CPP2157620_SMT_Programming_C程序编辑手册.pdf - 第141页
3-2 3 4 设置“送料器类型”参数。 从下拉框中选择“宽幅多杆式”或“多杆式” 。 送料器类型的选择 26301-P2-00 5 设置“送料振动时间 ( 秒 )”参数。 送料振动时间是设置送料器机体的振动时间 ( 传送元件的时间 ) 的参数。 默认值为“标准 (0)”即振动 2 秒钟。 根据元件的具体情况在 +0.4 〜 -3.5 秒的范围内设置。 n 要点 一般,机器设置内的送料振动时间为 2 秒。如果选择 -2.0 以上的值时,…

3-1
3
1.带式送料器以外的供料装置
1.1 宽幅多杆式送料器
使用宽幅多杆式送料器的元件,需设置下列参数。
1
安装送料器。
将装有元件的送料器固定在送料器架上。安装位置必须满足下列 2 个条件。
1. 必须是基准标记识别相机可以到达的位置
因为需要用基准标记识别相机示教吸料位置。
2. 前侧送料器架内
元件数据要求将宽幅多杆式送料器安装在前侧送料器架内。
2
选择元件。
打开元件画面,将光标移到用宽幅多杆式送料器供给元件的数据行。
3
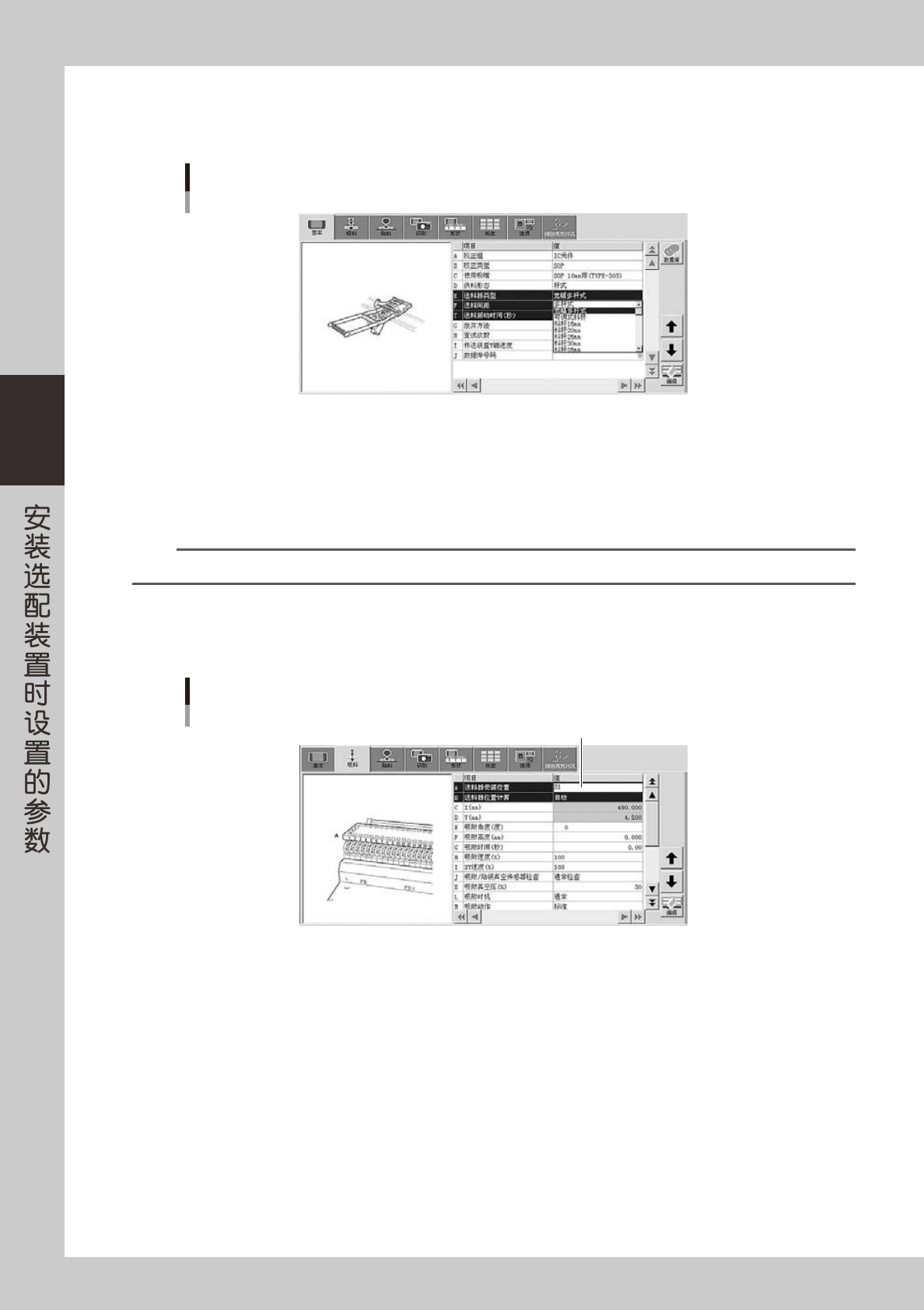
设置“供料形态”参数。
将“基本”画面的“供料形态”参数设置为“杆式”。
元件的选择、供料形态的设置
设置为“杆式”
