CPP2157620_SMT_Programming_C程序编辑手册.pdf - 第296页
A-24 8: 芯片阵列识别 想要使用电极 ( 引脚 ),对电阻阵列、电容器阵列元件进行定位时使用。识别方法根据电极类型不同会有所不同。 芯片元件 8: 芯片阵列识别 元件例 N S E W N S E W 仰视图 引脚 检测线位置 电极类型:电阻 电极类型:电容 A B 25706-P0-00 检测线宽度 ( 如上图 A) 指定检测引脚用的检测线的宽度。在不超过引脚宽度看上去较稳定的范围内,如果设置为较大的值,可避免引脚受噪…
A-23
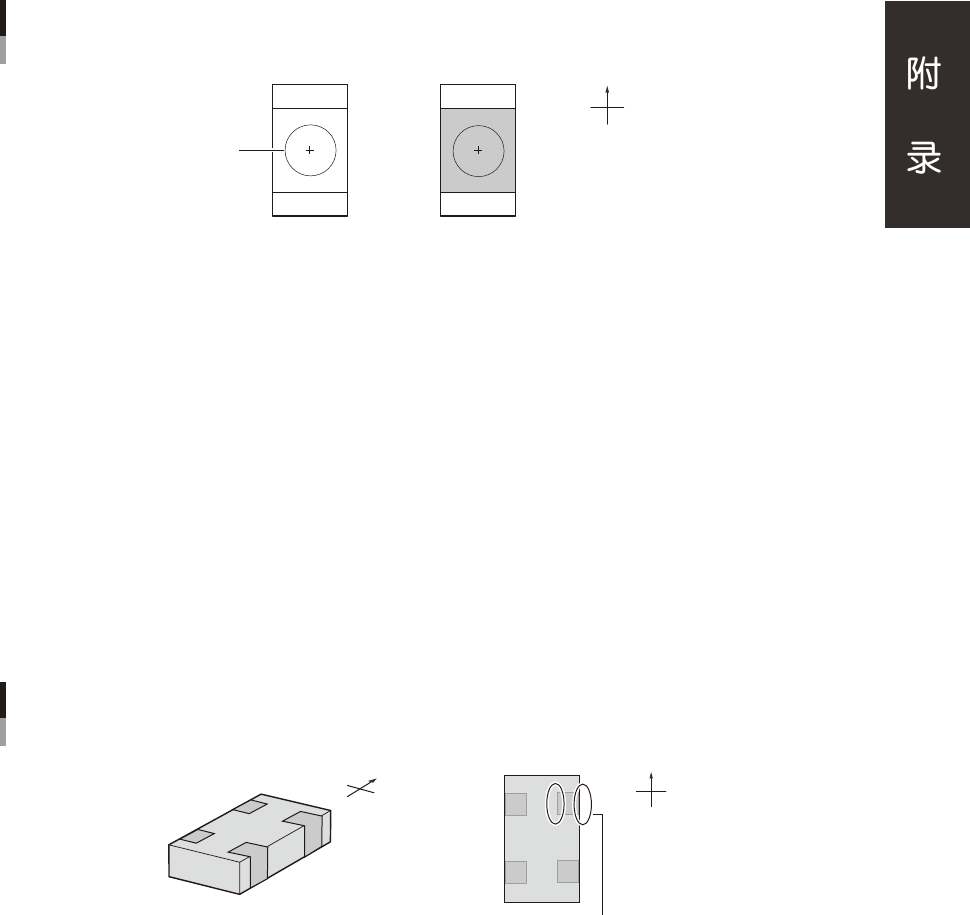
4: 中央部亮度检查
适用于辨别芯片元件的正反面。以圆 ( 以下称“检查区域圆”) 指定检查亮度的范围,测量元件中央部的平均亮度,辨别正
反面。
芯片元件
4: 中央部亮度检查 元件例(仰视图)
OK NG
N
S
EW
亮度测量范围
(检查区域圆)
25704-P0-00
检查界限值
比较检查区域圆的平均亮度与此处所设定的值,进行正反面判定。
检查区域直径 (mm)
指定检查区域圆的直径。
NG 对象
指定判定为错误的条件。
‧
黑
检查区域圆的平均亮度比“检查界限值”暗时,判定为错误。
‧
白
检查区域圆的平均亮度比“检查界限值”亮时,判定为错误。
5: 重试电极中心检测
适用于片状元件,且横方向 (E、W 方向 ) 端部的位置无法准确识别的元件。进行识别测试时,背景和电极 ( 引脚 ) 的明暗差 ( 对
