2OM-1088-002.pdf - 第178页
Tg0699-PM-D2 0207-001 Chapter 1 4-30 4.1 "Machine Offset" T ab P .C.B. T ransfer Height : Enter an offset value in the text box, based on the specified distance in the Z direction between the upper surface of t…
Tg0699-PM-D2
0207-001 Chapter 1 4-29
4.1 "Machine Offset" Tab
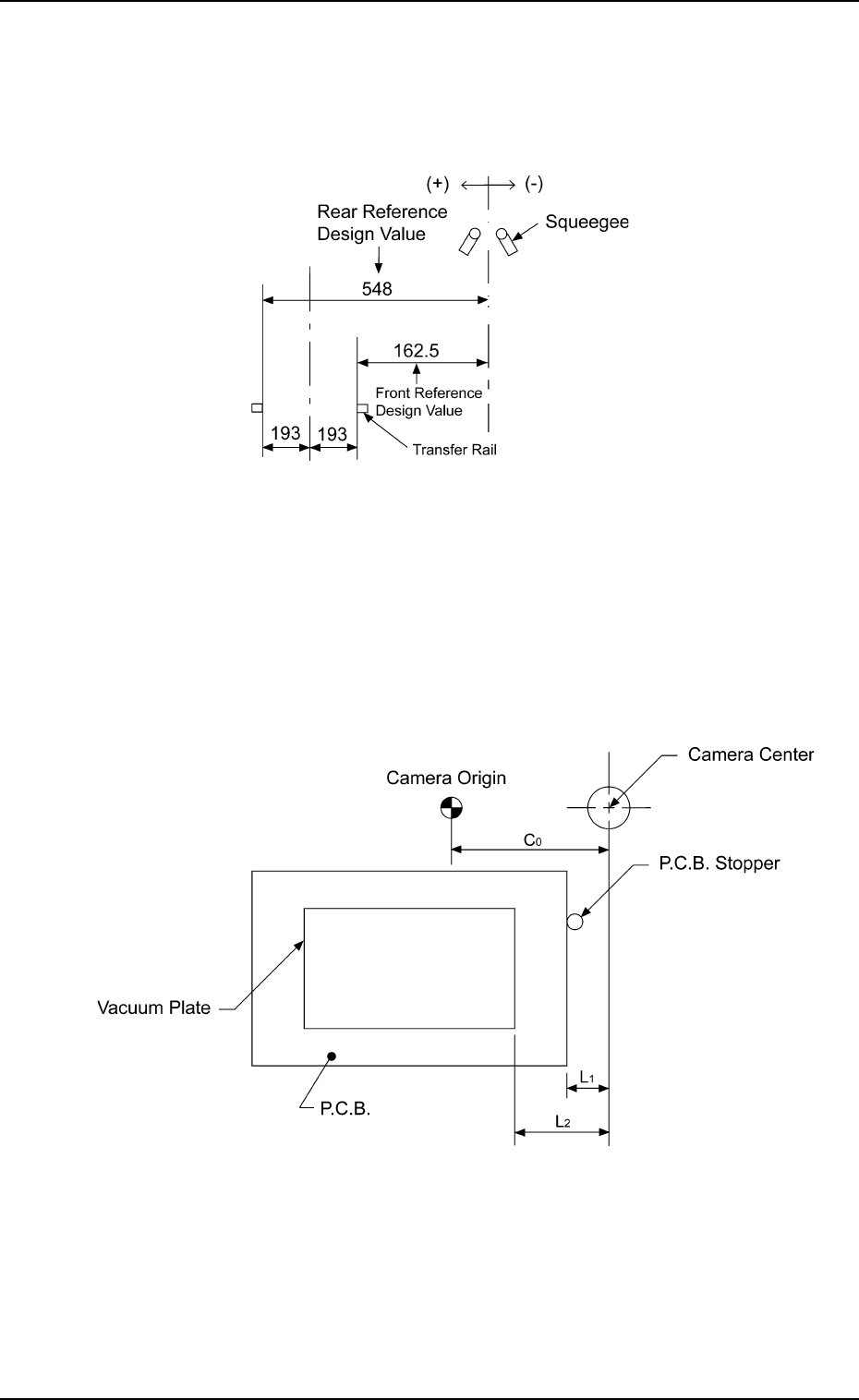
Squeegee-Screen : Enter an offset value in the text box,
based on the specified distance in the Y
direction between the squeegee origin and
the screen center.
Fig. 3D21
Vacuum Plate : Enter an offset value in the text box,
based on the specified distance in the X
direction between the center of the P.E.C.
recognition camera and the end plane of
the P.C.B. vacuum jig.