26300-P2-00
3-2
3
4
设置“送料器类型”参数。
从下拉框中选择“宽幅多杆式”或“多杆式”。
送料器类型的选择
26301-P2-00
5
设置“送料振动时间 ( 秒 )”参数。
送料振动时间是设置送料器机体的振动时间 ( 传送元件的时间 ) 的参数。
默认值为“标准 (0)”即振动 2 秒钟。
根据元件的具体情况在 +0.4 〜 -3.5 秒的范围内设置。
n
要点
一般,机器设置内的送料振动时间为 2 秒。如果选择 -2.0 以上的值时,会被计算为 0 秒,则此值无效。此时自动采用“标准 (0)”。
6
设置“送料器安装位置”参数。
在“吸料”画面的“送料器安装位置”参数中输入送料器安装号码。
输入送料器安装位置号码
送料器安装位置号码的输入
26302-P2-00
3-3
3
7
设置“送料器位置计算”参数。
将“吸料”画面的“送料器位置计算”参数设置为“示教”或“相对示教”。
■ 送料器位置计算
该参数,是设置求取吸附元件时的位置坐标的方法的参数。
自动
自动算出送料器架的基准位置至吸附位置的距离。只需在“送料器安装位置”栏输入任意数值就可以决定吸附位置。
如带式送料器一样,吸附位置不受元件尺寸等的限制只取决于送料器安装位置时,设置为“自动”。
示教
如多杆式送料器一样,吸附位置不受送料器安装位置的限制只随所供给的元件而变化时设置。此时,吸附位置坐标是以机械