比度 ) 不明显的元件等,可以使用。
芯片元件
5: 重试电极中心检测 元件例
N
S
E
W
仰视图
背景和电极(引脚)的明暗差不明显
N
S
EW
25705-P0-00
角度校正
元件端部的细小毛刺等在检测线上使贴装角度不稳定时,如果指定为“有”,则可使贴装角度保持稳定。
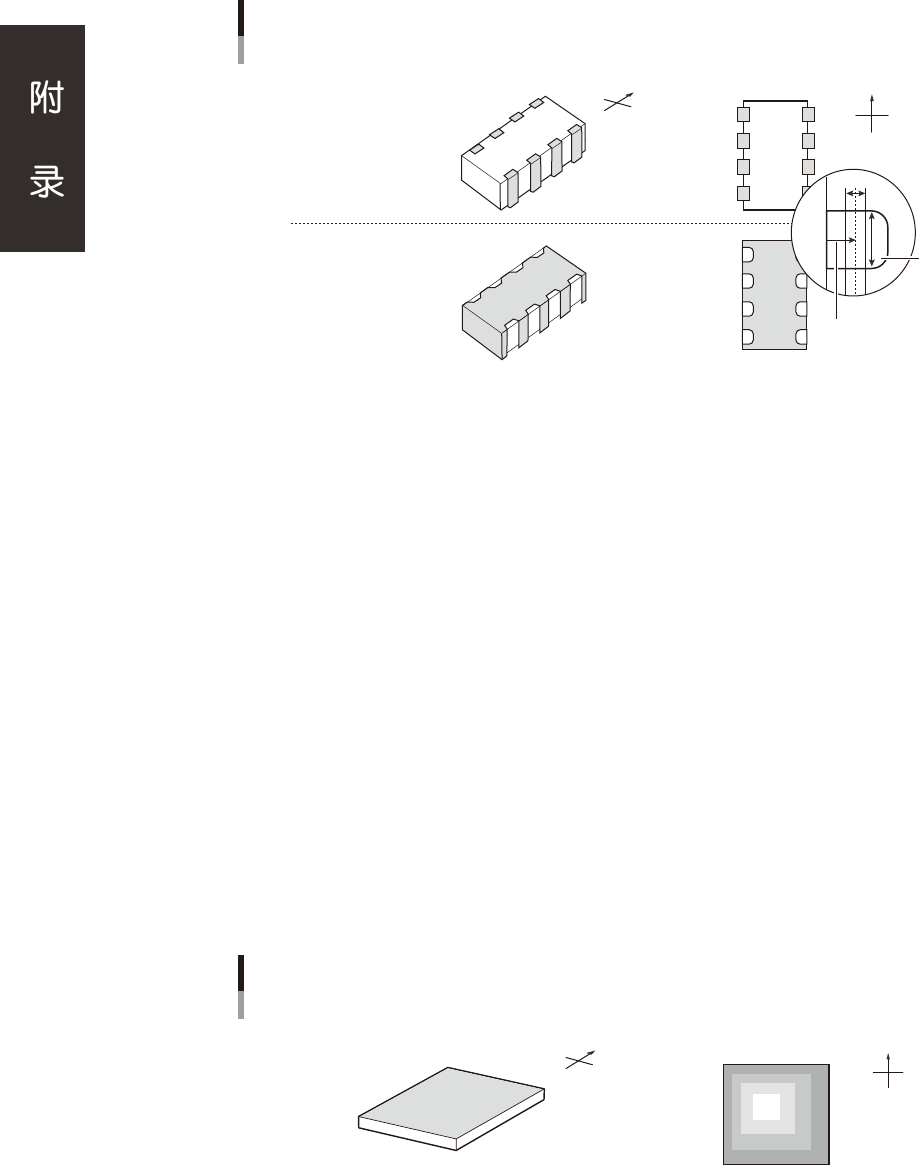
A-24
8: 芯片阵列识别
想要使用电极 ( 引脚 ),对电阻阵列、电容器阵列元件进行定位时使用。识别方法根据电极类型不同会有所不同。
芯片元件
8: 芯片阵列识别 元件例
N
S
EW
N
S
E
W
仰视图
引脚
检测线位置
电极类型:电阻
电极类型:电容
A
B
25706-P0-00
检测线宽度 ( 如上图 A)
指定检测引脚用的检测线的宽度。在不超过引脚宽度看上去较稳定的范围内,如果设置为较大的值,可避免引脚受噪点等的
影响。
引脚根数
指定 E、W 方向中任一方向的引脚根数。
引脚间距 (mm)
准确输入引脚间的宽度。
引脚宽度 (mm)( 如上图 B)
输入端子部分的宽度。
反光引脚长 (mm)
输入识别时发亮部分的引脚的长度。
电极类型
指定电极的形状。
如上图上侧的形状时,指定为“凸 ( 电阻 )”;如下侧的形状时,指定为“□ ( 电容器 )”。
■ 裸芯片
12: 尺寸匹配识别
适用于识别面有明暗差 ( 反光不均 ),且用“标准”算法无法准确识别的芯片元件。更改界限值,提取接近外形尺寸的边缘。
裸芯片元件
12: 尺寸匹配识别 元件例
N
S
E
W
