CPP2157620_SMT_Programming_C程序编辑手册.pdf - 第83页
2-33 2 2.4 贴料参数 贴料参数 以Z:LEX(YSM20) FM贴装头机型为例 26213-P2-00 A: 贴装高度 设置贴装元件时使吸嘴下降的 Z 轴的高度校正值。 一般设置为“0.0” ,想要降低时,输入正值,想要升高时,输入负值。 B: 贴装时间 设置贴装元件时从感知真空压到吸嘴在下降端停留的时间 ( 秒 )。 一般设置为“0.00” ,如果吸附、贴装动作不稳定,可以相应延长时间值。此外,此设置还与外接式托盘交…
2-32
2
J: 吸附 / 贴装真空传感器检查
一般设置为“通常检查”。如果想要更严格地检查吸附错误和元件被带回的现象,设置为“特殊检查”。如果想要对 QFP、
BGA 等元件的吸附错误和带回元件现象比其它元件作更严格地检查时,设置为“特殊检查”。
n
要点
设置为“通常检查”,可以控制吸贴元件时下降后的贴装头开始上升的时机。“真空传感器检查”的设置只在基板信息的“负压确认”
设置为“执行”时才有效。
K: 吸附真空压
此真空压是执行真空传感器检查时用的基准真空压。
使用数据库的默认设置,根据需要,参阅本章“3.1进行元件调整”进行调整。
L: 吸附时机
设置吸附元件时贴装头开始真空动作的时机。
如果选择“通常”,贴装头下降前开始执行真空动作 ;如果选择“下降端”,贴装头下降后开始执行真空动作。
一般设置为“通常”。
M: 吸附动作
指吸附贴装元件时吸嘴的下降动作。一般设置为默认值“标准”。
选择“详细设置”,可以详细设置吸贴元件时的“轴停止”条件和吸嘴的“上升”、“下降”顺序。
N: 轴停止
一般设置为“通常”。
吸附小型元件等精度要求较高的元件时,选择“公差等待”( 此参数只有将“M: 吸附动作”设置为“详细设置”时才有效 )。
O、P: 下降、上升
设置适合元件使用的吸嘴下降和上升的顺序。
如果没有特殊问题,可以使用默认设置 ( 此参数只有将“M: 吸附动作”设置为“详细设置”时才有效 )。
Q: 负荷控制 (YSM40 FL 贴装头、Z:LEX[YSM20] FM 贴装头 )
设置吸附元件时是否进行负荷控制。进行负荷控制时,选择“执行 ( 高精度 )”。
R: 目标负荷 (YSM40 FL 贴装头、Z:LEX[YSM20] FM 贴装头 )
使用负荷控制时,输入目标负荷。可在 0.0N 〜 60.0N 范围内以 0.1N 为单位输入,但实际可以使用的范围为 5.0N 〜 25.0N。
S: 吸嘴接触面偏移量
设置元件顶面最高点到吸嘴前端接触位置的距离。