Fig. 3D22
Tg0699-PM-D2
0207-001 Chapter 1 4-30
4.1 "Machine Offset" Tab
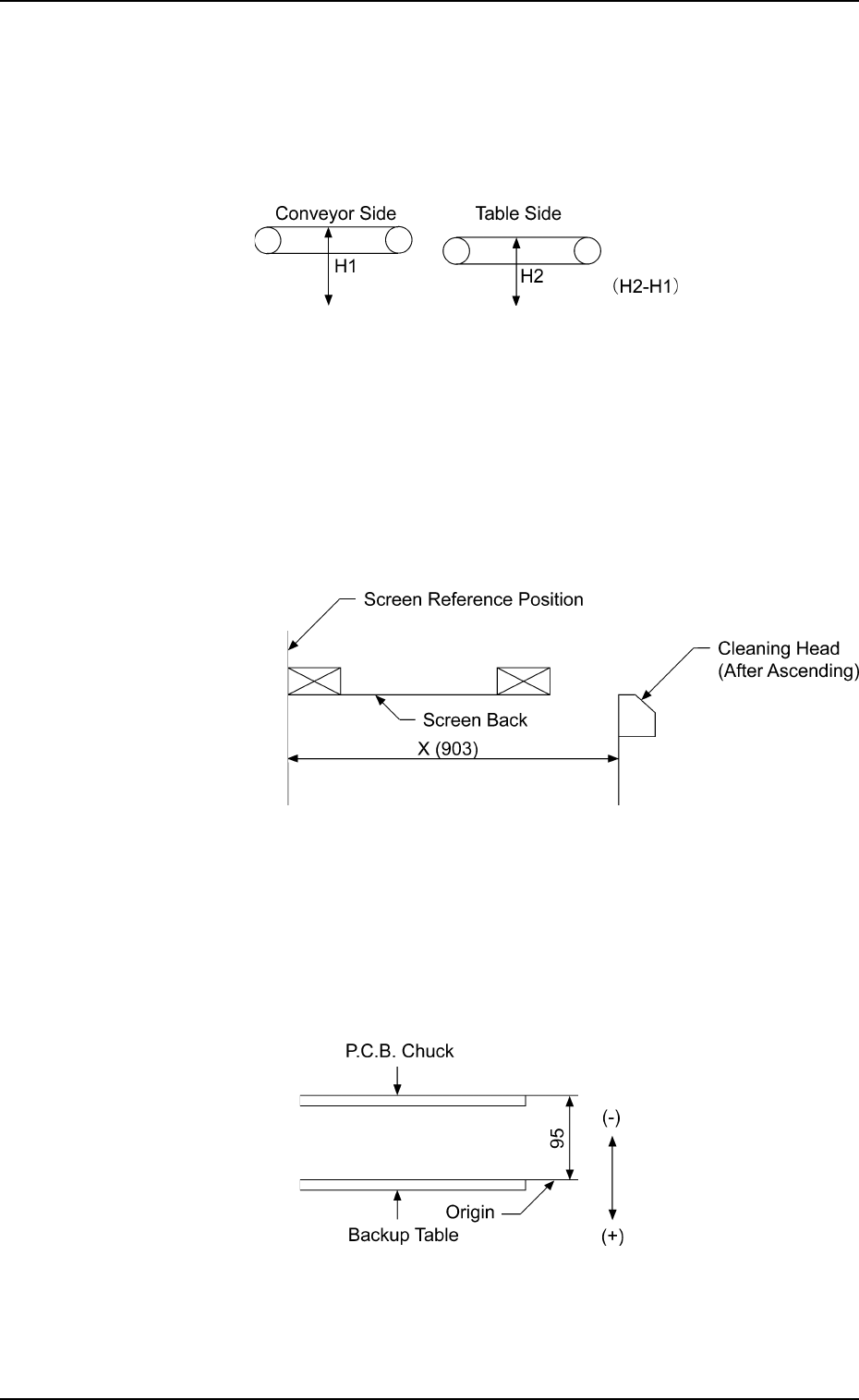
P.C.B. Transfer Height : Enter an offset value in the text
box, based on the specified distance
in the Z direction between the upper
surface of the table chute at its origin
and the lower surface of the P.C.B.
Fig. 3D23
Cleaning : Enter an offset value in the text box,
based on the specified distance in the
X direction between the cleaning head
at its cleaning position and the screen
center.
Fig. 3D24
P.C.B. Chuck Height : Enter an offset value in the text box,
based on the specified distance in the
Z direction between the P.C.B. backup
table at its origin and the lower surface
of the P.C.B.
Fig. 3D25
Tg0699-PM-D2
0207-001 Chapter 1 4-31
4.1 "Machine Offset" Tab
Screen Y Print Pos. : Input the offset value of the screen Y-
axis against the distance in Y direction
on the table reference surface.
*2 Conveyor Wd. Offset
Enter dimensions (widths) in the Y direction of the L/R convey-
ors and the table chute through which a P.C.B. passes. The
entered values are used to change the specified ones in the
pattern program.
