CPP2157620_SMT_Programming_C程序编辑手册.pdf - 第293页
A-21 A3.3.2 芯片元件 下面,介绍校正组为“芯片元件” ,校正类型为“标准芯片” 、 “裸芯片”时的算法。 ■ 标准芯片 1: 电极有缺少的芯片的识别 适用于一部分角缺少的芯片元件。 芯片元件 1: 电极有缺少的芯片的识别 元件例 N S E W 仰视图 N S W E 25701-P0-00 缺少方向 指定哪个方向上缺少电极。以元件底面的中心为基准,从“左上” 、 “右上” 、 “左下” 、 “右下”中选择。 2:…
A-20
A3.3.1 特殊算法参数
下面,介绍“形状”画面的“算法”参数设置为“标准”以外时显示的参数 ;或“校正组”的设置为“特殊元件”,
“编辑模式”的设置为“简易”时所显示的参数。
n
要点
设置参数时,必须通过元件调整等功能边确认图像,边尽可能设置为精确的数值。
参考
关于通用参数,参照第 2 章“各基板参数的设置”的“2.6 形状参数”的内容。
■ 特殊算法一览
校正组 校正类型 算法
芯片元件 标准芯片
1:
电极有缺少的芯片的识别
2:
电极亮度检查
3:
方向判定
4:
中央部亮度检查
5:
重试电极中心检测
8:
芯片阵列识别
裸芯片
12:
尺寸匹配识别
14:
微型裸芯片识别
Ball 元件 简易 BGA
1:
极性判定
3:
简易白色 BGA
BGA
4:
白色 BGA
7:
CGA 识别
10:
方向判定
12:
BGA 球变形度检查
简易倒装芯片
1:
外周凸点识别
倒装芯片
2:
简易高速
IC 元件 2 端子
3:
方向判定
10:
正反面判定
微型 Tr/SOT
4:
正反面判定
SOP
1:
边端引脚匹配
5:
正反面判定
6:
全部引脚的弯曲检查
7:
引脚宽度极性判定
8:
引脚位置检查
QFP
1:
边端引脚匹配
4:
引脚长度检查
PLCC
1:
边端引脚匹配
2:
NS 基准识别
3:
WE 基准识别
4:
方向判定
特殊元件 特殊形状
1:
边端引脚匹配
2:
长接插件识别
标记型
1:
标记线
2:
2 对象
3:
4 对象
4:
通用
6:
方向判定
8:
2 对象 ( 端子角度 )
特殊长方形
3:
方向判定
8:
屏蔽元件
10:
正反面判定
11:
4 角基准识别
参考
‧
关于标准的方向判定算法
如果识别结果为方向错误 ( 旋转校正量在 45 度以上或不满 -45 度 ),将丢弃元件。但,只有在使用 SOP 算法“引脚宽度极性判定”
时,可以进行元件的旋转贴装。
A-21
A3.3.2 芯片元件
下面,介绍校正组为“芯片元件”,校正类型为“标准芯片”、“裸芯片”时的算法。
■ 标准芯片
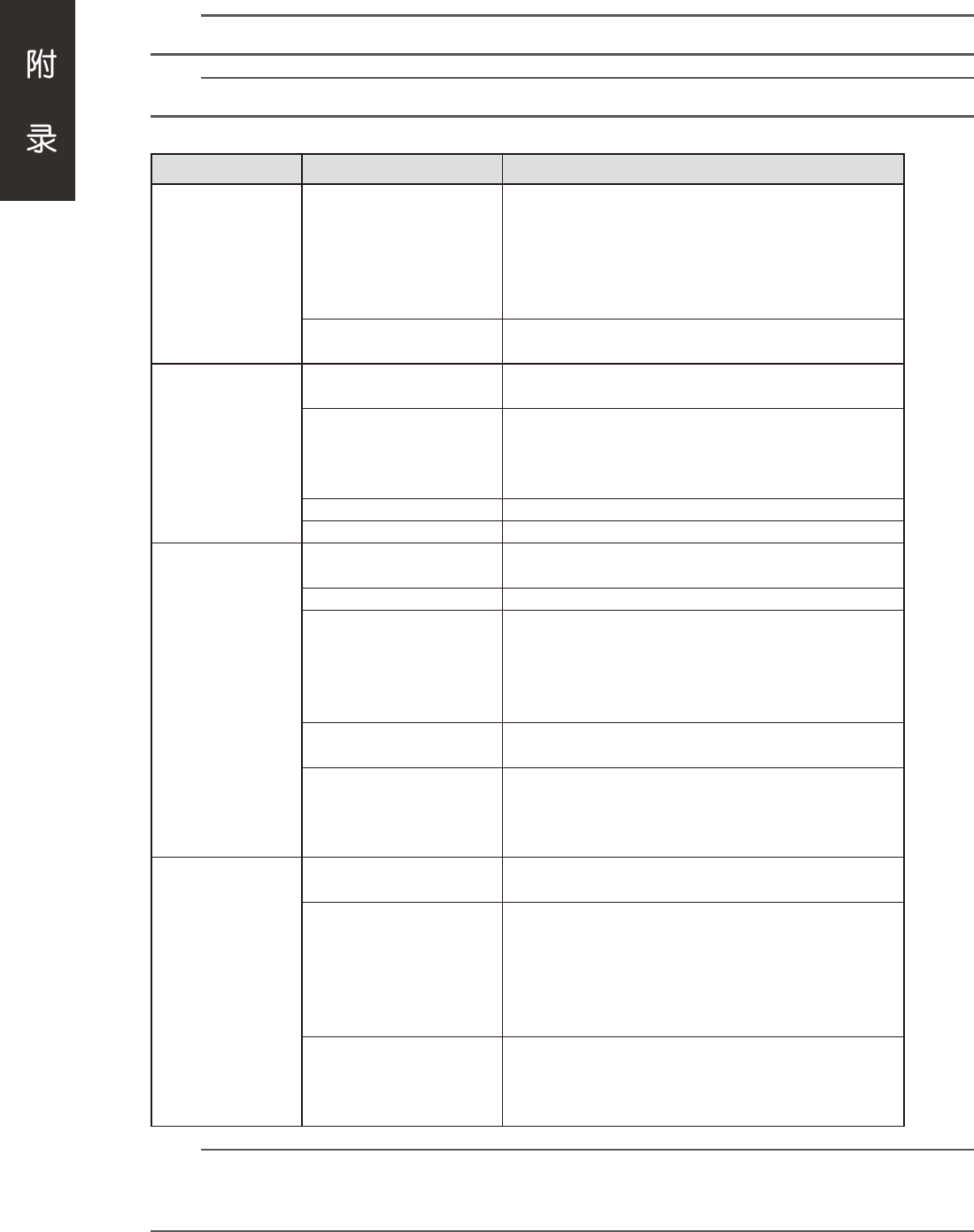
1: 电极有缺少的芯片的识别
适用于一部分角缺少的芯片元件。
芯片元件
1: 电极有缺少的芯片的识别 元件例
N
S
E
W
仰视图
N
S
W E
25701-P0-00
缺少方向
指定哪个方向上缺少电极。以元件底面的中心为基准,从“左上”、“右上”、“左下”、“右下”中选择。
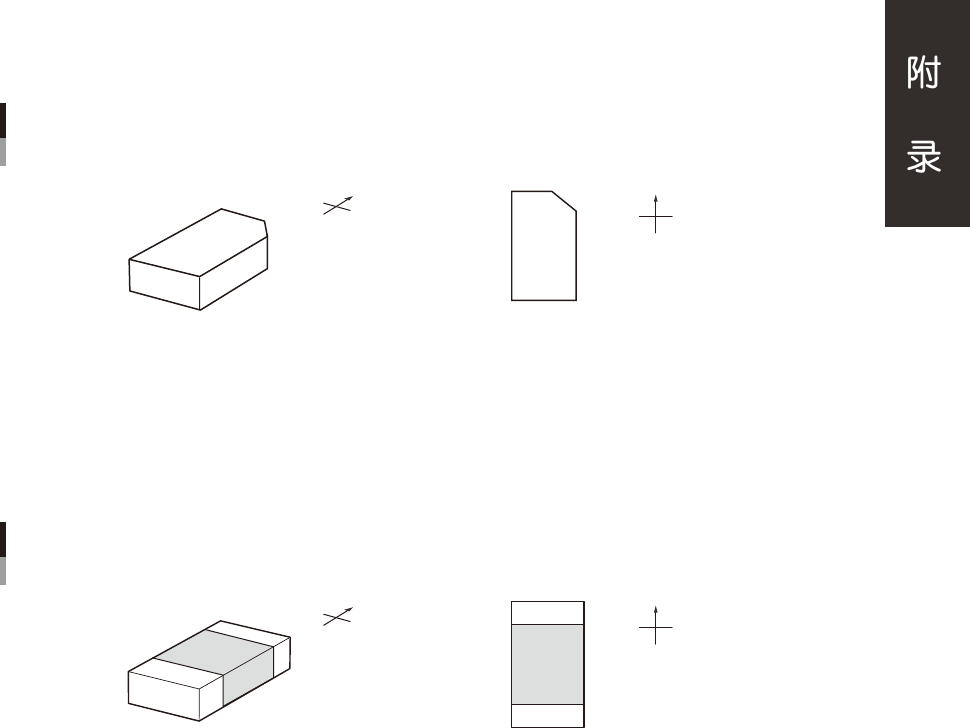
2: 电极亮度检查
适用于标准芯片元件。与“标准”算法的识别相同,但可以更为详细地设置检查条件。如果设置了元件识别亮度 ( 可以通过
识别测试自动设置 ),就可以确认电极部位的亮度,从而辨别有无元件。此外,还可以有效防止吸嘴误识别。
芯片元件
2: 电极亮度检查 元件例
N
S
E
W
仰视图
N
S
W E
25702-P0-00
多个吸附检查
检查是否吸附了多个元件。
‧
检 查
执行多个吸附检查。如果元件外周部有多余的边 ( 引脚等 ) 时,会发生错误。
‧
不检查
不执行多个吸附检查。
元件识别亮度
指通常的元件识别成功后测量的元件外形部分的亮度级别的界限值。
进行识别测试,可以测得元件电极部的最低亮度。所测得的亮度如果大于此处所设定的值,则视为元件的识别成功了。
如果小于此处所设定的值,则判定为错误。