2-33
2
2.4 贴料参数
贴料参数
以Z:LEX(YSM20) FM贴装头机型为例
26213-P2-00
A: 贴装高度
设置贴装元件时使吸嘴下降的 Z 轴的高度校正值。
一般设置为“0.0”,想要降低时,输入正值,想要升高时,输入负值。
B: 贴装时间
设置贴装元件时从感知真空压到吸嘴在下降端停留的时间 ( 秒 )。
一般设置为“0.00”,如果吸附、贴装动作不稳定,可以相应延长时间值。此外,此设置还与外接式托盘交换器连动。
C: 贴装速度
与吸料参数的“吸附速度”相同 ( 设定值也连动变化 )。
D: XY 速度
与吸料参数的“XY 速度”相同 ( 设定值也连动变化 )。
E: 吸附 / 贴装真空传感器检查
一般设置为“通常检查”。如果想要严格地检查吸附错误和元件被带回的现象,设置为“特殊检查”。
n
要点
设置为“通常检查”,可以控制吸贴元件时下降后的贴装头开始上升的时机。“真空传感器检查”的设置只在基板信息的“负压确认”
设置为“执行”时才有效。
F: 贴装真空压
此真空压是执行真空传感器检查时用的基准真空压。
使用数据库的默认设置,根据需要,参阅本章“3.1进行元件调整”,进行调整。
G: 贴装动作
与吸料参数的“吸附动作”相同 ( 设定值也连动变化 )。
H: 轴停止
一般设置为“通常”。
吸附小型元件等精度要求较高的元件时,选择“公差等待”( 此参数只有将“G: 贴装动作”设置为“详细设置”时才有效 )。
I、J: 下降、上升
设置适合元件使用的吸嘴下降和上升的顺序。
如果没有特殊问题,可以使用默认设置 ( 此参数只有将“G: 贴装动作”设置为“详细设置”时才有效 )。
K: 负荷控制 (YSM40 FL 贴装头、Z:LEX[YSM20] FM 贴装头 )
设置贴装元件时是否进行负荷控制。进行负荷控制时,选择“执行 ( 简易 )”。
L: 目标负荷 (YSM40 FL 贴装头、Z:LEX[YSM20] FM 贴装头 )
使用负荷控制时,输入目标负荷。可在 0.0N 〜 60.0N 范围内以 0.1N 为单位输入,但实际可以使用的范围为 5.0N 〜 25.0N。
M: 吸嘴接触面偏移量
设置元件顶面最高点到吸嘴前端接触位置的距离。
2-34
2
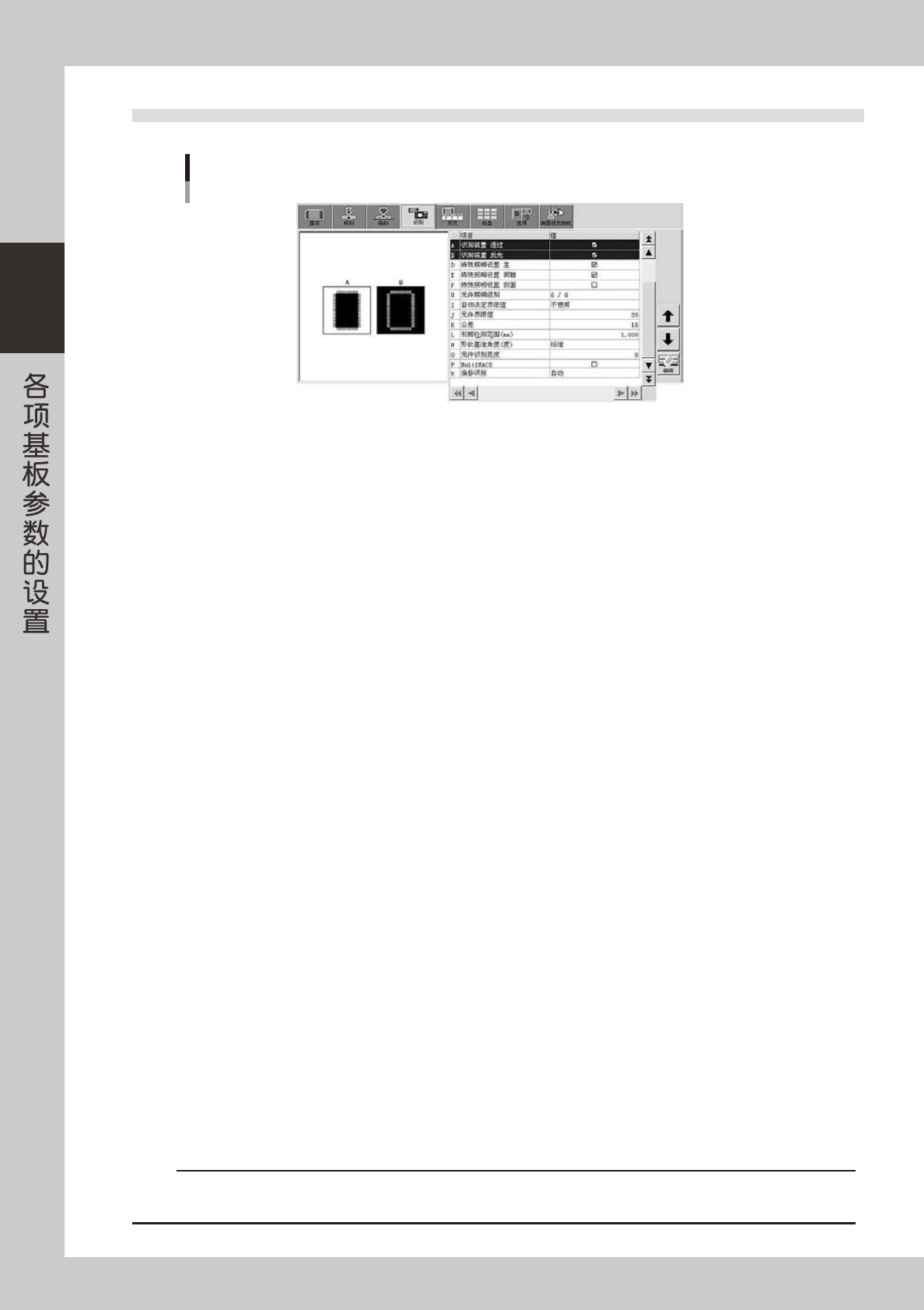
2.5 识别参数
识别参数
26214-P2-10
A、B: 识别装置 ( 透过 )、识别装置 ( 反光 )
指定识别元件时使用的装置。一般使用默认值 ( 同时选择“透过”与“反光”)。
