Edition 02/00 FR
196
–Epaisseur (d)
Quant aux marques en étain, veiller à ce que leur convexité ne soit pas supérieure à 1/10 de
la largeur de leur structure. Le cas échéant, il se pourrait que la marque ne soit pas éclairée
uniformément, lorsque cette cote de convexité est dépassée. Il en résulterait des variations de
réflexion et des réflexions parasites. La reconnaissance des marques n’est alors plus garantie.
6
Cotes recommandées des marques 6
Valorisation de la géométrie des marques 6
En ce qui concerne les structures en étain et les marques recélant une stabilité élevée de cotes (fai-
bles écarts de gravure), il est permit de considérer les cercles et les carrés fermés comme des géo-
métries de marque très favorables (rapport élevé d’épaisseur des marques - épaisseur de
brassage!). Le cercle fermé est recommandé au lieu du carré, lorsque la stabilité des cotes diminue.6
Il est recommandé d’utiliser du cuivre nu pour les marques représentées par des croix simples et
des doubles croix, pour autant que l’oxydation ne soit pas trop avancée. 6
– Surface des marques
Veiller à ce que la surface des marques soit plane et faiblement oxydée. Eviter d’enduire les
marques d’une couche de vernis épargne, ce qui affaiblirait le contraste par rapport au fond et
occasionnerait des réflexions parasites. Des effets similaires sont engendrés également, lors-
que les marques sont en étain.
– Contraste des marques
Pour reconnaître dûment les marques, choisir un grand contraste de luminosité entre marque
et substrat, c-à-d. marques claires sur substrat foncé et l’inverse. Apposer, par ex., des mar-
ques foncées sur des substrats en cuivre et étain. Quant aux substrats en céramique ayant
une surface claire et des pouvoirs de réflexion désavantageux, il est recommandé d’y appli-
quer un matériau résistif, permettant d’améliorer le contraste.
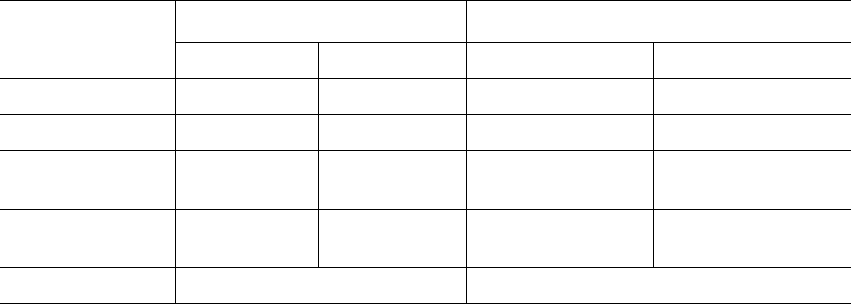
Type de marque
Croix simple Double croix
Plage Plage idéale Plage Plage idéale
Longueur (l) 0,9 mm (min) 2,0 mm 1,8 mm 2,75 mm
Largeur (b) 0,9 mm (min 2,0 mm 1,8 mm 2,75 mm
Epaisseur des
traits (s) 0,3 - 1,4 mm 0,5 mm 0,3 - 0,75 mm 0,5 mm
Distance entre les
traits (a) — — 0,5 mm (mini) 0,75 mm
Epaisseur (d) < 1/10 de la largeur de la structure < 1/10 de la largeur de la structure

Manuel d’utilisation SIPLACE S-23 HM 6 Fonctions de vision
Version du logiciel SR.406.xx Edition 02/00 FR 6.2 Système Vision des PCB
197
– Nombre des marques
Lors de l’utilisation de substrats en céramique et de PCB de petite taille, il suffit généralement
d’y apposer deux marques. Quant aux PCB de taille plus grande, il est recommandé de définir
trois marques. Chaque marque peut avoir une structure différente. La méthode de reconnais-
sance est cependant simplifiée, lorsque chaque marque recèle la même structure.