L Conveyor Wd. : Enter an offset value (the dimension
representing the width through which
a P.C.B. on the L conveyor passes)
based on the specified one in the
pattern program.
R Conveyor Wd. : Enter an offset value (the dimension
representing the width through which
a P.C.B. on the R conveyor passes)
based on the specified one in the
pattern program.
Table Chute Wd. : Enter an offset value (the dimension
representing the width through which
a P.C.B. on the table chute passes)
based on the specified one in the
pattern program.
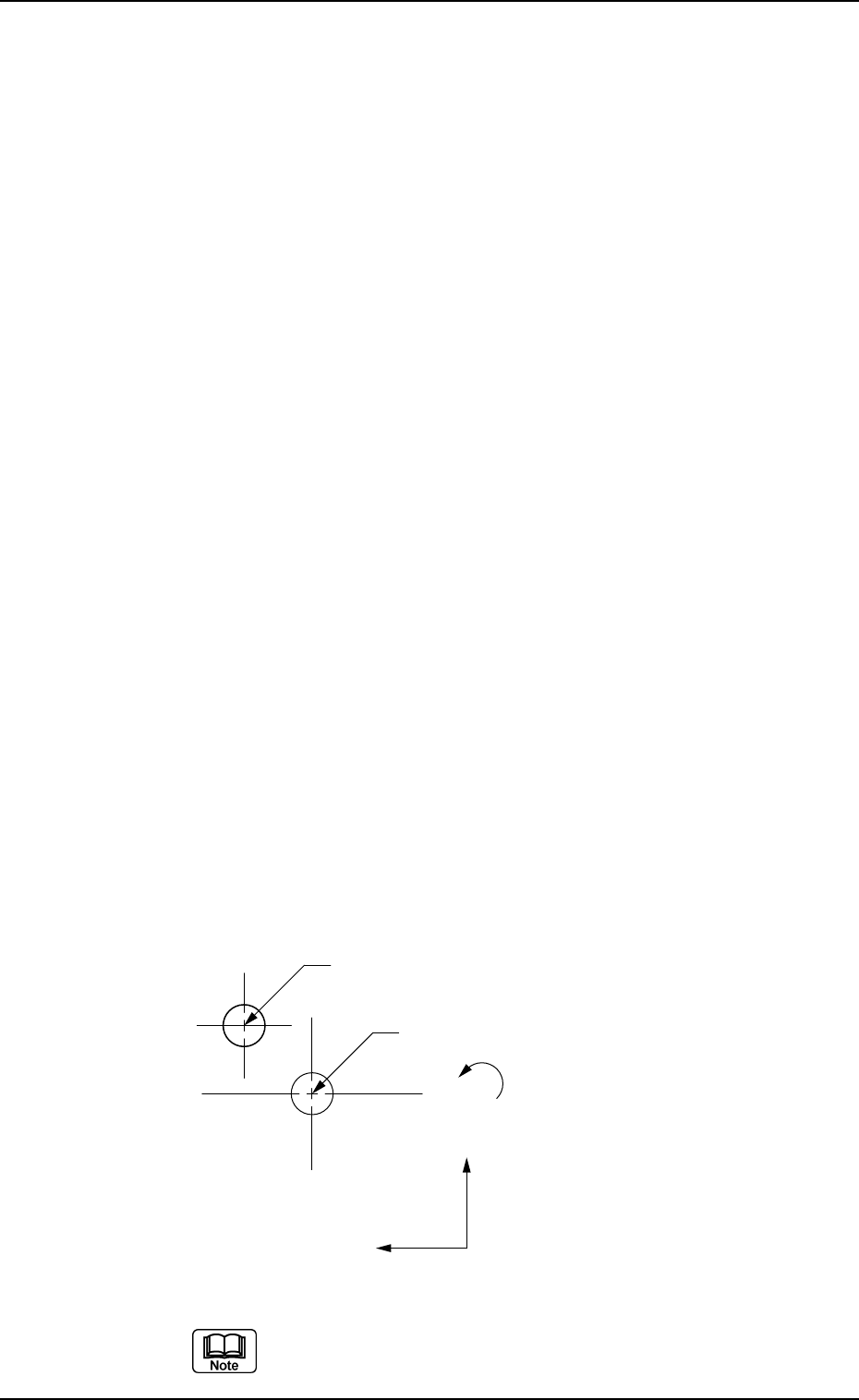
*3 Two-Camera Offset
Enter offset values in the text boxes based on the specified ones
for each axis, regarding the relative positional deviations be-
tween the P.E.C. and screen recognition cameras.
Fig. 3D26
When the 2-Camera Calibration operation is performed,
offset values can be entered automatically.
Center of P.E.C. Recognition Camera
Center of Screen Recognition Camera
X(+)
Y(+)
θ(+)