在 YS12、YS12P、YS24、Z:LEX[YSM20](HM 贴装头 ) 中,如果选择“B: 识别装置反光”,则 8mm 以上的元件使用多视觉相
机进行识别,而比 8mm 元件小的元件则使用反光扫描相机进行识别。
反光扫描相机 ( 仅限 YS12、YS12P、YS24、Z:LEX[YSM20]HM 贴装头 )
一般,反光扫描相机的选择框为勾选状态,如果删除选择框中的勾号,则使用扫描相机以外的相机进行识别。需要强制使用
多视觉相机识别时,删除反光相机选择框中的勾号。
D 〜 F: 照明设置
选择“主”、“同轴”、“侧面”。一般使用默认值 ( 同时选择“主”和“同轴”)。想要对 BGA 识别是否缺球时,只能选择“侧面”。
H: 元件照明级别
指定反光照明的亮度。一般使用默认值,在后述的元件调整中进行优化。
I: 自动决定界限值
识别芯片元件时,从摄得的图像自动算出界限值再进行识别的功能。
J: 元件界限值
识别元件时,为区别反光部分 ( 引脚 ) 和背景之间亮度的界限值。一般使用默认值,在后述的元件调整中进行优化。
BGA 元件省略此参数。
K: 公差
识别元件时,误差的允许范围在 0 〜 100% 的范围内指定。数值越大公差也越大。最初使用默认值,在后述元件调整的识别
测试中边观察边逐渐放大。根据元件的种类判断放大比例,一般控制在 30% 左右较为合适。
L: 引脚检测范围
检测元件引脚的范围。此值越大检测范围越广,图像处理的速度越低。一般使用默认值,在后述的元件调整中进行优化。
N: 形状基准角度
设置元件形状的定义角度的基准。一般使用默认值。
O: 元件识别亮度
识别元件成功后,对元件外形部分亮度级别进行测量。所测得的亮度如果超过了此处所设定的界限值时,表示元件识别成功
( 此功能只有将“校正类型”设置为“标准芯片”时才有效 )。
O: 球吻合度
在 0 〜 100% 的范围内,设置识别元件过程中抽出球时的最小吻合度。
吻合度,是使随机球栅编辑画面设置的球直径和实际识别的球直径相吻合而设置的数值。一般,使用默认值 0。
对球看上去均一的元件,可以设置较大的数值 ; 反之,则设置较小的数值,可以提高识别率 ( 此功能只有将“基本”参数的
“A:校正组”设置为“Ball 元件”,“B:校正类型”设置为“倒装芯片”时才有效 )。
关于随机球栅编辑画面,参阅本章“6.2倒装芯片”的内容。
c
注意
更改设定值时,如果更改的值过大,可能会漏识别球而发生识别错误。如果更改的值过小,可能会将球以外的噪点等误识别为球而
发生识别错误或贴装位置偏移等现象。此外,如果不将此值改小就无法成功识别时,可能是球直径不正确。