CPP2157620_SMT_Programming_C程序编辑手册.pdf - 第122页
2-72 2 7. 跟踪与示教 7.1 跟踪功能 跟踪功能,是使相机等示教装置自动移至目标对象位置的功能,主要用于确认已输入的 X、Y 坐标。 n 要点 合并基板程序时,如果从 [ 基板 ] 信息画面使用跟踪功能,必须按轨道切换按钮切换到想要操作的轨道后再操作。 1 固定基板。 使用“装置”画面的 [ 传送宽度 ] 按钮,将基板固定在传送轨上。 2 按 [ 示教 ] 按钮,打开示教画面。 在基板信息的“贴装” 、 “位移” 、 “…

2-71
2
2
输入球位置数据。
输入所有的球位置数据。
1. 与前项“6.2”相同,将基准球设在 0 〜 7 中。
2. 输入基准球和除此以外的所有球的 X 坐标和 Y 坐标。
对球位置的输入顺序没有特别规定,但必须先输入 X 坐标。
● 基准球位置的输入
在“#POSn”的后面输入“X 坐标”、“Y 坐标”。
例如,当基准球位置为 0 时,输入“#POS0 x.xxx (X 坐标 ) y.yyy (Y 坐标 )”。
必须输入基准球 0 〜 7 的所有数据。
● 基准球位置以外的球位置的输入
输入“#POS x.xxx (X 坐标 ) y.yyy (Y 坐标 )”。
必须输入基准球以外的所有数据。
基准球位置、球位置
输入示例
基准球位置