检查方法
指定元件识别亮度的检查方法。
‧
引脚亮度
用“元件识别亮度”参数中所设定的值,检查引脚的亮度。
‧
引脚亮度与对称性
除检查引脚亮度外,还在元件的竖方向划上中心线,检查此线上的亮度是否对称。
‧
引脚亮度与亮度差
除检查引脚亮度外,还在元件的横方向划上中心线,检查此线上的亮度是否均匀。
A-22
梯形容许误差 (%)
识别梯形元件时,为正确识别,可在 0 〜 255% 的范围内指定容许误差。
指定为 0 时,会视为长方形元件而不进行检查。输入的数值越大,梯形的上下底边的长度差越大。
参考
以“上下电极宽度的差 ÷ 窄边的电极宽度 ×100(%)”算出的数值,如果大于此处所设定的数值时,会发生错误。
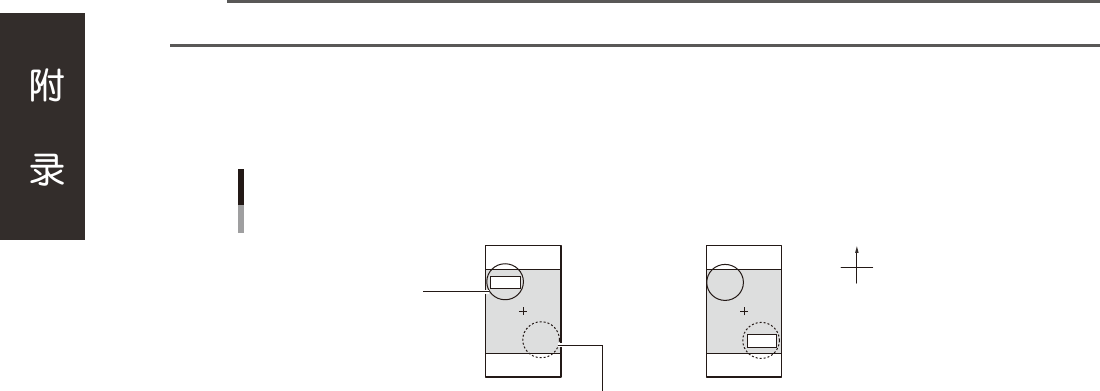
3: 方向判定
适用于辨别芯片元件的方向。以圆 ( 以下称“检测圆”) 指定测量亮度的范围,比较该圆区域和 180 度相对方向上的圆区域
( 旋转对称位置 ) 的平均亮度,辨别方向。识别面如果有指示极性的标记等时,可以使用。
芯片元件
3: 方向判定 元件例(仰视图)
0˚ +180˚
亮度测量范围
(检测圆)
旋转对称位置
N
S
EW
25703-P0-00
检查对象
检测圆区域的平均亮度,比旋转对称位置的圆区域的平均亮度亮时,指定为“白”;暗时,指定为“黑”。
检测角度
指定使元件旋转多少度后判定方向。
‧
2 种角度
使元件旋转 0 度、180 度后判定方向时指定。
‧
4 种角度
使元件旋转 0 度、90 度、180 度、270 度后判定方向时指定。
最小亮度差
检测圆区域与旋转对称位置的圆区域的最小对比度,在 0 〜 255 的范围内设置。一般,设置为 0。
检测圆区域的平均亮度与旋转对称位置的圆区域的平均亮度的差,如果小于此处所设定的值时,会发生错误。
检测圆直径 (mm)
指定检测圆的直径。使用元件调整功能确认元件后输入数值。
检测圆中心位置 X、Y
指定检测圆的中心位置。输入从元件中心到检测圆中心的距离。