N
S
EW
仰视图
25707-P0-00
A-25
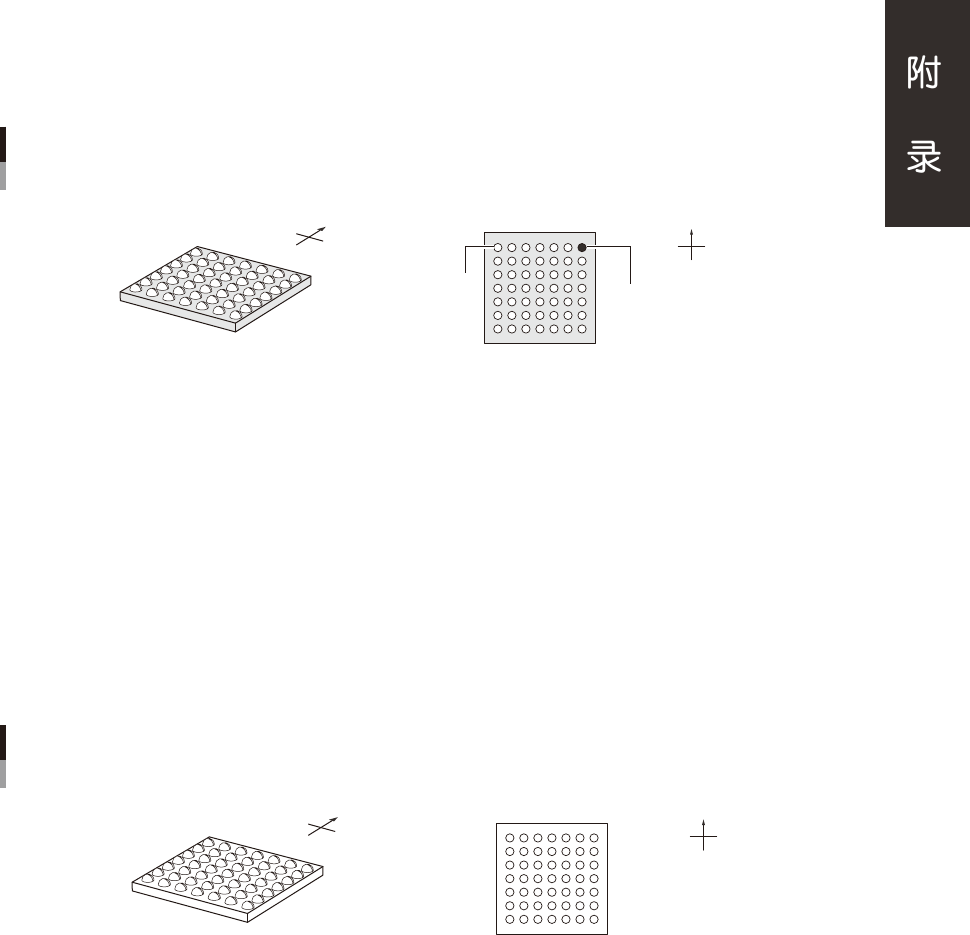
A3.3.3 Ball 元件
下面,介绍校正组为“Ball 元件”,校正类型为“简易 BGA”、“BGA”、“简易倒装芯片”、“倒装芯片”时的算法。
■ 简易 BGA
1: 极性判定
适用于只想用简易设置进行识别的,横竖方向的间距相同,除极性球以外的所有格栅上都排列有球的 BGA 元件。只对指定的
格栅上 (1 处 ) 检查是否有球存在。
简易BGA
1: 极性判定 元件例
极性球
原点
N
S
EW
N
S
W
E
仰视图
25708-P0-00
极性判定用球的列号、极性判定用球的行号
指定极性判定用的格栅位置 ( 原点 :仰视时的左上 )。
极性判定位置是否有球
指定极性判定为错误时的条件。
‧
有
“极性判定用球的列号”、“极性判定用球的行号”中设置的格栅位置中没有检出球时,判定为错误。
‧
无
“极性判定用球的列号”、“极性判定用球的行号”中设置的格栅位置中检出了球时,判定为错误。
3: 简易白色 BGA
适用于只想用简易设置进行识别的,BGA 载体为白色,横竖方向间距相同,所有格栅上都排列有球的 BGA 元件。此算法只对
球的总数进行检查,不检查各格栅上是否有球。
简易BGA
3: 简易BGA 元件例
N
S
EW
N
S
W
E
仰视图
25709-P0-00
有球界限值
指定提取球时的检测界限值。一般,设置为 0。
球部分和载体部分的颜色浓度差大于此处所设定的值时,作为球提取。