原点为基准的值,因此必须以示教方式输入。
此外,选择为“示教”后,送料器安装位置也就被固定,因此也就被排除在送料器安装位置优化的对象之外。
相对示教
如多杆式送料器一样,吸附位置随供给的元件而变化时设置。此时,吸附位置坐标是以 8mm 送料器的基准吸附位置为基准的
位移量,即从固定送料器用定位销的中心至吸附位置的距离。与“示教”不同,它可以对送料器位置进行优化,而且还可以
在脱机状态下输入。
c
注意
在脱机状态下输入时,必须准确测量从固定送料器的定位销至吸附位置的位移量后输入吸附位置“X(mm)”、“Y(mm)”栏中。
8
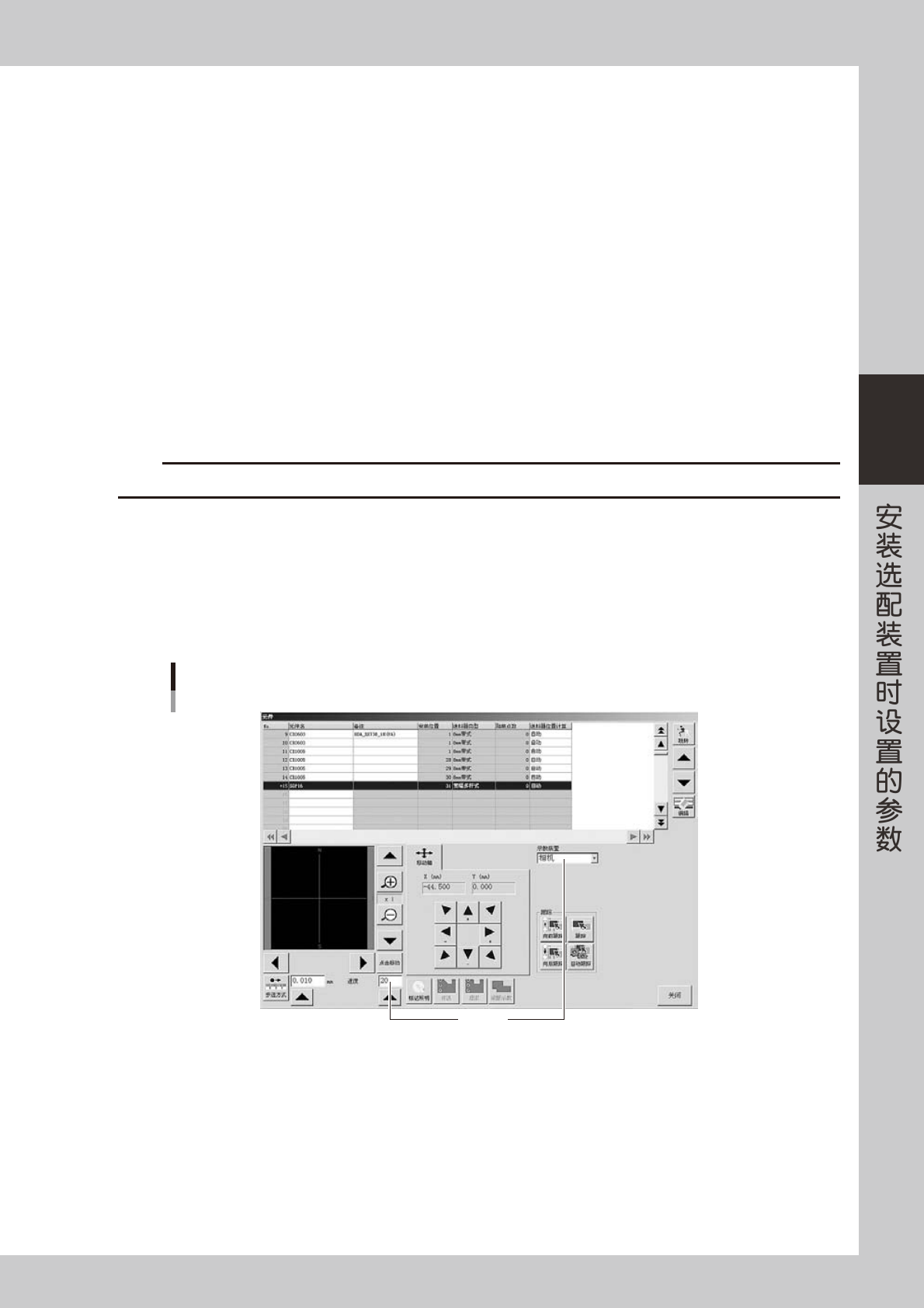
跟踪“送料器安装位置”。
跟踪宽幅多杆式送料器的吸附位置之前,需使用跟踪功能将示教装置移至吸附位置附近。
1. 将“送料器位置计算”设置为“自动”。在 Step6 中设置的“送料器安装位置”的坐标值,会自动输入
至吸附位置“X(mm)”、“Y(mm)”栏中。
2. 按 [ 示教 ] 按钮,打开示教 ( 跟踪 ) 画面。
设置条件
示教、跟踪画面
26303-P2-00
3. 确认跟踪的条件 ( 示教装置为“相机”,速度为“20 〜 40”)。
4. 按“跟踪”按钮,进行示教。示教装置移至吸附位置“X(mm)”、“Y(mm)”栏所设置的坐标位置。