球位置
25241-P2-00
在此输入的数据将反映在“随机球栅编辑”画面的“基准球位置”、“X(mm)”、“Y(mm)”栏中。
参考
如果球的个数很多,可以边编号边输入,以便确认已输入的球的个数。
3
保存数据后退出。
所有数据输入完毕,并确认已输入了必要的数据和没有输入无关的数据后,保存数据。
保存时,可以使用任意的文件名,但必须将扩展名指定为“.POS”。
可以保存在网络电脑或 USB 存储器等任意位置。
c
注意
使用 USB 存储器保存数据时,必须使用本公司指定的 USB 存储器。
n
要点
将外部电脑创建的“随机球栅位置 (POS) 信息文件”读入“No.1”文件夹中时,使用“基板资源管理器”。参阅第 6 章“2. POS
信息文件的管理”。
2-72
2
7.跟踪与示教
7.1 跟踪功能
跟踪功能,是使相机等示教装置自动移至目标对象位置的功能,主要用于确认已输入的 X、Y 坐标。
n
要点
合并基板程序时,如果从 [ 基板 ] 信息画面使用跟踪功能,必须按轨道切换按钮切换到想要操作的轨道后再操作。
1
固定基板。
使用“装置”画面的 [ 传送宽度 ] 按钮,将基板固定在传送轨上。
2
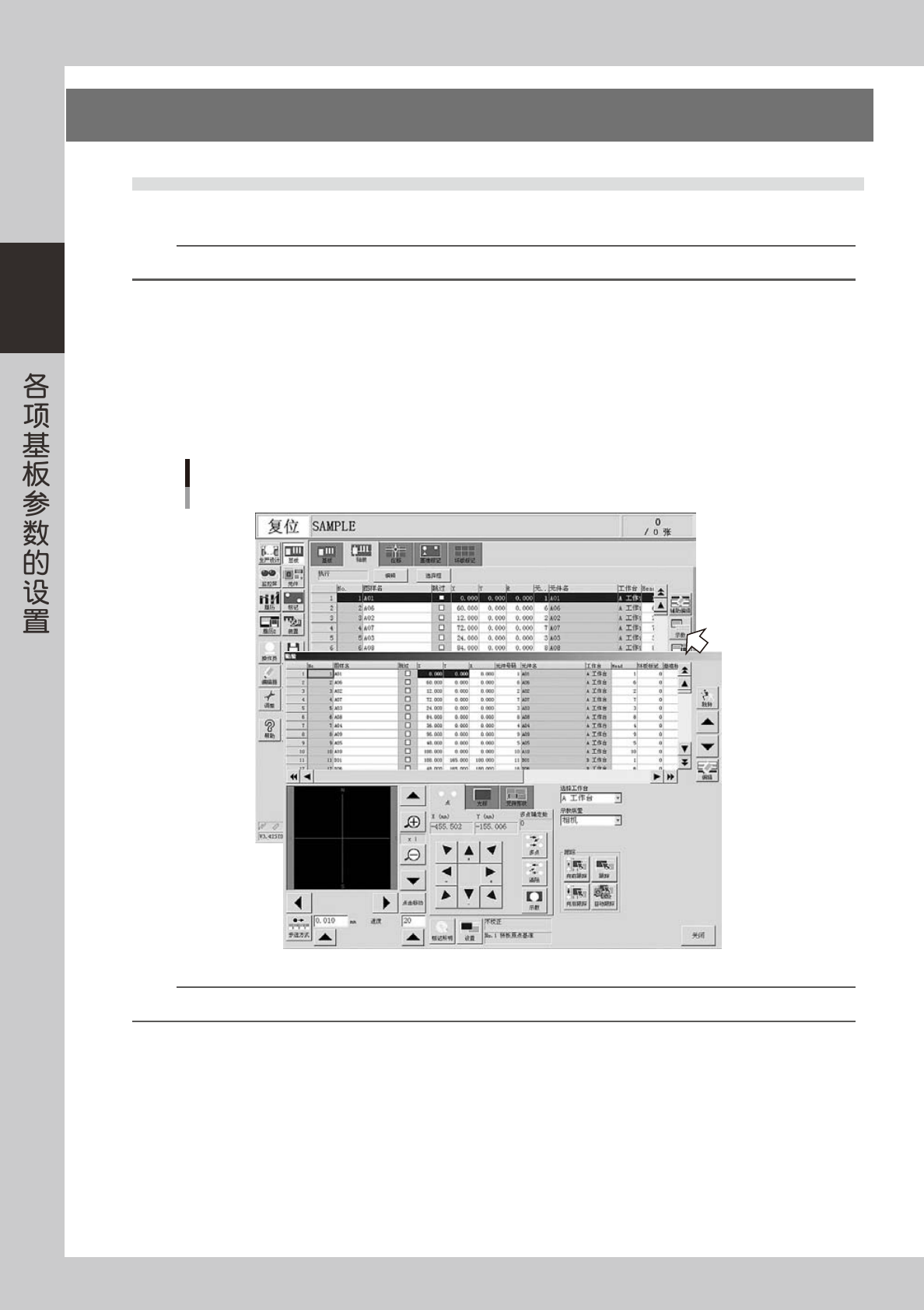
按 [ 示教 ] 按钮,打开示教画面。