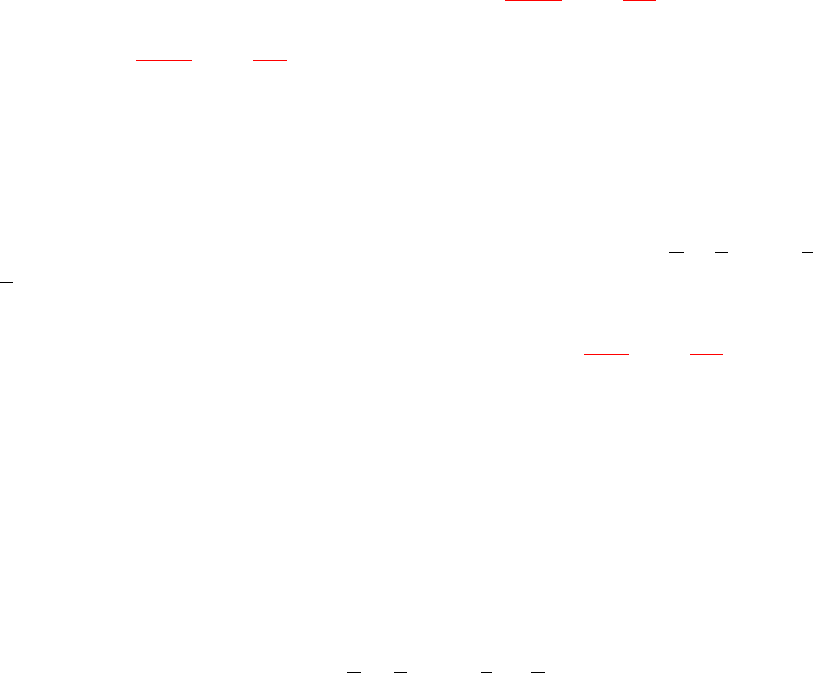
– Correction d’un PCB doté de deux marques
en X
en Y
écart de rotation du PCB
– Correction en X d’un PCB doté de trois marques: de façon idéale, les lignes droites passent
à travers le centre de deux marques, parallèlement à l’axe X et Y
en Y
écart de rotation du PCB
Cisaillement
déport du PCB en X
déport du PCB en Y
NOTE 6
N’aligner en aucun cas 3 marques. 6
– Distance entre les marques
Les marques peuvent être réparties à volonté sur le PCB. Il est recommandé d’apposer les
marques de telle façon que leur distance réciproque sur les deux axes soit aussi grande que
possible. Plus les marques sont éloignées, plus précise est la détermination optique de la po-
sition et de l’angle du PCB.
6 Fonctions de vision Manuel d’utilisation SIPLACE S-23 HM
6.3 Système de vision des composants Version du logiciel SR.406.xx Edition 02/00 FR
198
6.3 Système de vision des composants
Le système de vision des compos. saisit la position exacte d'un composant en déterminant: d'une
part le déport du centre du composant par rapport à l'axe de symétrie de la pipette, d'autre part:
le déport de l'angle de rotation par rapport à la position de rotation relative de la pipette. L'analyse
de l'état de la configuration des petites pattes dans les sens X et Y est également possible. Le
système de vision des compos. se compose du système optique, en vue de la reconnaissance de
la position des compos., et de l'unité d'analyse de la vision. 6
6.3.1 Système de vision des compos sur la tête revolver à 12 segments
6.3.1.1 Description du système
La tête de report revolver à 12 segments possède son propre système de reconnaissance de la
position des compos. dans la station du barillet 7 (voir ill. 6.1 - 2
, page 185). L'unité d'analyse,
destinée à reconnaître la position des PCBs et des compos., est insérée dans le rack de com-
mande (voir ill. 6.1 - 4
, page 188). 6
Une caméra CCD, avec miroir de déviation, optique de reproduction et système d'éclairage par
DELs, constitue le système optique de reconnaissance de la position des compos. Le champ vi-
suel utilisable de la caméra CCD (caméra SONY XC75) est de 24 mm x 24 mm. Pour reconnaître
ou pour éprouver les petites pattes, le compos. est illuminé par incidence de manière uniforme
par les rangées de DELs et représenté distinctement, grâce à l'optique, sur la puce CCD. Des mé-
thodes ayant trait au traitement numérique de l'image, soit le procédé HALE (H
igh Accuracy Lead
E
xtraction = extraction principale de haute précision) permettent de déterminer les paramètres de
la position, de l'angle de torsion et de l'état des petites pattes. 6
L'unité d'analyse de la vision (MVS) a déjà été décrite au chapitre 6.1.3
, page 187, puisqu'elle
prend en charge les deux fonctions de l'analyse des PCBs et des compos. 6
6.3.1.2 Caractéristiques techniques
Type de caméra: SONY XC75
Nombre de pixels: 484 x 484
Champ visuel: 24mm x 24mm
Méthode d'éclairage: procédé par incidence (lumière rouge),
3 niveaux de DELs
Traitement de l'image: procédé des valeurs de gris HALE
(H
igh Accuracy Lead Extraction = extraction principale
de grande précision)
Ecran: moniteur RVB (mode VGA) 640 x 484 pixels
Tailles des compos.: 0,5mm x 0,5mm ... 18,7mm x 18,7mm