在基板信息的“贴装”、“位移”、“基准标记”、“坏板标记”选项卡以及元件信息画面有 [ 示教 ] 按钮。
按 [ 示教 ] 按钮,打开示教画面。
打开示教画面
以YS24为例
26239-P2-20
参考
有多个工作台的贴片机,会显示选择工作台的下拉框。
2-73
2
3
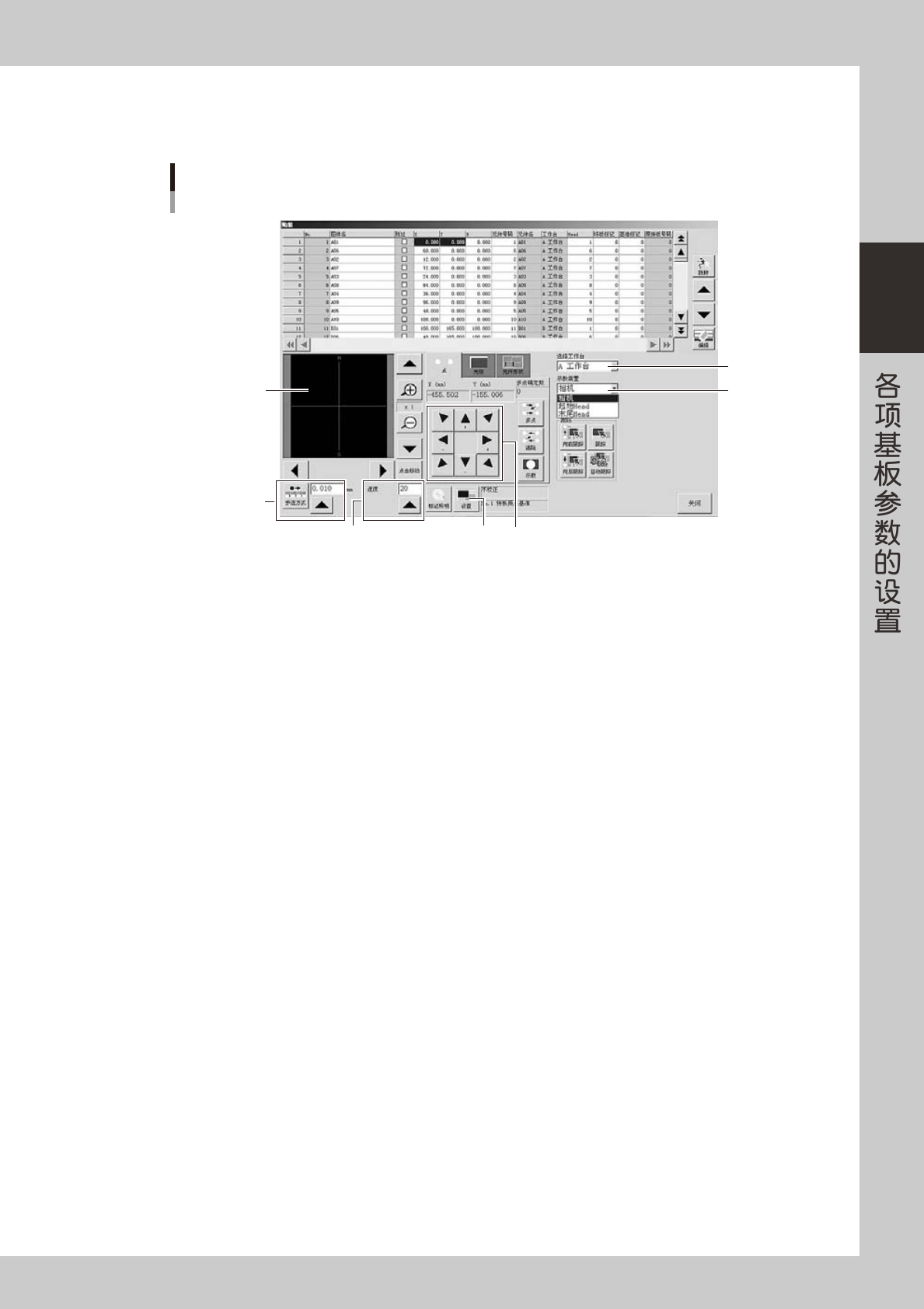
设置条件。
参考下述说明设置。
示教的条件设置
以YS24为例
2
4
箭头按钮
5
3
1
图像显示区
26240-P2-20
1. 选择工作台 ( 仅限有多个工作台的贴片机 )
选择想要跟踪的工作台。
2. 示教装置
指定想要移至指定坐标位置的装置。从“相机”、“起始 Head”、“末尾 Head”中选择。
一般选择“相机”。
3. 步进方式
可对贴装头的移动进行微调。
[ 步进方式 ] 按钮为按下状态时,所设置的移动距离被优先。
因此,即使连续按箭头按钮,连续移动也不会变为高速移动。
[ 步进方式 ] 按钮
用于贴装头的微调。按 1 次箭头按钮,贴装头仅移动设置的距离 (mm)。
可在 0.000 〜 10.000 的范围内设置距离。
4. 速度
设置示教装置的移动速度。可在 1 〜 100 之间任意设置。
按箭头按钮,进行移动。连续按此按钮,则从连续移动转为高速移动。
设置为 10 或 20,虽然会感觉动作迟缓,但为了安全,建议开始最好设置为较慢的速度。